【PyTorch】现代卷积神经网络
2023-12-15 11:48:04
1. 理论介绍
1.1. 深度卷积神经网络(AlexNet)
1.1.1. 概述
- 特征本身应该被学习,而且在合理地复杂性前提下,特征应该由多个共同学习的神经网络层组成,每个层都有可学习的参数。在机器视觉中,最底层可能检测边缘、颜色和纹理,更高层建立在这些底层表示的基础上,以表示更大的特征。
- 包含许多特征的深度模型需要大量的有标签数据,才能显著优于基于凸优化的传统方法(如线性方法和核方法)。ImageNet挑战赛为研究人员提高超大规模的数据集。
- 深度学习对计算资源要求很高,训练可能需要数百个迭代轮数,每次迭代都需要通过代价高昂的许多线性代数层传递数据。用GPU训练神经网络大大提高了训练速度,相比于CPU,GPU由100~1000个小的处理单元(核心)组成,庞大的核心数量使GPU比CPU快几个数量级;GPU核心更简单,功耗更低;GPU拥有更高的内存带宽;卷积和矩阵乘法,都是可以在GPU上并行化的操作。
- AlexNet首次证明了学习到的特征可以超越手工设计的特征。
1.1.2. 模型设计
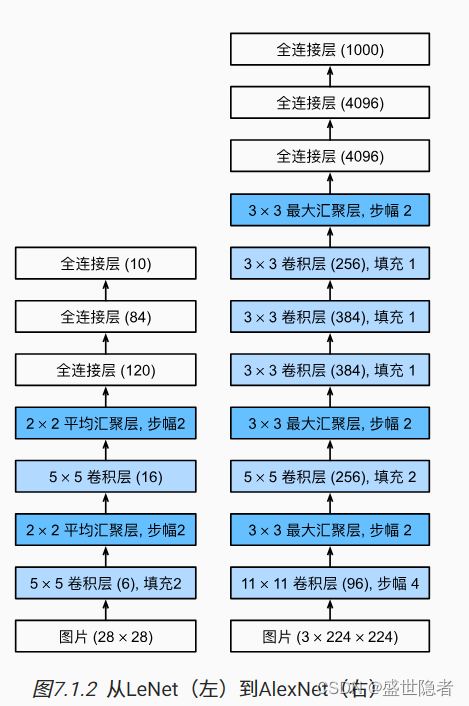
- AlexNet使用ReLU而不是sigmoid作为其激活函数。
- 在最后一个卷积层后有两个全连接层,分别有4096个输出。 这两个巨大的全连接层拥有将近1GB的模型参数。 由于早期GPU显存有限,原版的AlexNet采用了双数据流设计,使得每个GPU只负责存储和计算模型的一半参数。
- AlexNet通过暂退法控制全连接层的模型复杂度。
- 为了进一步扩充数据,AlexNet在训练时增加了大量的图像增强数据,如翻转、裁切和变色。 这使得模型更健壮,更大的样本量有效地减少了过拟合。
1.2. 使用块的网络(VGG)
- 经典卷积神经网络的基本组成部分
- 带填充以保持分辨率的卷积层
- 非线性激活函数
- 池化层
- VGG块由一系列卷积层组成,后面再加上用于空间下采样的最大池化层。深层且窄的卷积(即 3 × 3 3\times3 3×3)比较浅层且宽的卷积更有效。不同的VGG模型可通过每个VGG块中卷积层数量和输出通道数量的差异来定义。
- VGG网络由几个VGG块和全连接层组成。超参数变量
conv_arch指定了每个VGG块里卷积层个数和输出通道数。全连接模块则与AlexNet中的相同。 - VGG-11有5个VGG块,其中前两个块各有一个卷积层,后三个块各包含两个卷积层,共8个卷积层。 第一个模块有64个输出通道,每个后续模块将输出通道数量翻倍,直到该数字达到512。
1.3. 网络中的网络(NiN)
- 网络中的网络(NiN)在每个像素的通道上分别使用多层感知机。
- NiN块以一个普通卷积层开始,后面是两个 1 × 1 1\times1 1×1的卷积层。这两个 1 × 1 1\times1 1×1卷积层充当带有ReLU激活函数的逐像素全连接层。
- NiN网络使用窗口形状为 11 × 11 11\times11 11×11、 5 × 5 5\times5 5×5和 3 × 3 3\times3 3×3的卷积层,输出通道数量与AlexNet中的相同。 每个NiN块后有一个最大池化层,池化窗口形状为 3 × 3 3\times3 3×3,步幅为2。 NiN和AlexNet之间的一个显著区别是NiN完全取消了全连接层。NiN使用一个NiN块,其输出通道数等于标签类别的数量。最后放一个全局平均池化层,生成一个对数几率 (logits)。
- 移除全连接层可减少过拟合,同时显著减少NiN的参数。
1.4. 含并行连结的网络(GoogLeNet)
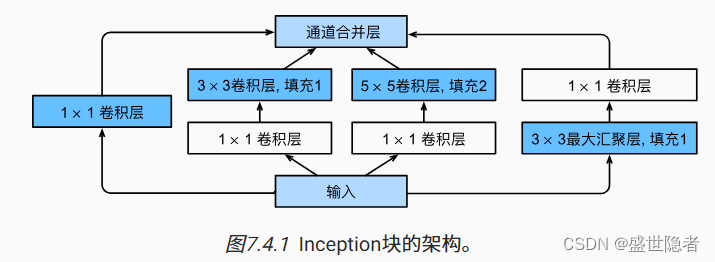
- 使用不同大小的卷积核组合是有利的,因为可以有效地识别不同范围的图像细节。
- Inception块由四条并行路径组成。四条路径都使用合适的填充来使输入与输出的高和宽一致。超参数是每层输出通道数。
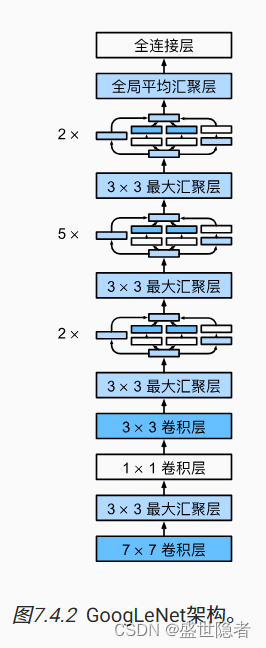
