嵌入式-stm32-用PWM点亮LED实现呼吸灯
一:知识前置
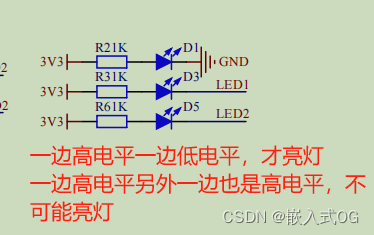
1.1、LED灯怎么才能亮?
答:LED需要低电平才能亮,高电平是灯灭。
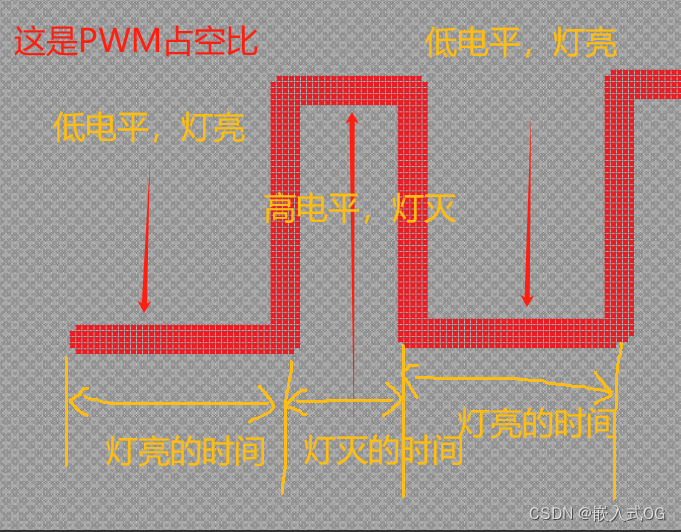
1.2、LED灯为什么可以越来越亮,越来越暗?
答:这是用到不同占空比来实现的,控制LED实现呼吸灯,就是通过占空比的高低电平和其持续时间来实现。
1.3、如何计算周期/频率?

①例如,要定时500ms,则:PSC=7199,ARR=4999,Tclk=72Mhz。

②假如频率为 2kHz ,则:PSC=71,ARR=499,
频率和周期是描述波形的两个基本概念,它们之间存在着确定的数学关系。频率是指在单位时间内信号中所包含的周期个数,单位为赫兹(Hz),周期则是每个完整波形所用的时间,单位为秒(s)。
频率 = 1 ÷ 周期
周期 = 1 ÷ 频率
2khz=1/2000s

1.4、PWM介绍
STM32F103C8T6 PWM资源
高级定时器(TIM1):7路
通用定时器(TIM2-TIM4):各4路
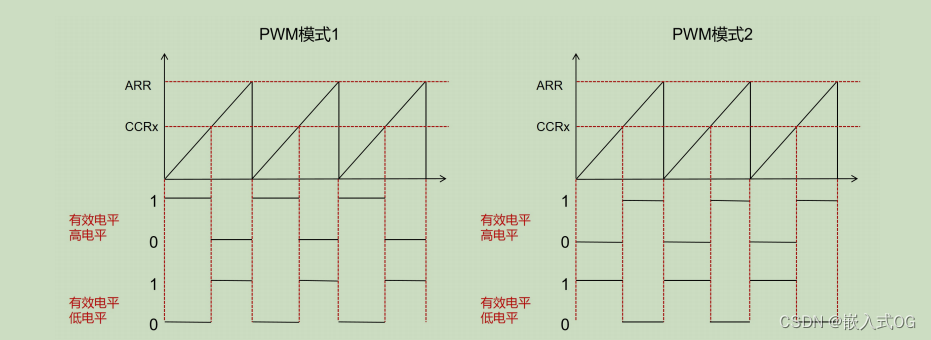
pwm输出模式(硬件规定,这是游戏规则,记住就好):
横坐标是CNT
pwm模式1:在向上计数时,一旦CNT<CCRx时输出为有效电平,否则为无效电平;
在向下计数时,一旦CNT>CCRx时输出为无效电平,否则为有效电平。
pwm模式2:在向上计数时,一旦CNT<CCRx时输出为无效电平,否则为有效电平;
在向下计数时,一旦CNT>CCRx时输出为有效电平,否则为无效电平。
这里CNT和CCRx比较的时间长度就是占空比的持续时间长度(横坐标的长度)。
所以上文总结下来一句话:PWM占空比是由TIMx_CCRx寄存器决定。
1.5、那么CCRx寄存器是什么?
答:在嵌入式系统中,PWM(脉冲宽度调制)是一种常见的控制技术,用于产生模拟信号或控制电机、灯光等设备。CCR(Capture/Compare Register)寄存器是与PWM相关的一种寄存器,用于设置比较值或捕获值。
在PWM模块中,CCR寄存器通常用于存储用于比较的值。对于基于比较的PWM模式,CCR寄存器的值将与定时器计数器的值进行比较,以确定何时改变PWM输出的状态。另外,在输入捕获模式中,CCR寄存器可以用于存储捕获到的定时器计数器的值。
总之,CCR寄存器在PWM模块中扮演着关键的角色,用于控制PWM波形的生成和捕获。
二:实验-用PWM点亮LED实现呼吸灯(hal库)
2.1、需求:使用PWM点亮LED1实现呼吸灯效果。
呼吸灯效果:呼吸灯效果的原理是通过改变光源的亮度来实现。
光源会在一个周期内逐渐从低亮度到高亮度再到低亮度的循环变化。这个周期可以根据具体需求进行调整,通常在几秒钟到几十秒之间。**简单来说就是灯从暗到亮,从亮到暗,只是两者持续的时间可以控制,这个时间就是由占空比也就是PWM控制。**
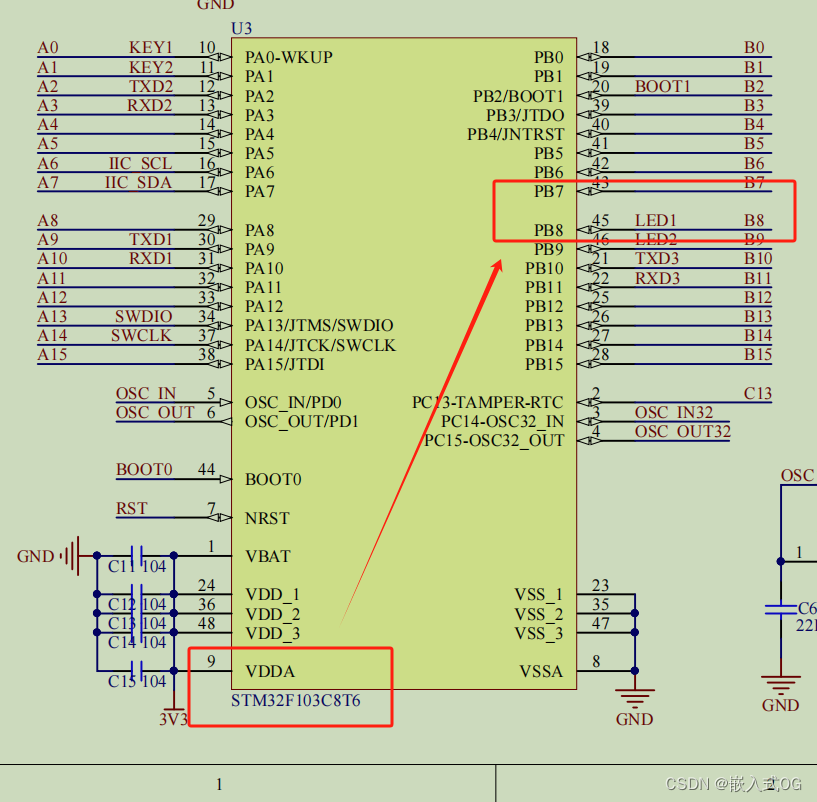
2.2、读芯片引脚原理图
找LED灯是哪个引脚控制,如图右侧PB8
2.3、学会看产品手册
LED1连接到哪个定时器的哪一路?
