机器人洞察:新鲜出炉的机器人领域最新研究,速戳!
原创 |文 BFT机器人?
随着科技的飞速发展,机器人技术已经渗透到我们生活的方方面面。在这篇文章中,我们将分享机器人在医疗援助、假肢、机器人灵活性、关节运动、工作表现、人工智能设计和家庭清洁等领域的最新进展。
01
协助护士工作的机器人
在医学界,来自德国的研究人员开发了一种机器人系统,旨在帮助护士减轻与病人护理相关的身体压力。护士在照顾卧床不起的病人时经常面临很高的体力要求,尤其是在重新安置病人的任务中。研究人员的工作是探索机器人技术如何通过远程将患者固定在侧位来协助完成这些任务。
结果表明,该系统平均改善了护士的工作姿势11.93%,被评为用户友好型机器人系统。该研究强调了机器人在医疗保健环境中支持护理人员的潜力,大大改善了护士的工作条件。
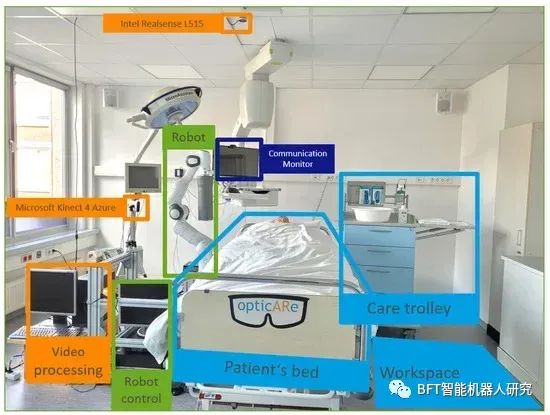
研究中使用的病房布置
02
增强仿生手部控制的机器人
最近,来自众多欧洲机构的研究人员在机器人假肢技术方面取得了重大突破,他们成功地将神经肌肉骨骼假肢植入了一个仿生手,并将其直接连接到了一个肘部以下截肢用户的神经和骨骼系统中。
这一成就涉及外科手术,将钛植入物放置在桡骨和尺骨中,并将切断的神经转移到游离肌肉移植物中。这些神经接口在假肢和用户身体之间提供了直接连接,从而改善了假肢的功能并提高了生活质量。他们的工作展示了高度集成的假肢设备的潜力,可以通过可靠的神经控制和舒适的日常使用体验来改善截肢者的生活。
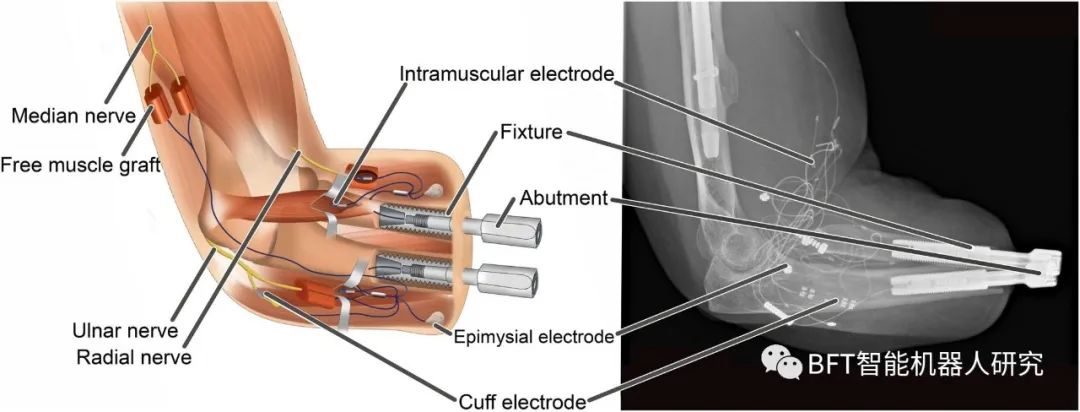
患者植入后的示意图和X光片
03
软体机器人中的强化学习
来自墨西哥国立理工学院和Autónoma de Coahuila大学的研究人员提出了一种方法,使用强化学习(RL)来控制一个气动驱动的软体机器人,而该机器人是以具有不同密度的连续介质为模型的。这种方法采用了连续时间的Actor-Critic方案,用于三维软机器人在Lipschitz干扰下的任务跟踪。
他们的研究引入了一种基于奖励的时间差异机制和一种针对系统Critic组件中神经权重的不连续自适应方法。总体目标是使RL能够控制软体机器人的复杂、不确定和可变形的性质,同时确保实时控制的稳定性,这是物理系统的关键要求。本研究的重点是RL在管理软体机器人带来的独特挑战中的应用。
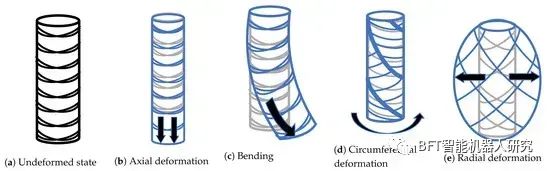
圆柱形柔性机器人的明显变形
04
青少年大小的人形机器人