- GoogLeNet一共使用9个Inception块和全局平均汇聚层的堆叠来生成其估计值。Inception块之间的最大汇聚层可降低维度。
1.5. 批量规范化
- 批量规范化可持续加速深层网络的收敛速度。在模型训练过程中,批量规范化利用小批量的均值和标准差,不断调整神经网络的中间输出,使整个神经网络各层的中间输出值更加稳定。
- 数据预处理的方式通常会对最终结果产生巨大影响。
- 中间层中的变量分布偏移可能会阻碍网络的收敛。
- 更深层的网络很复杂,容易过拟合。 这意味着正则化变得更加重要。
- 在每次训练迭代中,我们首先规范化输入,即通过减去其均值并除以其标准差,其中两者均基于当前小批量处理。 接下来,我们应用比例系数和比例偏移。
- 只有使用足够大的小批量,批量规范化这种方法才是有效且稳定的。如果我们尝试使用大小为1的小批量应用批量规范化,我们将无法学到任何东西。 这是因为在减去均值之后,每个隐藏单元将为0。
- 批量标准化公式 B N ( x ) = γ ⊙ x ? μ ^ B σ ^ B + β , x ∈ B \mathrm{BN}(\mathbf{x}) = \boldsymbol{\gamma} \odot \frac{\mathbf{x} - \hat{\boldsymbol{\mu}}_\mathcal{B}}{\hat{\boldsymbol{\sigma}}_\mathcal{B}} + \boldsymbol{\beta}, \mathbf{x}\in \mathcal{B} BN(x)=γ⊙σ^B?x?μ^?B??+β,x∈B其中拉伸参数 γ \boldsymbol{\gamma} γ和偏移参数 β \boldsymbol{\beta} β是待学习的参数。 应用标准化后,生成的小批量的平均值为0和单位方差为1。
- 我们在方差估计值中添加一个小的常量 ? > 0 \epsilon > 0 ?>0,以确保我们永远不会尝试除以零。
- 批量规范化最适应50~100范围中的中等批量大小。
- 批量规范化层在训练模式通过小批量统计数据规范化,在预测模式通过利用移动平均估计对整个训练集统计规范化。
- 我们将批量规范化层置于全连接层中的仿射变换和激活函数之间。
- 我们可以在卷积层之后和非线性激活函数之前应用批量规范化。 当卷积有多个输出通道时,我们需要对这些通道的每个输出执行批量规范化,每个通道都有自己的拉伸和偏移参数,这两个参数都是标量。
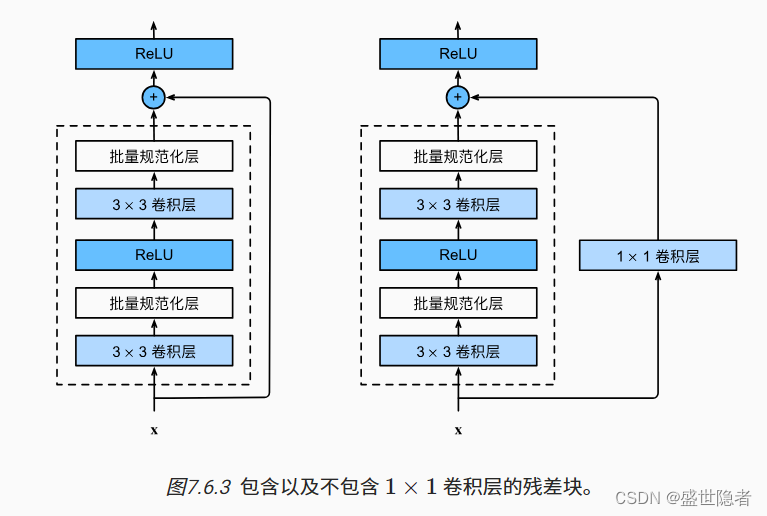
1.6. 残差网络(ResNet)
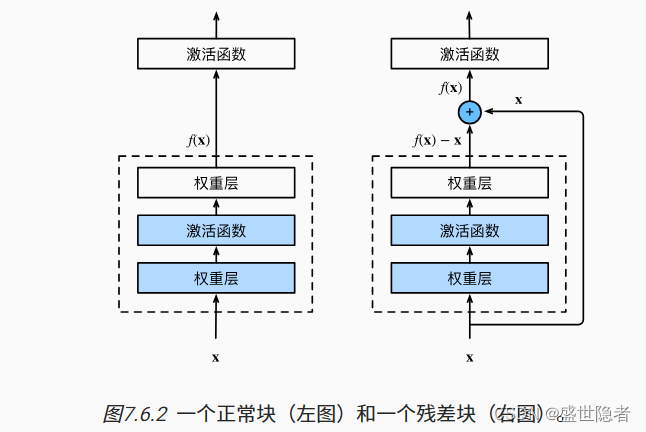
- 只有当较复杂的函数类包含较小的函数类时,我们才能确保提高它们的性能。
- 对于深度神经网络,如果我们能将新添加的层训练成恒等映射 f ( x ) = x f(\mathbf{x})=\mathbf{x} f(x)=x,新模型和原模型将同样有效。同时,由于新模型可能得出更优的解来拟合训练数据集,因此添加层似乎更容易降低训练误差。
- 残差网络的核心思想是:每个附加层都应该更容易地包含原始函数作为其元素之一。
- 残差块
- 输入可以通过层间的残余连接更快地向前传播。
1.7. 稠密连接网络(DenseNet)
- ResNet将
f
(
x
)
f(\mathbf{x})
f(x)展开为
f
(
x
)
=
x
+
g
(
x
)
f(\mathbf{x})=\mathbf{x}+g(\mathbf{x})
f(x)=x+g(x),DenseNet将
f
(
x
)
f(\mathbf{x})
f(x)展开成超过两部分,DenseNet输出是连接。
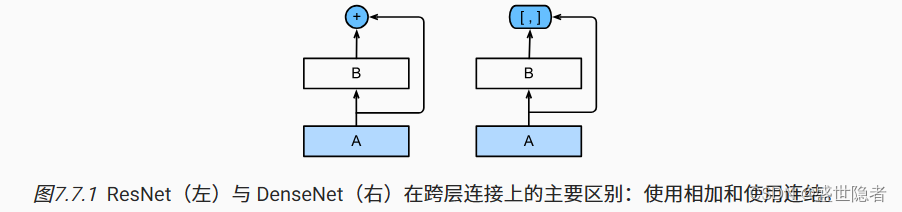
- 稠密网络主要由稠密块和过渡层构成。 前者定义如何连接输入和输出,而后者则控制通道数量,使其不会太复杂。
- 稠密块由多个卷积块组成,每个卷积块使用相同数量的输出通道。 然而,在前向传播中,我们将每个卷积块的输入和输出在通道维上连结。卷积块的通道数控制了输出通道数相对于输入通道数的增长,因此也被称为增长率。