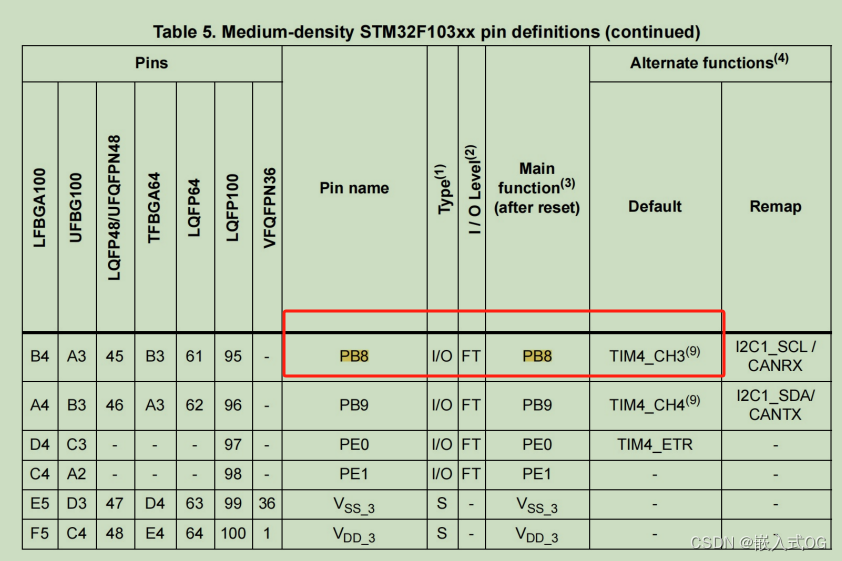
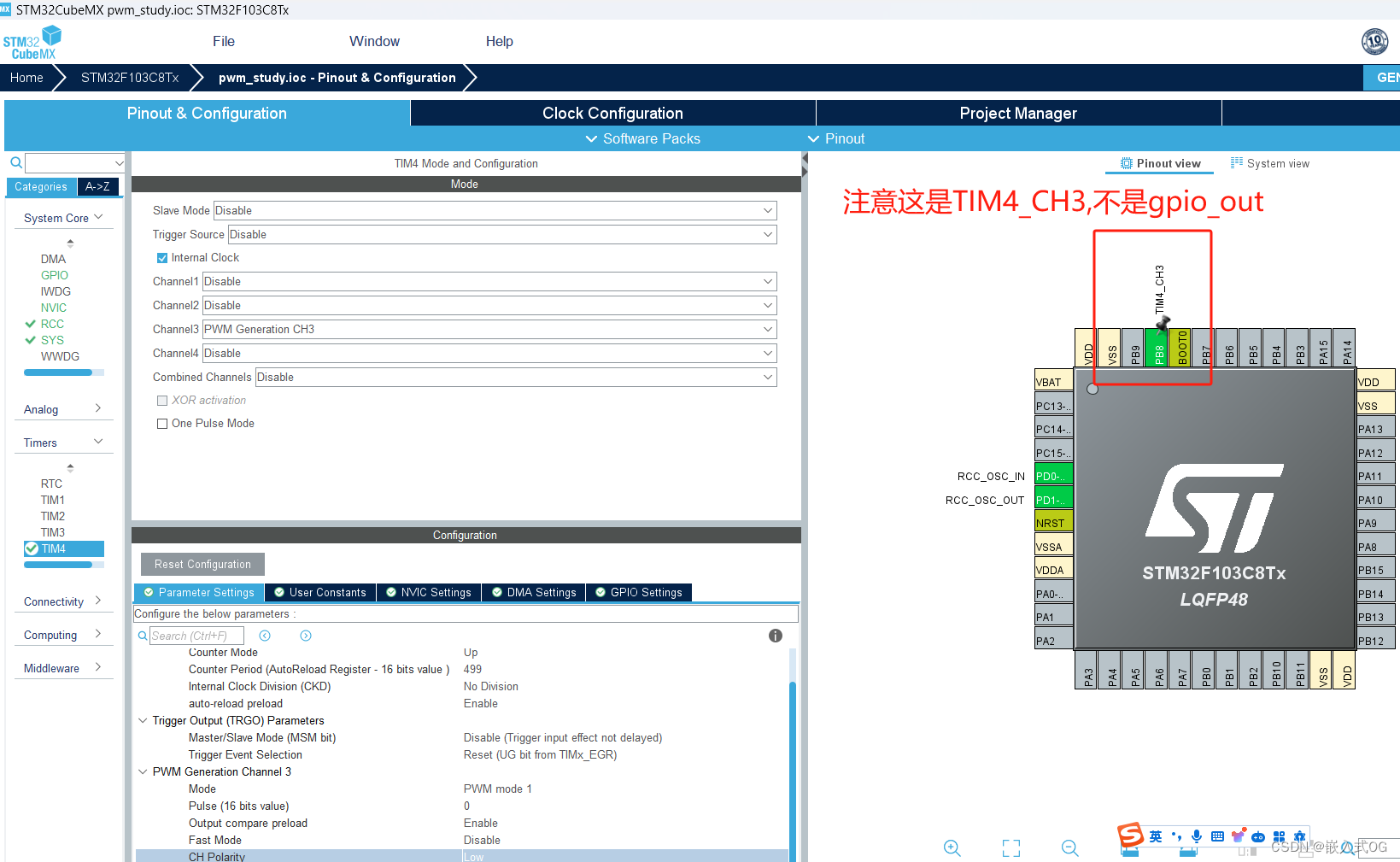
由STM32F103xx产品手册可以知道引脚PB8是由定时器TIM4的第三个通道3决定的.
这是强大的hal库帮我们封装好的,我们会调用就行了
温馨提示:STM近年来主推且不断更新HAI库和LL库,反而标准库已经好几年不更新了,这样子用stm板子开发速度很快,就是换国产芯片做产品时还是得用标准库
//修改比较值,修改占空比
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, pwmVal);
在这段代码中,`pwmVal`代表着PWM信号的占空比(Duty Cycle)。
占空比是指高电平时间与周期之比,通常以百分比表示。在使用脉冲宽度调制(PWM)技术控制光源亮度或执行其他需要精确控制的任务时,可以通过修改占空比来调整输出信号的特性。