在人机交互方面,德克萨斯大学奥斯汀分校以人为本的机器人实验室的研究人员推出了一款与Apptronik合作设计的名为DRACO 3的青少年人形机器人。
这款机器人专为人类环境中的实际应用而设计,其特点是近端驱动,下半身采用滚动接触机制,允许广泛的垂直姿势。研究人员已经开发了一种全身控制器(WBC)来管理DRACO 3的复杂传输。本研究为具有滚动接触关节的类人机器人的开发和控制提供了新的思路。
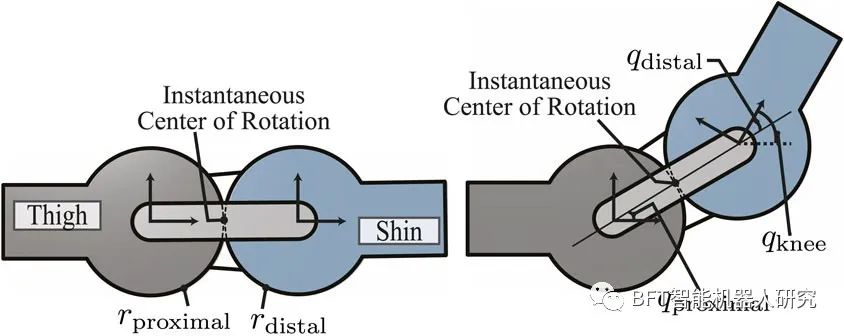
图示了膝盖处的滚动接触关节,初始配置(左)和后角位移(右)
05
机器人对个人工作效率的影响
柏林工业大学的研究人员调查了人机团队中的社会懒惰现象(社会懒惰指的是与单独工作相比,个人在团队环境下的努力减少)。
这项研究让参与者检查电路板是否有缺陷,一组单独工作,另一组与机器人搭档工作。尽管有一个可靠的机器人可以标记出电路板上的缺陷,但与机器人一起工作的参与者识别出的缺陷比单独工作的参与者要少,这表明在人机团队中可能会出现社会懒惰。这项研究揭示了与人机协作相关的挑战及其对个人努力和表现的影响。
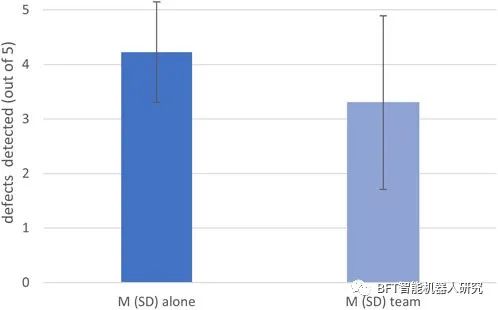
单独工作与机器人工作的结果对比
06
由人工智能设计的机器人
西北大学的研究人员开发了一种人工智能系统,可以从零开始设计机器人,使其能够在几秒钟内创造出一个行走的机器人,而这项任务在自然演变中则需要数十亿年的进化。
该人工智能系统在一台轻量级个人电脑上运行,不依赖于耗能巨大的超级计算机或大型数据集,提供了快速设计具有独特形式的机器人的潜力。该系统通过迭代设计,评估其缺陷,并在几秒钟内完善结构来工作。它为人工智能设计的工具的新时代铺平了道路,这些工具能够直接作用于世界上的各种应用。

3D打印设计机器人
07
用于家庭整理的可定制机器人
在家用机器人领域,来自斯坦福大学、普林斯顿大学、哥伦比亚大学和谷歌的研究人员开发了TidyBot,这是一种单臂机器人,可以根据个人喜好清洁空间。
TidyBot使用一个经过互联网数据训练的大型语言模型来识别各种物体,并了解将它们放在哪里,这使得它可以根据不同的偏好进行高度定制,在实际测试中,机器人可以正确收起大约85%的物品。虽然TidyBot仍有改进的余地,但研究人员相信,它有望使机器人在家庭和其他环境中更加通用和有用。

机器人接受训练的场景
若您对该文章内容有任何疑问,请与我们联系,我们将及时回应。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!