- 过渡层通过 1 × 1 1\times1 1×1卷积层来减小通道数,并使用步幅为2的平均汇聚层减半高和宽,从而进一步降低模型复杂度。
2. 实例解析
2.1. 实例描述
- 在FashionMNIST数据集上训练AlexNet。注:输入图像调整到 224 × 224 224\times224 224×224,不使用跨GPU分解模型。
- 在FashionMNIST数据集上训练VGG-11。注:输入图像调整到 224 × 224 224\times224 224×224,可以按比例缩小通道数以减少参数量,学习率可以设置得略高。
- 在FashionMNIST数据集上训练NiN。注:输入图像调整到 224 × 224 224\times224 224×224。
- 在FashionMNIST数据集上训练GoogLeNet。注:输入图像调整到 96 × 96 96\times96 96×96。
- 在FashionMNIST数据集上训练加入批量规范化层的LeNet。注:学习率可以设置得略高。
- 在Fashion-MNIST数据集上训练ResNet-18。注:输入图像调整到 96 × 96 96\times96 96×96。
- 在Fashion-MNIST数据集上训练DenseNet。注:输入图像调整到 96 × 96 96\times96 96×96。
2.2. 代码实现
2.2.1. 在FashionMNIST数据集上训练模型
import os
from tensorboardX import SummaryWriter
from alive_progress import alive_bar
import torch
from torch import nn, optim
from torch.utils.data import DataLoader
from torchvision.transforms import Compose, ToTensor, Resize
from torchvision.datasets import FashionMNIST
def load_dataset(size):
"""加载数据集"""
root = "./dataset"
if size is None:
transform = Compose([ToTensor()])
else:
transform = Compose([Resize(size), ToTensor()])
mnist_train = FashionMNIST(root, True, transform, download=True)
mnist_test = FashionMNIST(root, False, transform, download=True)
dataloader_train = DataLoader(mnist_train, batch_size, shuffle=True,
num_workers=num_workers, pin_memory=True,
)
dataloader_test = DataLoader(mnist_test, batch_size, shuffle=False,
num_workers=num_workers, pin_memory=True,
)
return dataloader_train, dataloader_test
def train_on_FashionMNIST(title, size=None):
"""在FashionMNIST数据集上训练指定模型"""
# 创建记录器
def log_dir():
root = "runs"
if not os.path.exists(root):
os.mkdir(root)
order = len(os.listdir(root)) + 1
return f'{root}/exp{order}'
writer = SummaryWriter(log_dir=log_dir())
# 数据集配置
dataloader_train, dataloader_test = load_dataset(size)