`__HAL_TIM_SetCompare()`函数是针对STM32系列微控制器的HAL库函数,用于设置定时器的比较值,从而改变PWM信号的占空比。
具体而言,`&htim4`表示对定时器4进行操作,`TIM_CHANNEL_3`表示选择第3个通道(channel),而`pwmVal`则是要设置的占空比值。
通过修改`pwmVal`的数值,可以调整PWM信号的占空比,进而控制光源的亮度或其他相关功能。
通常,当`pwmVal`为0时,输出信号的占空比为0%,即完全低电平;当`pwmVal`为最大值时,输出信号的占空比为100%,即完全高电平;在中间取值,则可以实现不同亮度或特定需求下的占空比控制。
三:stm32CubeMX实现步骤以及细节
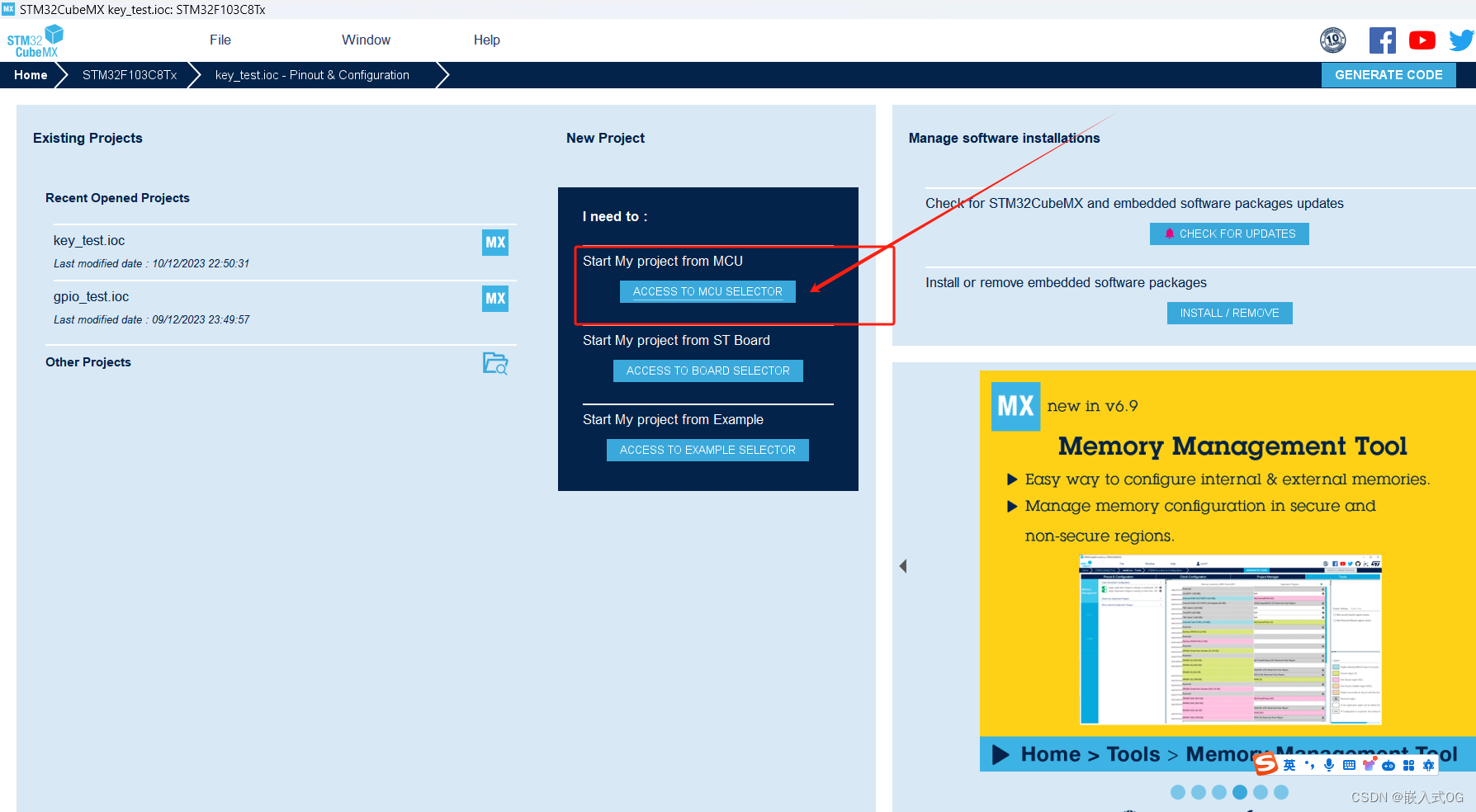
3.1、打开Stm32CubeMX,界面如图
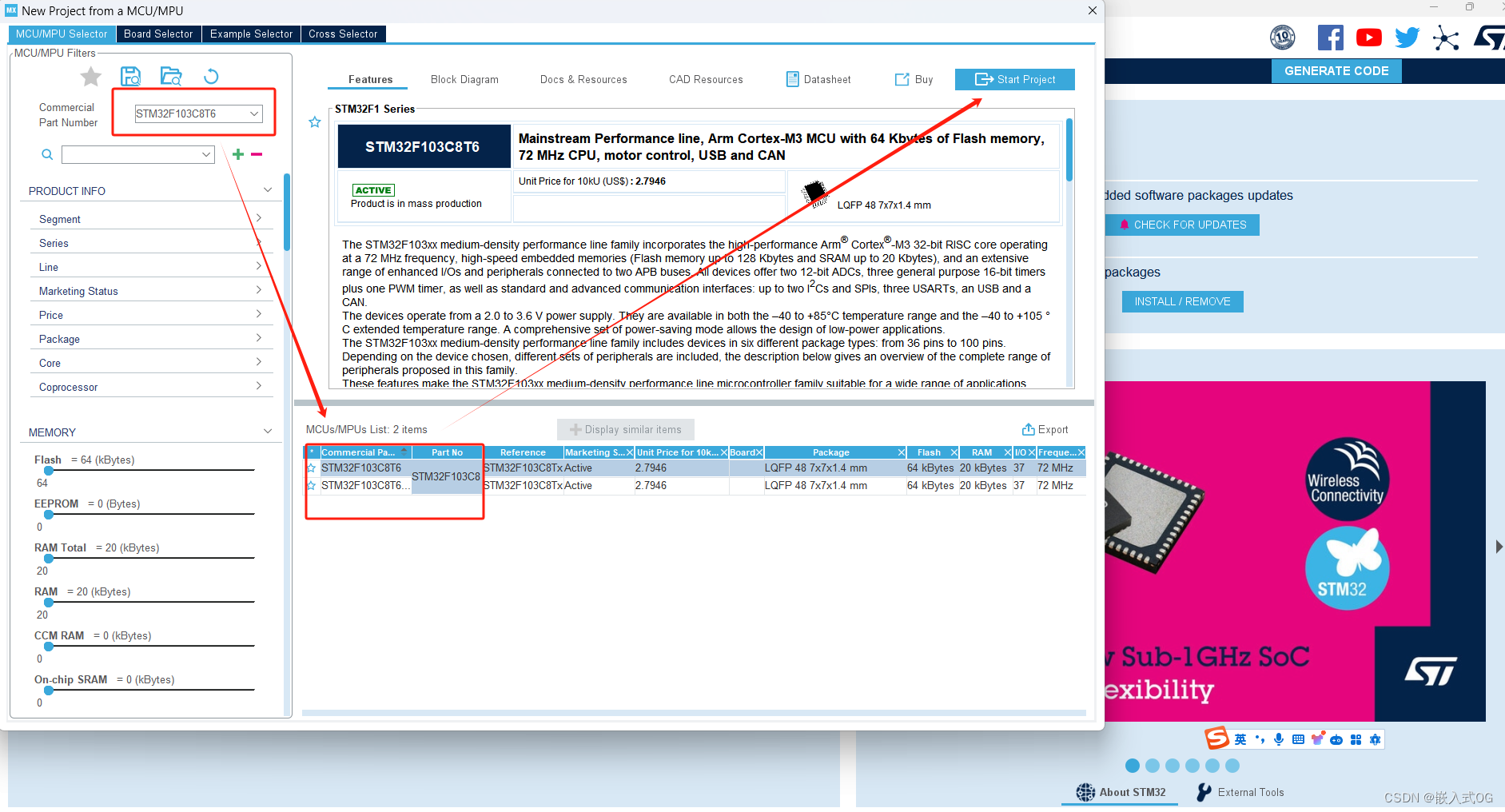
3.2、选芯片:stm32f103c8t6
3.3、读芯片引脚原理图
找LED灯是哪个引脚控制,如图右侧PB8
