【PyTorch】权重衰减
1. 理论介绍
- 通过对模型过拟合的思考,人们希望能通过某种工具调整模型复杂度,使其达到一个合适的平衡位置。
- 权重衰减(又称 L 2 L_2 L2?正则化)通过为损失函数添加惩罚项,用来惩罚权重的 L 2 L_2 L2?范数,从而限制模型参数值,促使模型参数更加稀疏或更加集中,进而调整模型的复杂度,即: L ( w , b ) + λ 2 ∥ w ∥ 2 L(\mathbf{w}, b) + \frac{\lambda}{2} \|\mathbf{w}\|^2 L(w,b)+2λ?∥w∥2其中 λ \lambda λ为权重衰减的超参数。
- 权重衰减建立在以下假设上:权重的值取自均值为0的高斯分布。
-
L
p
L_p
Lp?范数:
∥
x
∥
p
=
(
∑
i
=
1
n
∣
x
i
∣
p
)
1
/
p
\|\mathbf{x}\|_p = \left(\sum_{i=1}^n \left|x_i \right|^p \right)^{1/p}
∥x∥p?=(i=1∑n?∣xi?∣p)1/p
当 p = 1 p=1 p=1时称为 L 1 L_1 L1?范数;当 p = 2 p=2 p=2时称为 L 2 L_2 L2?范数。
惩罚 L 1 L_1 L1?范数会导致模型将权重集中在一小部分特征上, 而将其他权重清除为零, 这称为特征选择;惩罚 L 2 L_2 L2?范数会导致模型在大量特征上均匀分布权重,使得模型对单个变量的观测误差更为稳定。 - 通常不建议对偏置进行正则化,因为偏置的取值并不像权值那样会随着训练过程而变化,因此对偏置进行正则化对于控制模型的复杂度影响较小;另外,对偏置进行正则化可能会导致对数据中的偏移进行过度拟合,而减弱了模型对其他特征的学习。
2. 实例解析
2.1. 实例描述
使用以下公式生成包含20个样本的小训练集和100个样本的测试集,并用线性网络进行拟合: y = 0.05 + ∑ i = 1 200 0.01 x i + ? ?where? ? ~ N ( 0 , 0.0 1 2 ) . y = 0.05 + \sum_{i = 1}^{200} 0.01 x_i + \epsilon \text{ where } \epsilon \sim \mathcal{N}(0, 0.01^2). y=0.05+i=1∑200?0.01xi?+??where??~N(0,0.012).
2.2. 代码实现
2.2.1. 主要代码
optimizer = optim.SGD([
{"params": net.weight,"weight_decay": weight_decay},
{"params": net.bias}
], lr=lr)
2.2.2. 完整代码
import os
import torch
from torch import nn, optim
from torch.utils.data import TensorDataset, DataLoader
from tensorboardX import SummaryWriter
from rich.progress import track
def data_generator(w, b, num):
"""为线性模型生成数据"""
X = torch.randn(num, len(w))
y = torch.sum(X @ w, dim=1) + b
y += torch.normal(0, 0.01, y.shape)
return X, y.reshape(-1, 1)
def load_dataset(*tensors):
"""加载数据集"""
dataset = TensorDataset(*tensors)
return DataLoader(dataset, batch_size, shuffle=True)
def evaluate_loss(dataloader, net, criterion):
"""评估模型在指定数据集上的损失"""
num_examples = 0
loss_sum = 0.0
with torch.no_grad():
for X, y in dataloader:
X, y = X.cuda(), y.cuda()
loss = criterion(net(X), y)
num_examples += y.shape[0]
loss_sum += loss.sum()
return loss_sum / num_examples
if __name__ == '__main__':
# 全局参数设置
lr = 0.003
num_epochs = 100
batch_size = 5
# 创建记录器
def log_dir():
root = "runs"
if not os.path.exists(root):
os.mkdir(root)
order = len(os.listdir(root)) + 1
return f'{root}/exp{order}'
writer = SummaryWriter(log_dir=log_dir())
# 合成数据集
num_inputs = 200
n_train, n_test = 20, 100
true_w, true_b = torch.ones((num_inputs, 1)) * 0.01, 0.05
X, y = data_generator(true_w, true_b, n_train + n_test)
# 加载数据集
dataloader_train = load_dataset(X[:n_train], y[:n_train])
dataloader_test = load_dataset(X[n_train:], y[n_train:])
def loop(weight_decay):
# 定义模型
net = nn.Linear(num_inputs, 1).cuda()
nn.init.normal_(net.weight)
nn.init.constant_(net.bias, 0)
criterion = nn.MSELoss(reduction='none')
optimizer = optim.SGD([
{"params": net.weight,"weight_decay": weight_decay},
{"params": net.bias}
], lr=lr)
# 训练循环
for epoch in track(range(num_epochs), description=f'wd={weight_decay}'):
for X, y in dataloader_train:
X, y = X.cuda(), y.cuda()
loss = criterion(net(X), y)
optimizer.zero_grad()
loss.mean().backward()
optimizer.step()
writer.add_scalars(f'wd={weight_decay}', {
'train_loss': evaluate_loss(dataloader_train, net, criterion),
'test_loss': evaluate_loss(dataloader_test, net, criterion),
}, epoch)
for weight_decay in [0, 3]:
loop(weight_decay)
writer.close()
2.2.3. 输出结果
* weight_decay = 0

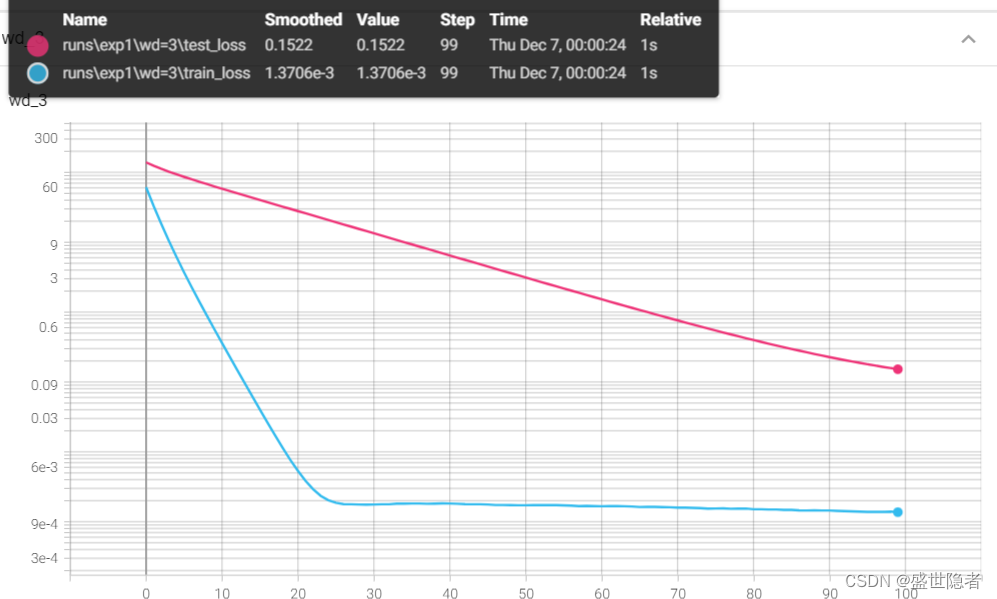
* weight_decay = 3
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!