# 模型配置
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
nn.init.zeros_(m.bias)
net.apply(init_weights)
criterion = nn.CrossEntropyLoss(reduction='none')
optimizer = optim.SGD(net.parameters(), lr=lr)
# 训练循环
metrics_train = torch.zeros(3, device=device) # 训练损失、训练准确度、样本数
metrics_test = torch.zeros(2, device=device) # 测试准确度、样本数
with alive_bar(num_epochs, theme='classic', title=title) as bar:
for epoch in range(num_epochs):
net.train()
for X, y in dataloader_train:
X, y = X.to(device, non_blocking=True), y.to(device, non_blocking=True)
loss = criterion(net(X), y)
optimizer.zero_grad()
loss.mean().backward()
optimizer.step()
net.eval()
with torch.no_grad():
metrics_train.zero_()
for X, y in dataloader_train:
X, y = X.to(device, non_blocking=True), y.to(device, non_blocking=True)
y_hat = net(X)
loss = criterion(y_hat, y)
metrics_train[0] += loss.sum()
metrics_train[1] += (y_hat.argmax(dim=1) == y).sum()
metrics_train[2] += y.numel()
metrics_train[0] /= metrics_train[2]
metrics_train[1] /= metrics_train[2]
metrics_test.zero_()
for X, y in dataloader_test:
X, y = X.to(device, non_blocking=True), y.to(device, non_blocking=True)
y_hat = net(X)
metrics_test[0] += (y_hat.argmax(dim=1) == y).sum()
metrics_test[1] += y.numel()
metrics_test[0] /= metrics_test[1]
_metrics_train = metrics_train.cpu().numpy()
_metrics_test = metrics_test.cpu().numpy()
writer.add_scalars('metrics', {
'train_loss': _metrics_train[0],
'train_acc': _metrics_train[1],
'test_acc': _metrics_test[0]
}, epoch)
bar()
writer.close()
2.2.2. 模型设置
2.2.2.1. AlexNet
if __name__ == "__main__":
# 全局参数设置
num_epochs = 10
batch_size = 128
num_workers = 3
lr = 0.01
device = torch.device('cuda')
# 模型配置
net = nn.Sequential(