3.4、先把LED灯设置为高电平模式
这样子上电之后,灯默认就是关的,这时候代码控制外设翻转高低电平,就可以点灯了(这步以第二张为准,3.7有写)
这里需要注意的是当在TIM4里面设置之后PB8就变了
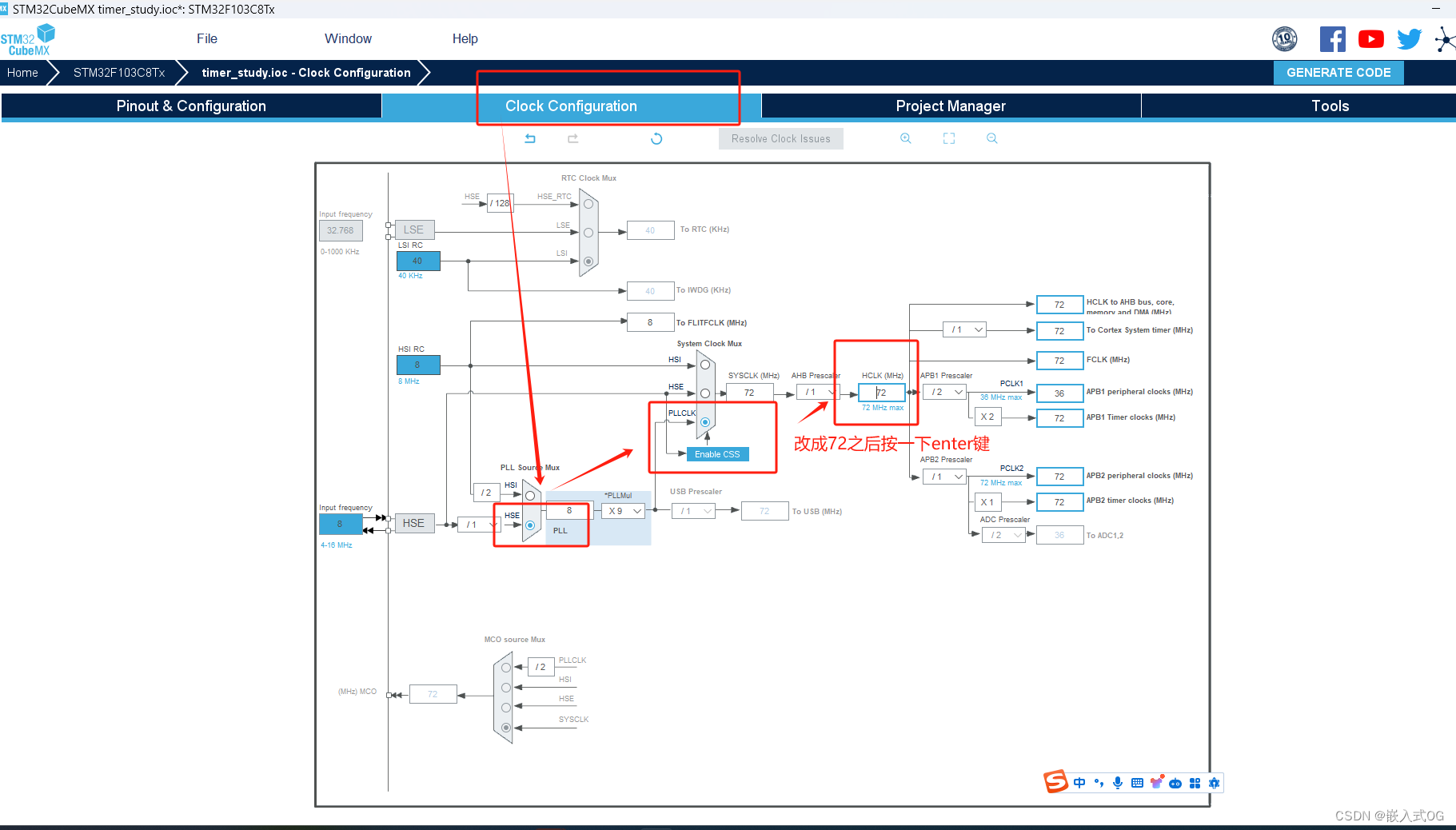
3.5、设置时钟
配置时钟频率
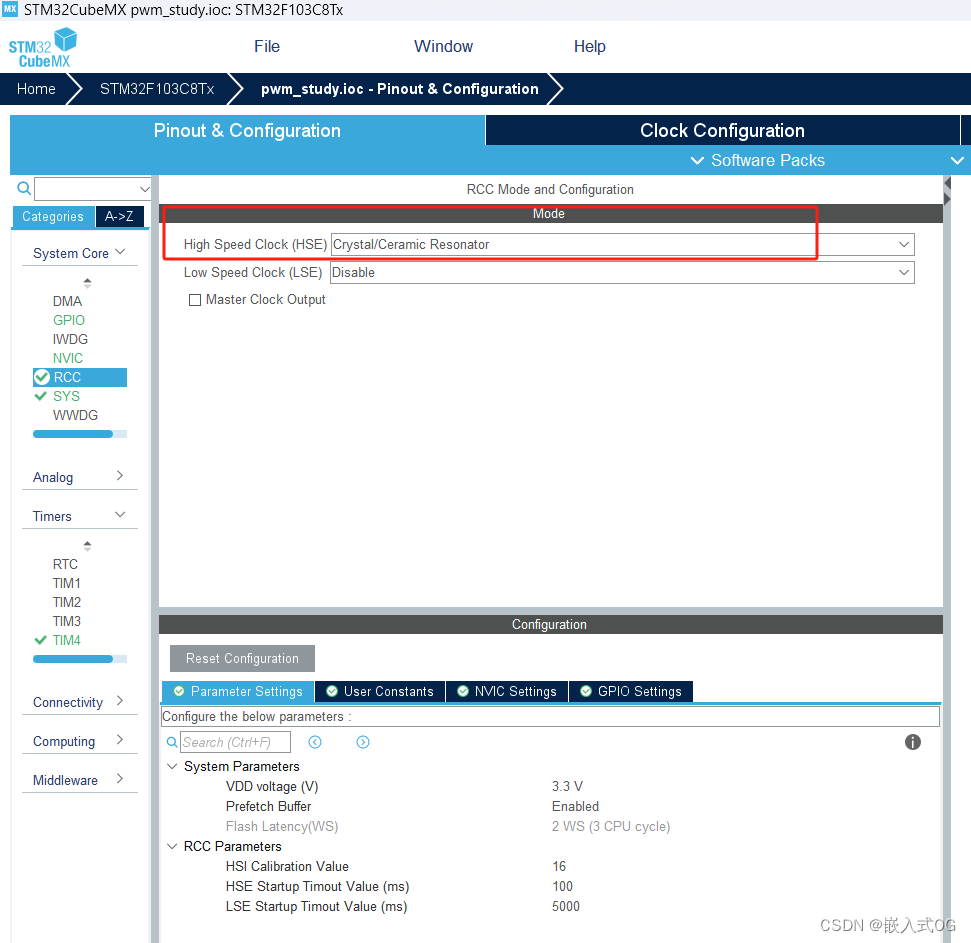
3.6、RCC配置
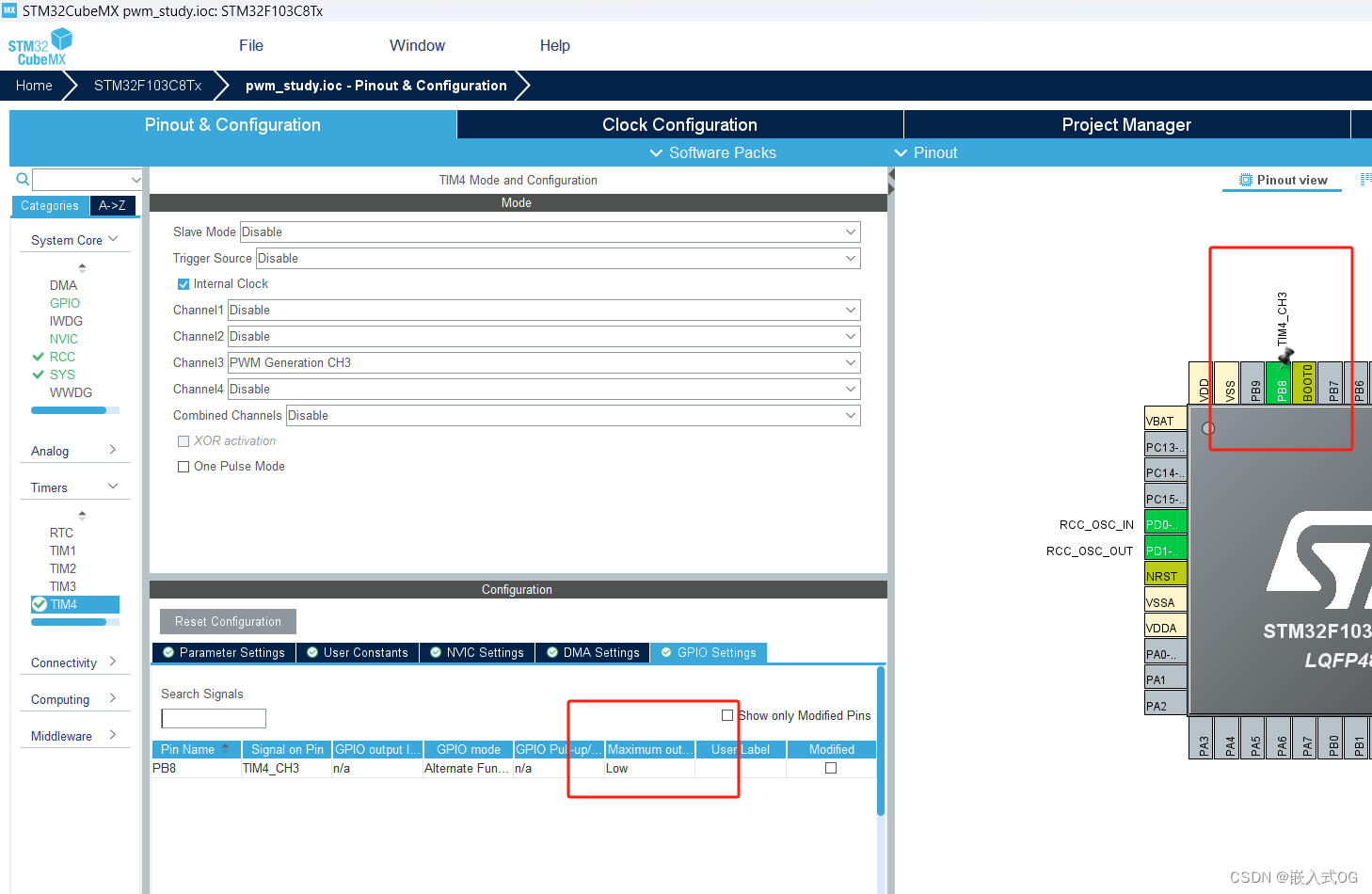
3.7、定时器
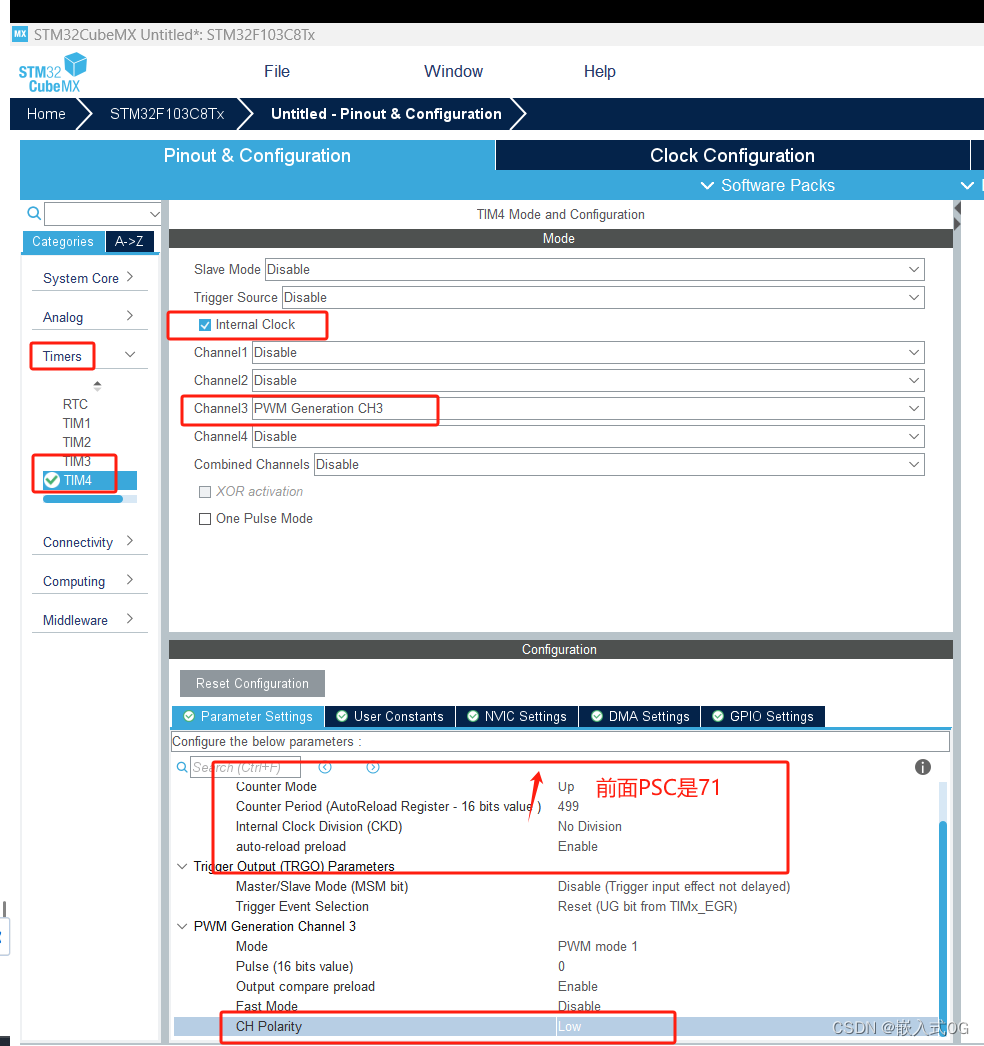 记得把极性设置为Low,因为LED灯是低电平才亮。
记得把极性设置为Low,因为LED灯是低电平才亮。
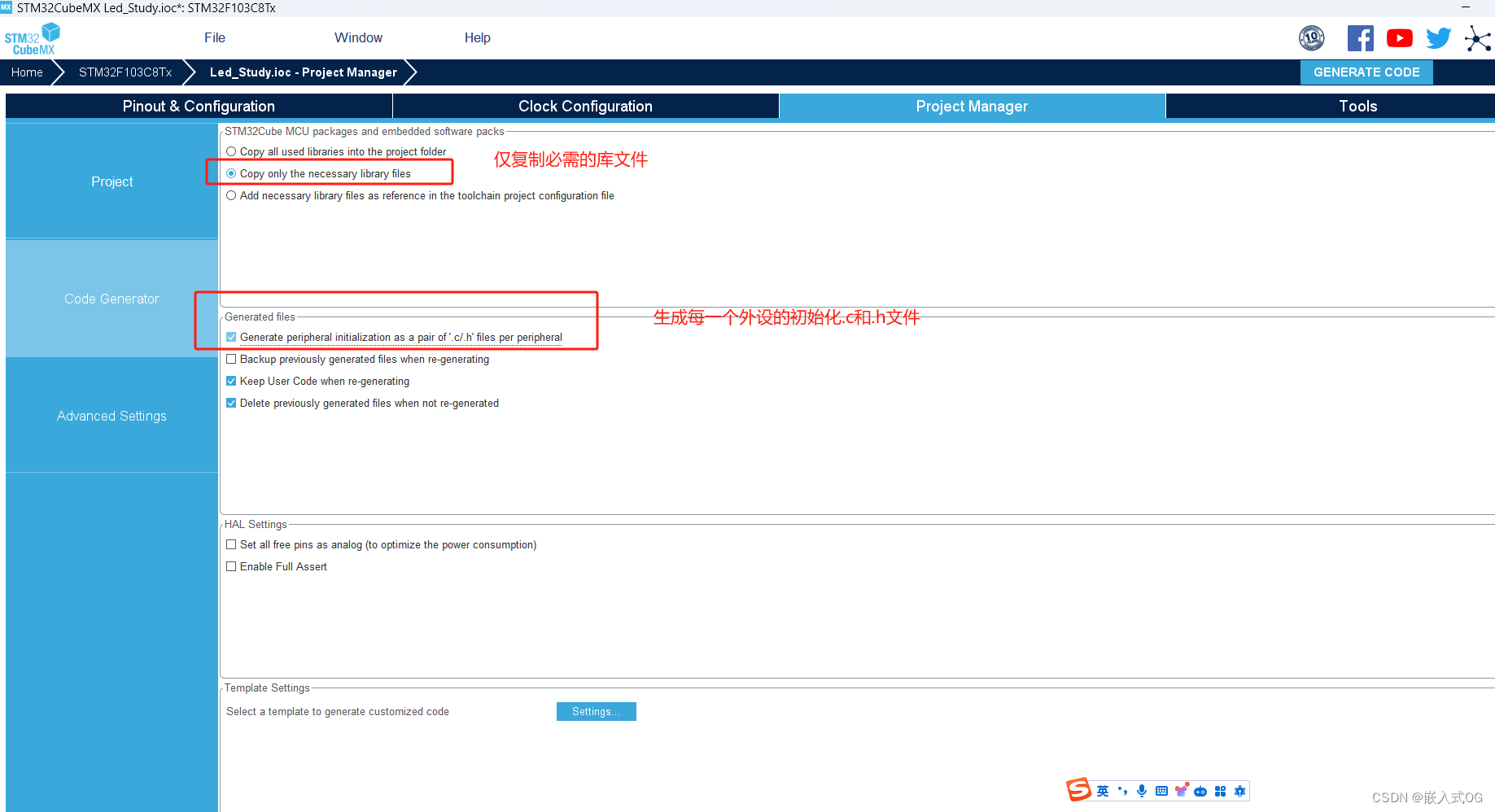
3.8、代码自动设置生成的文件
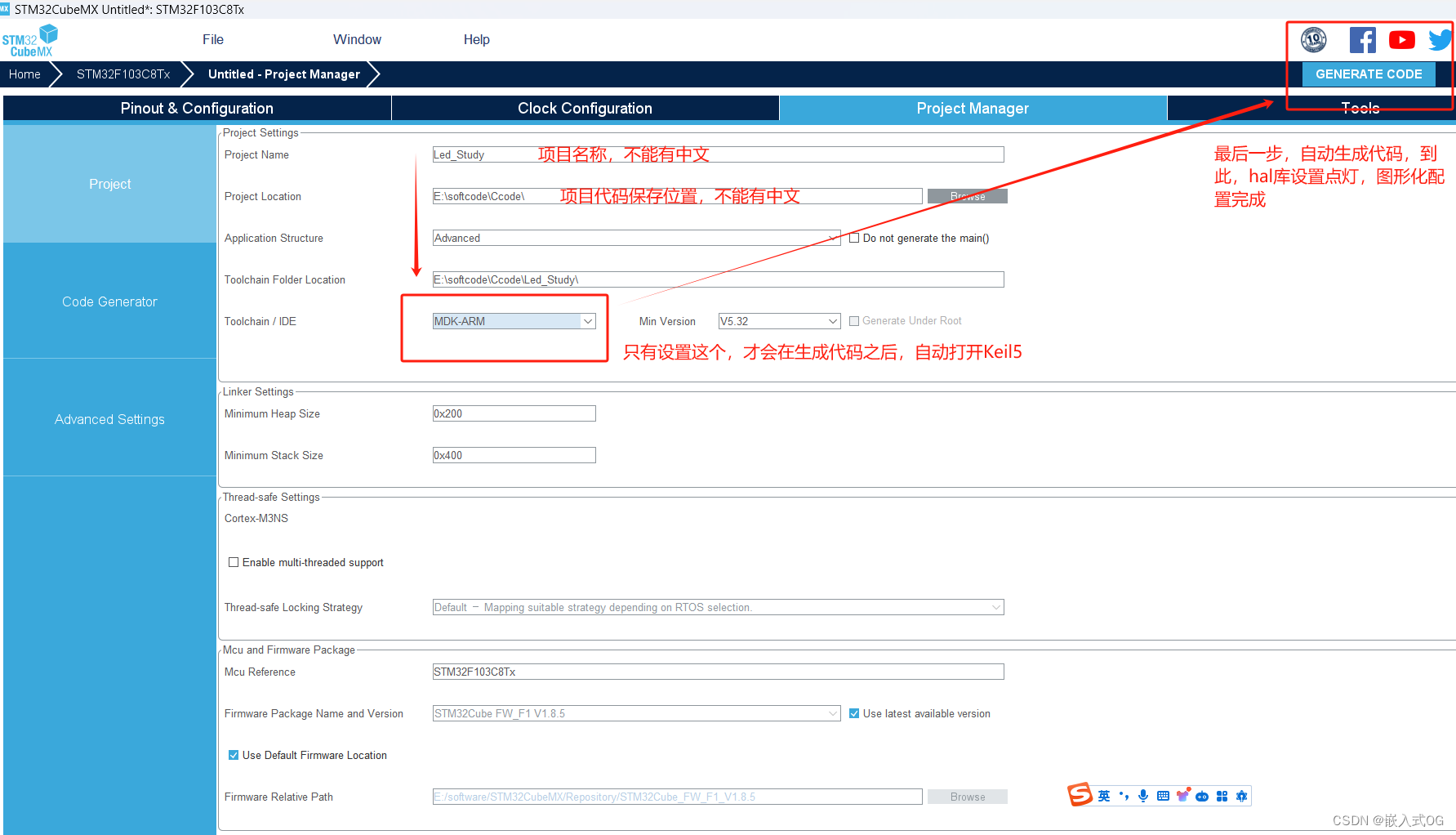
3.9、图形化最后一步