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(96, 256, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(256, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 10)
).to(device, non_blocking=True)
train_on_FashionMNIST('AlexNet', 224)
2.2.2.2. VGG-11
if __name__ == '__main__':
# 全局参数配置
num_epochs = 10
batch_size = 128
num_workers = 3
lr = 0.1
device = torch.device('cuda')
# 模型配置
def vgg_block(num_convs, in_channels, out_channels):
"""定义VGG块"""
layers = []
for _ in range(num_convs):
layers.append(nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))
layers.append(nn.ReLU())
in_channels = out_channels
layers.append(nn.MaxPool2d(kernel_size=2, stride=2))
return nn.Sequential(*layers)
def vgg(conv_arch):
"""定义VGG网络"""
vgg_blocks = []
in_channels = 1
out_channels = 0
for num_convs, out_channels in conv_arch:
vgg_blocks.append(vgg_block(num_convs, in_channels, out_channels))
in_channels = out_channels
return nn.Sequential(
*vgg_blocks,
nn.Flatten(),
nn.Linear(out_channels * 7 * 7, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 10),
)
ratio = 4
conv_arch = ((1, 64), (1, 128), (2, 256), (2, 512), (2, 512))
small_conv_arch = [(pair[0], pair[1] // ratio) for pair in conv_arch]
net = vgg(small_conv_arch).to(device, non_blocking=True)
# 在FashionMNIST数据集上训练模型
train_on_FashionMNIST('VGG', 224)
2.2.2.3. NiN
if __name__ == '__main__':
# 全局参数配置
num_epochs = 10
batch_size = 128
num_workers = 3
lr = 0.1
device = torch.device('cuda')
# 模型配置
def nin_block(in_channels, out_channels, kernel_size, strides, padding):
"""定义NiN块"""
return nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size, strides, padding), nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU()
)
net = nn.Sequential(
nin_block(1, 96, kernel_size=11, strides=4, padding=0),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(96, 256, kernel_size=5, strides=1, padding=2),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(256, 384, kernel_size=3, strides=1, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Dropout(0.5),
nin_block(384, 10, kernel_size=3, strides=1, padding=1),
nn.AdaptiveAvgPool2d((1, 1)),
nn.Flatten()
).to(device, non_blocking=True)
# 在FashionMNIST数据集上训练模型
train_on_FashionMNIST('NiN', 224)
2.2.2.4. GoogLeNet
if __name__ == '__main__':
# 全局参数配置
num_epochs = 10
batch_size = 128
num_workers = 3
lr = 0.1
device = torch.device('cuda')
# 模型配置
class Inception(nn.Module):
# c1--c4是每条路径的输出通道数
def __init__(self, in_channels, c1, c2, c3, c4, **kwargs):
super(Inception, self).__init__(**kwargs)
# 线路1,单1x1卷积层
self.p1_1 = nn.Conv2d(in_channels, c1, kernel_size=1)
# 线路2,1x1卷积层后接3x3卷积层
self.p2_1 = nn.Conv2d(in_channels, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1x1卷积层后接5x5卷积层
self.p3_1 = nn.Conv2d(in_channels, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3x3最大汇聚层后接1x1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_channels, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
# 在通道维度上连结输出
return torch.cat((p1, p2, p3, p4), dim=1)
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1),
nn.ReLU(),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten())
net = nn.Sequential(
b1, b2, b3, b4, b5,
nn.Linear(1024, 10)
).to(device, non_blocking=True)
# 在FashionMNIST数据集上训练模型
train_on_FashionMNIST('GoogLeNet', 96)
2.2.2.5. 加入批量规范化层的LeNet
if __name__ == '__main__':
# 全局参数设置
num_epochs = 10
batch_size = 256
num_workers = 3
lr = 1.0
device = torch.device('cuda')
# 模型配置
net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5), nn.BatchNorm2d(6), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.BatchNorm2d(16), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), nn.Flatten(),