项目名称:pwm_study
四:编写业务代码
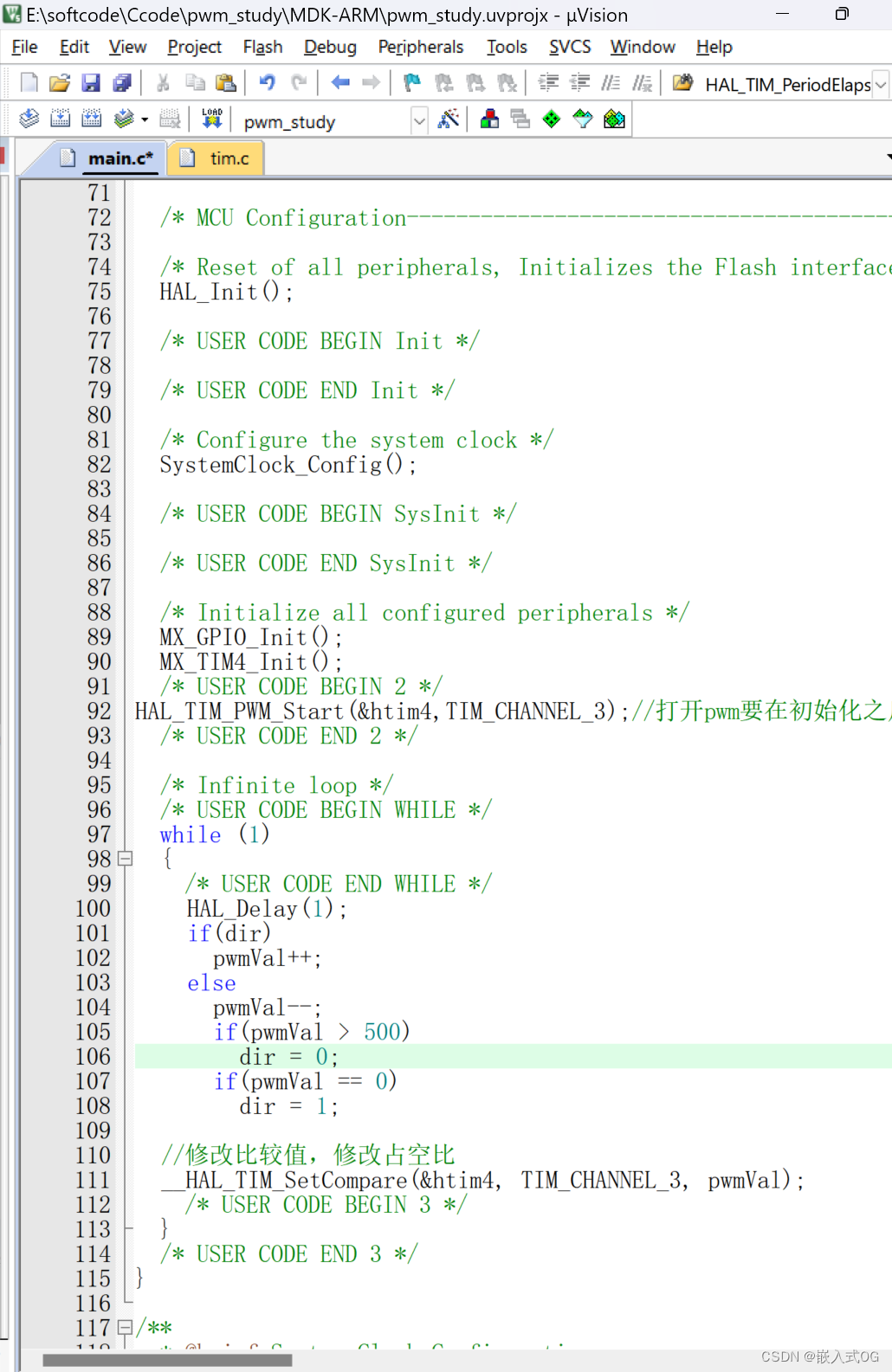
4.1、在初始化完成的代码之后添加业务代码
下面是所有需要添加的代码,主要看添加的位置,全文只增加了三处代码,其余都没变
uint16_t pwmVal=0; //调整PWM占空比
uint8_t dir=1; //设置改变方向。1:占空比越来越大;0:占空比越来越小
// ②使能 Timer4 第3通道 PWM 输出
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);
// ③while循环实现呼吸灯效果
while (1)
{
HAL_Delay(1);
if (dir)
pwmVal++;
else
pwmVal--;
if (pwmVal > 500)
dir = 0;
if (pwmVal == 0)
dir =1;
//修改比较值,修改占空比
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, pwmVal);
}
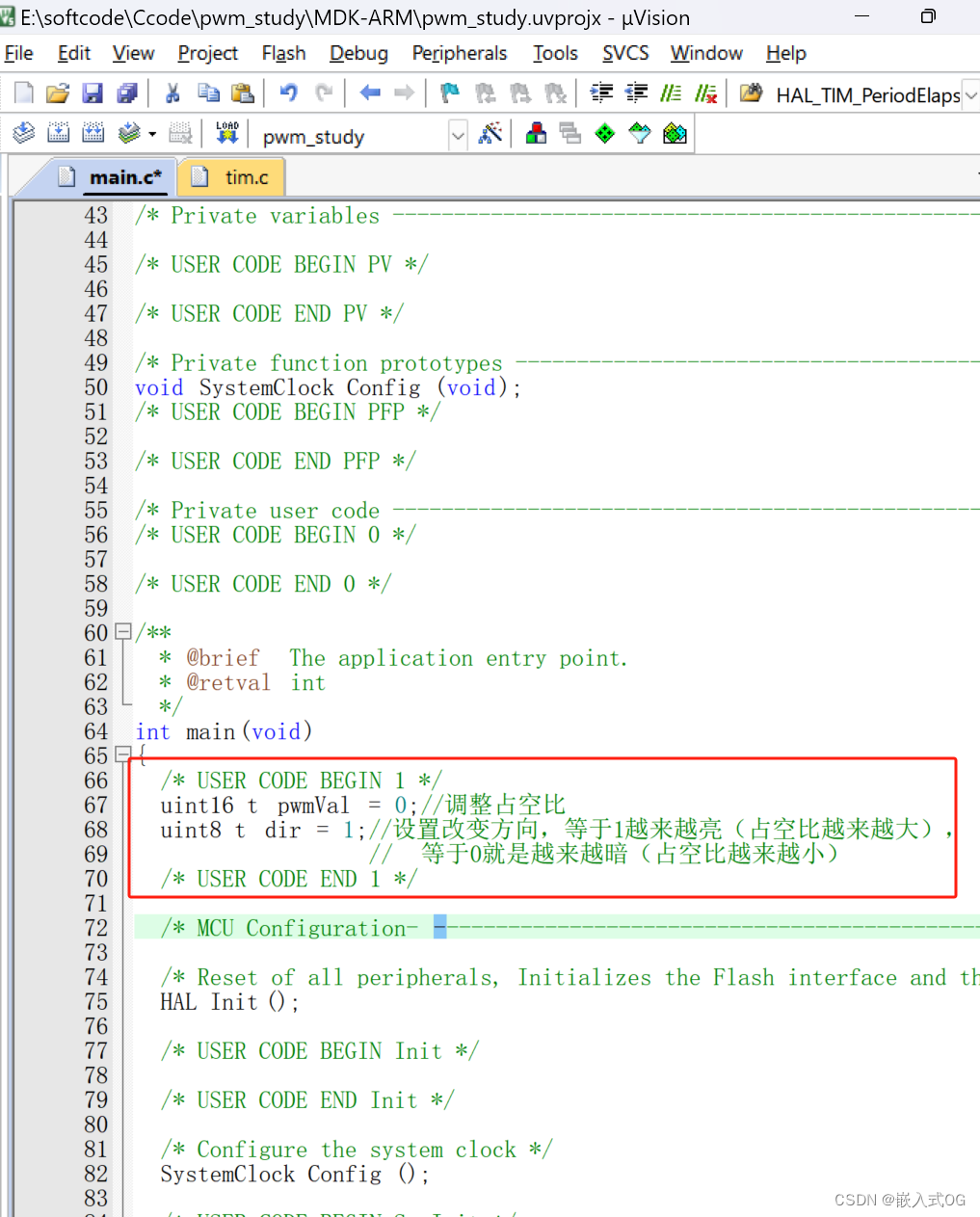
4.2 、定义变量
在main.c函数中添加定义变量代码pwmVal和dir
/* USER CODE BEGIN 1 */
uint16_t pwmVal = 0;//调整占空比
uint8_t dir = 1;//设置改变方向,等于1越来越亮(占空比越来越大),
// 等于0就是越来越暗(占空比越来越小)
/* USER CODE END 1 */
4.3、初始化完成后打开PWM
在main中,当GPIO和TIM4初始化之后,才打开PWM
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);//打开pwm要在初始化之后打开
/* USER CODE END 2 */
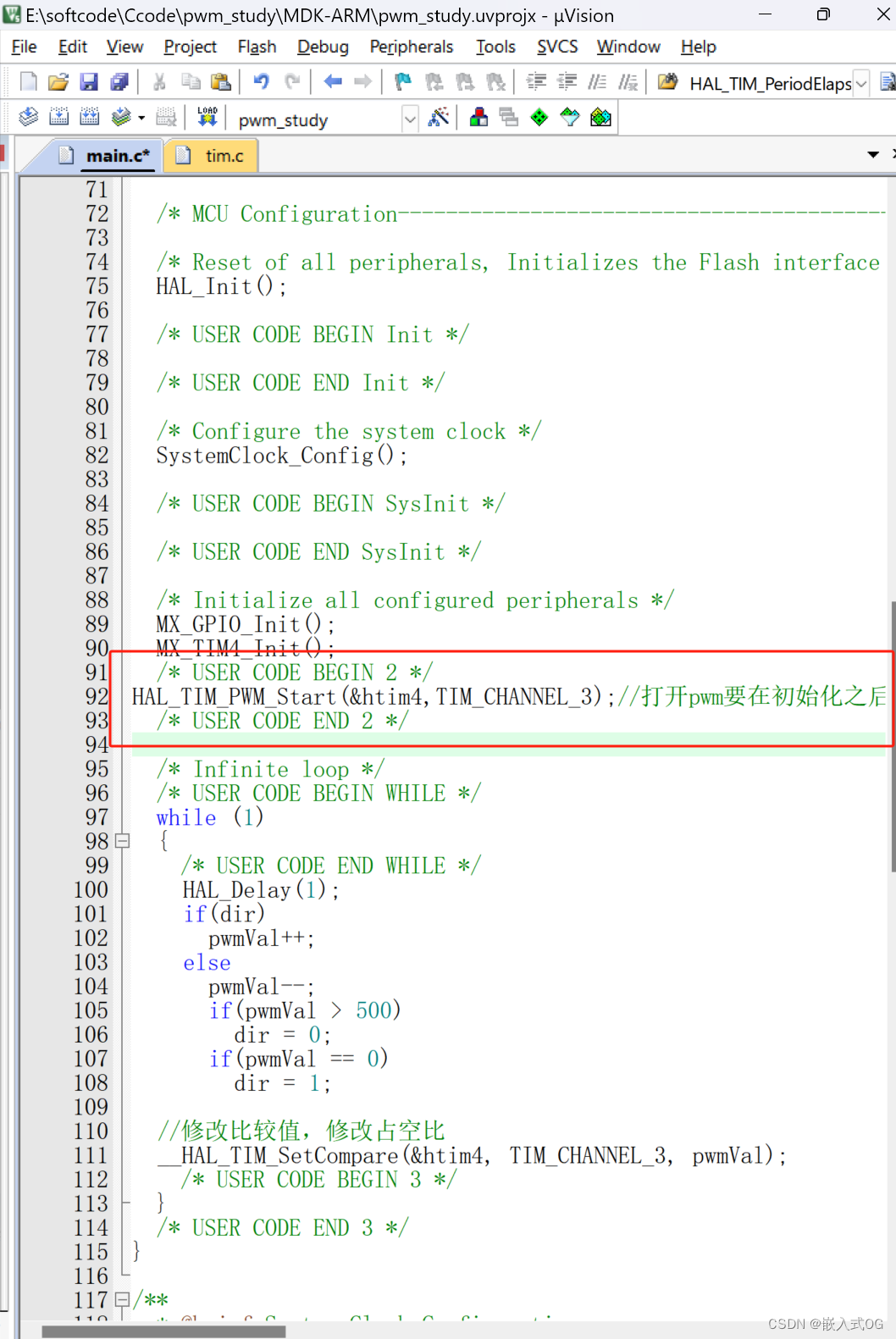
4.4、在while(1)循环中添加pwmVal占空比代码