nn.Linear(256, 120), nn.BatchNorm1d(120), nn.Sigmoid(),
nn.Linear(120, 84), nn.BatchNorm1d(84), nn.Sigmoid(),
nn.Linear(84, 10)
).to(device, non_blocking=True)
train_on_FashionMNIST('LeNet_BN')
2.2.2.6. ResNet
if __name__ == '__main__':
# 全局参数设置
num_epochs = 10
batch_size = 256
num_workers = 3
lr = 0.05
device = torch.device('cuda')
# 模型配置
class Residual(nn.Module):
def __init__(self, input_channels, num_channels,
use_1x1conv=False, strides=1):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels,
kernel_size=3, padding=1, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels,
kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels, num_channels,
kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
def resnet_block(input_channels, num_channels, num_residuals,
first_block=False):
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(input_channels, num_channels,
use_1x1conv=True, strides=2))
else:
blk.append(Residual(num_channels, num_channels))
return blk
b1 = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
b2 = nn.Sequential(*resnet_block(64, 64, 2, first_block=True))
b3 = nn.Sequential(*resnet_block(64, 128, 2))
b4 = nn.Sequential(*resnet_block(128, 256, 2))
b5 = nn.Sequential(*resnet_block(256, 512, 2))
net = nn.Sequential(
b1, b2, b3, b4, b5,
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten(), nn.Linear(512, 10)
).to(device, non_blocking=True)
train_on_FashionMNIST('ResNet', 96)
2.2.2.7. DenseNet
if __name__ == '__main__':
# 全局参数设置
num_epochs = 10
batch_size = 256
num_workers = 3
lr = 0.1
device = torch.device('cuda')
# 模型配置
def conv_block(input_channels, num_channels):
return nn.Sequential(
nn.BatchNorm2d(input_channels), nn.ReLU(),
nn.Conv2d(input_channels, num_channels, kernel_size=3, padding=1)
)
class DenseBlock(nn.Module):
def __init__(self, num_convs, input_channels, num_channels):
super(DenseBlock, self).__init__()
layer = []
for i in range(num_convs):
layer.append(conv_block(
num_channels * i + input_channels, num_channels))
self.net = nn.Sequential(*layer)
def forward(self, X):
for blk in self.net:
Y = blk(X)
# 连接通道维度上每个块的输入和输出
X = torch.cat((X, Y), dim=1)
return X
def transition_block(input_channels, num_channels):
return nn.Sequential(
nn.BatchNorm2d(input_channels), nn.ReLU(),
nn.Conv2d(input_channels, num_channels, kernel_size=1),
nn.AvgPool2d(kernel_size=2, stride=2)
)
b1 = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
# num_channels为当前的通道数
num_channels, growth_rate = 64, 32
num_convs_in_dense_blocks = [4, 4, 4, 4]
blks = []
for i, num_convs in enumerate(num_convs_in_dense_blocks):
blks.append(DenseBlock(num_convs, num_channels, growth_rate))
# 上一个稠密块的输出通道数
num_channels += num_convs * growth_rate
# 在稠密块之间添加一个转换层,使通道数量减半
if i != len(num_convs_in_dense_blocks) - 1:
blks.append(transition_block(num_channels, num_channels // 2))
num_channels = num_channels // 2
net = nn.Sequential(
b1, *blks,
nn.BatchNorm2d(num_channels), nn.ReLU(),
nn.AdaptiveAvgPool2d((1, 1)),
nn.Flatten(),
nn.Linear(num_channels, 10)
).to(device, non_blocking=True)
train_on_FashionMNIST('DenseNet', 96)
2.2.3. 输出结果
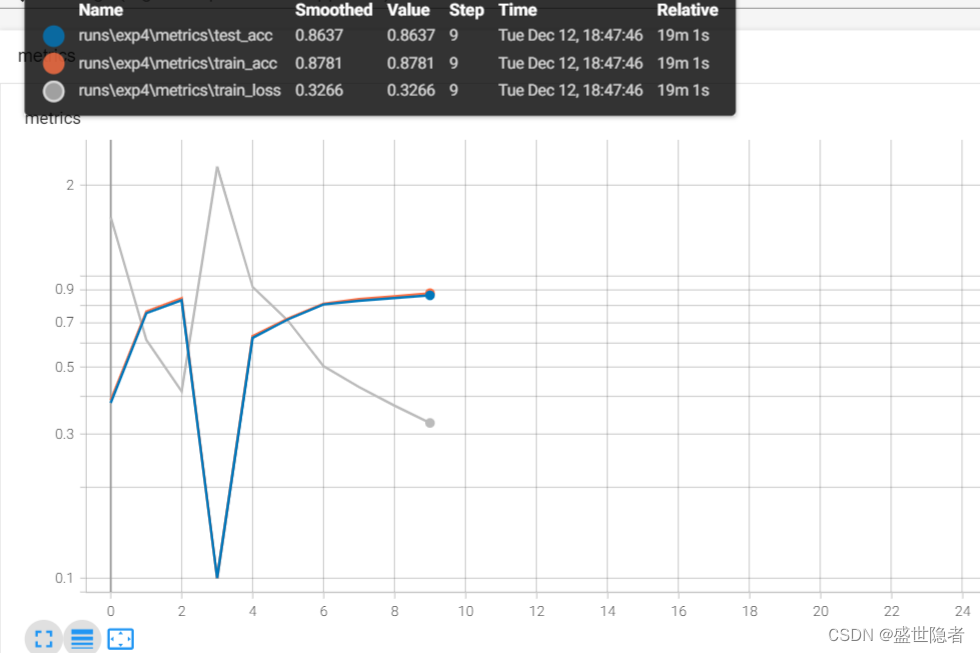
2.2.3.1. AlexNet

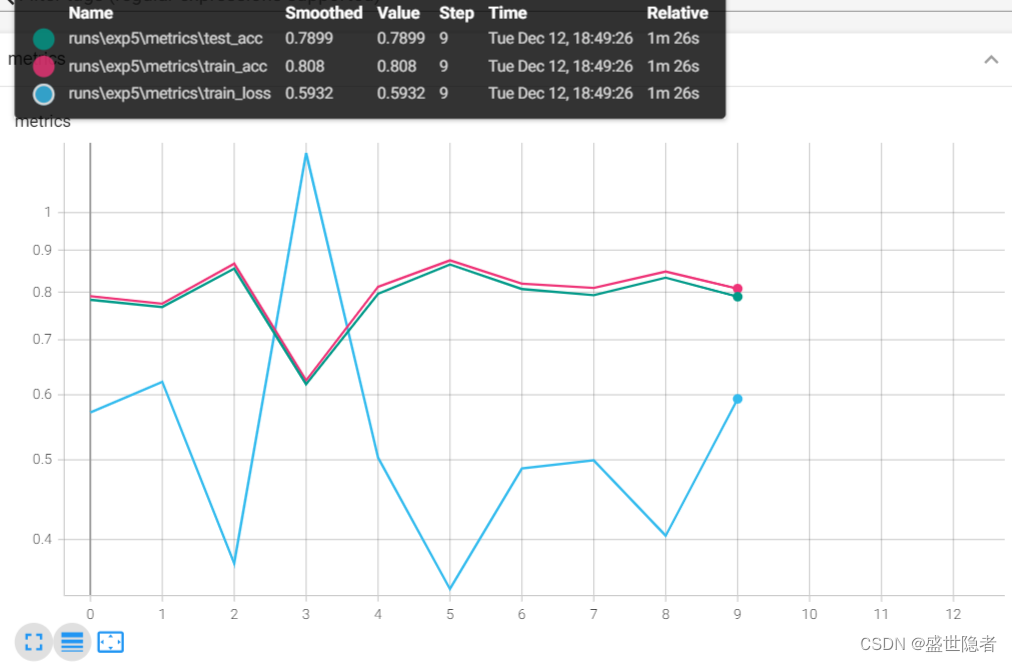
2.2.3.2. VGG-11
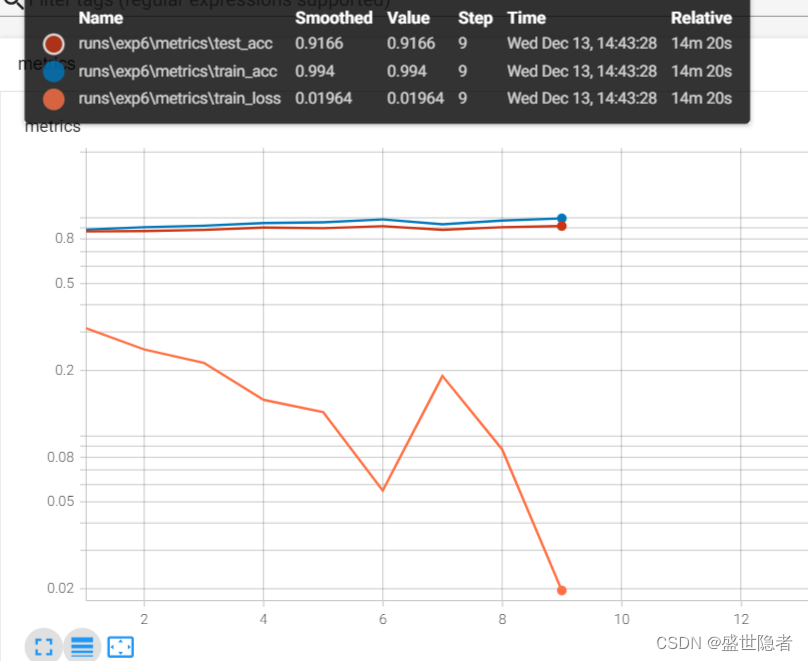
2.2.3.3. NiN
2.2.3.4. GoogLeNet
2.2.3.5. 加入批量规范化层的LeNet
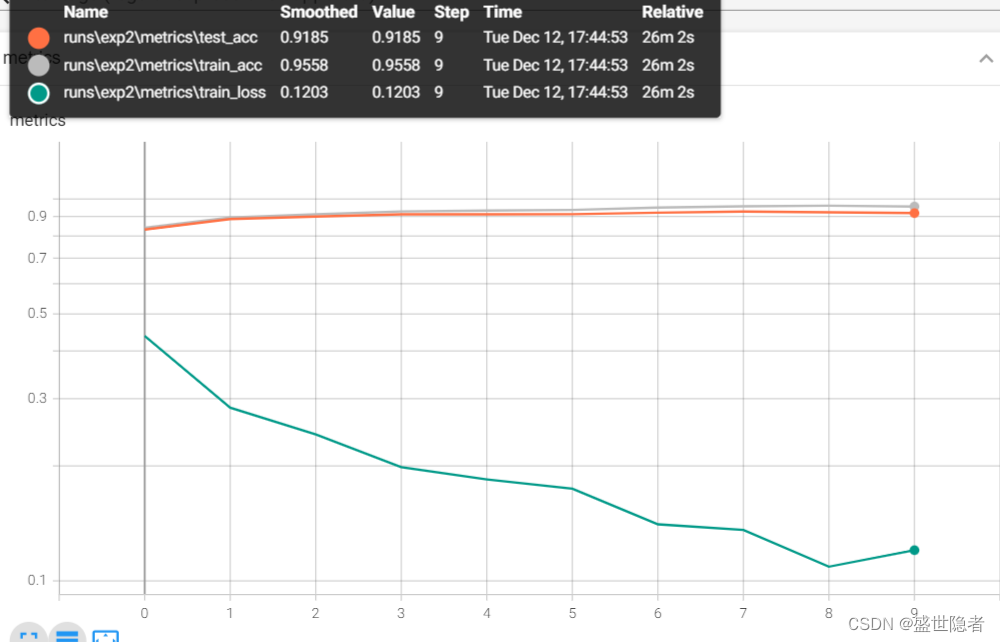
2.2.3.6. ResNet
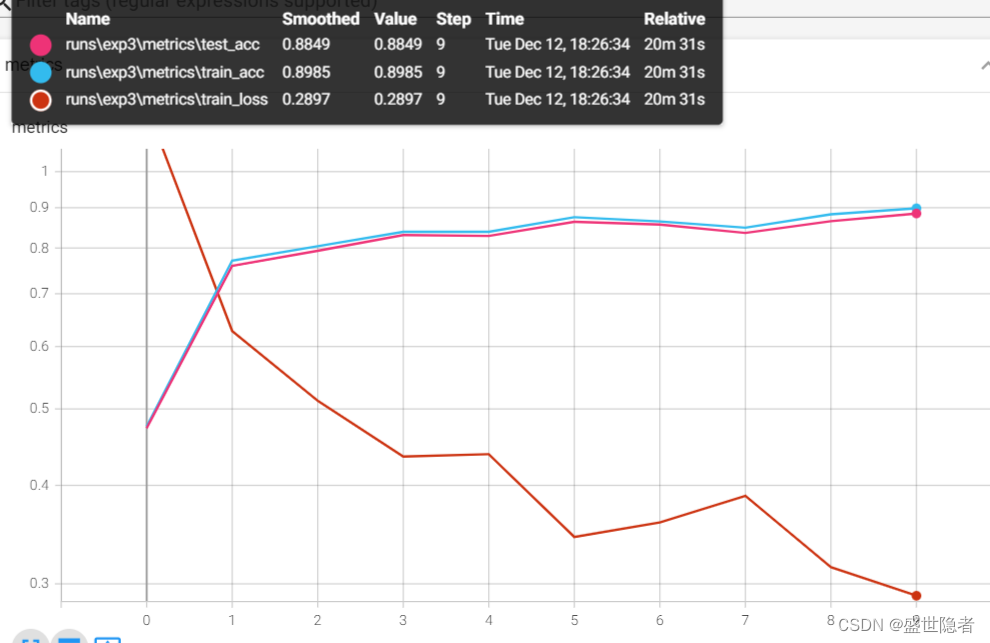
2.2.3.7. DenseNet

文章来源:https://blog.csdn.net/weixin_45725295/article/details/134921829
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!