用if语句判断灯亮灯灭,在pwm模式1中,看counter和CCRx比较
/* USER CODE END WHILE */
HAL_Delay(1);
if(dir)
pwmVal++;
else
pwmVal--;
if(pwmVal > 500)
dir = 0;
if(pwmVal == 0)
dir = 1;
//修改比较值,修改占空比
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, pwmVal);
4.5、main.c总代码,直接复制可用
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint16_t pwmVal = 0;//调整占空比
uint8_t dir = 1;//设置改变方向,等于1越来越亮(占空比越来越大),
// 等于0就是越来越暗(占空比越来越小)
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM4_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);//打开pwm要在初始化之后打开
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
HAL_Delay(1);
if(dir)
pwmVal++;
else
pwmVal--;
if(pwmVal > 500)
dir = 0;
if(pwmVal == 0)
dir = 1;
//修改比较值,修改占空比
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, pwmVal);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
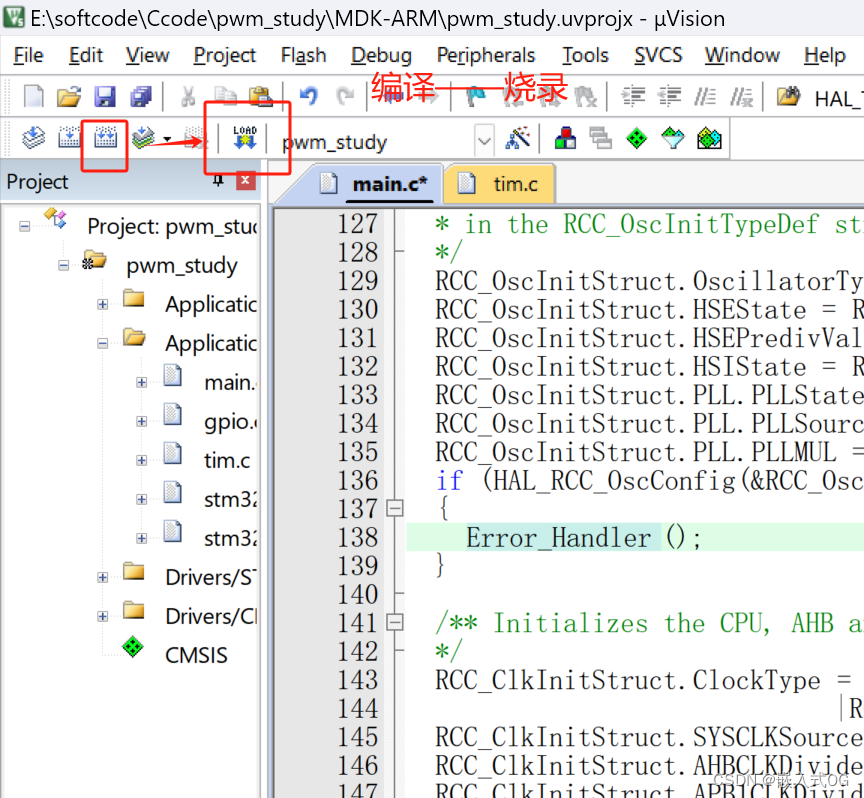
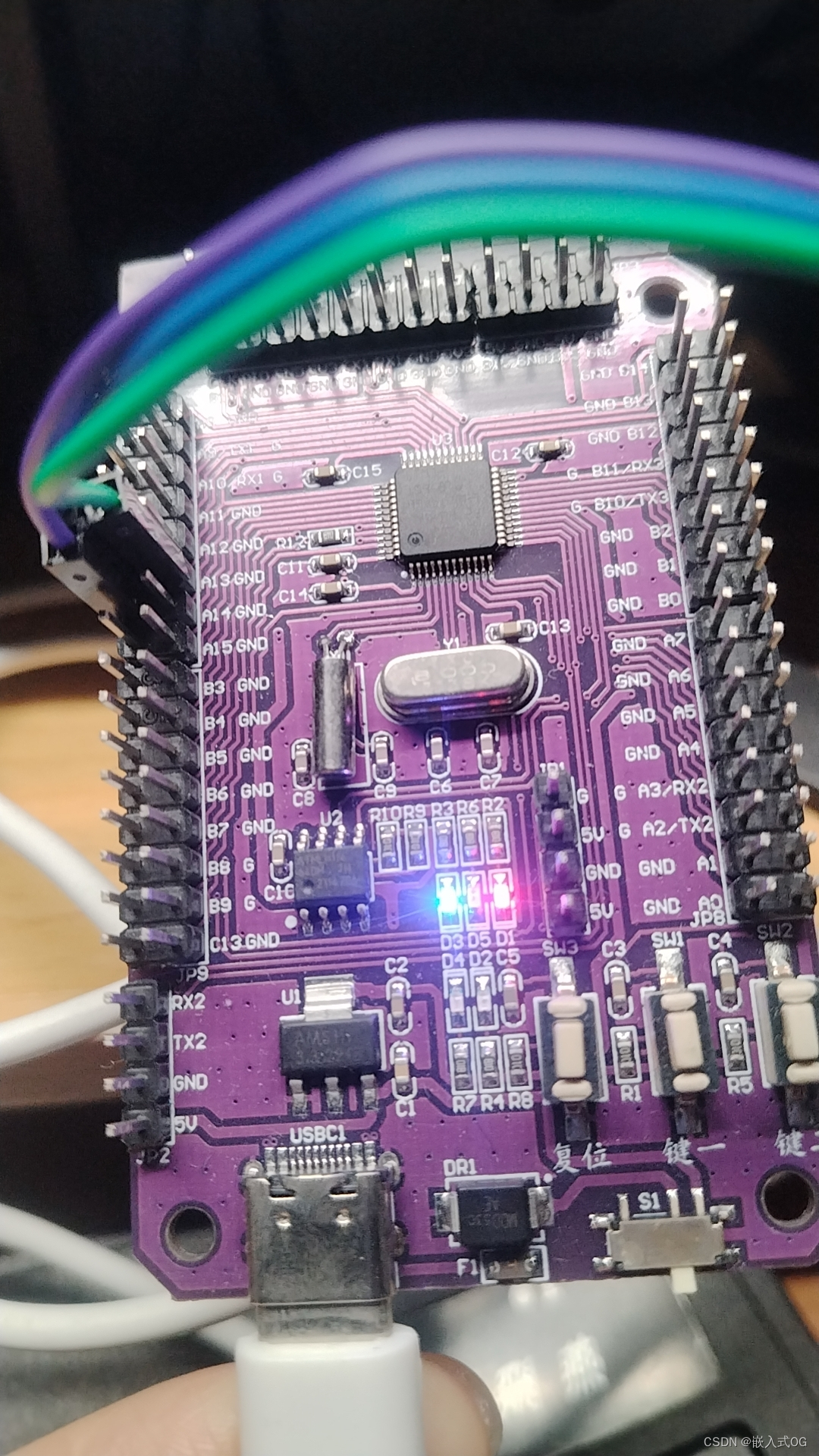
4.6、呼吸灯效果
1.代码编译,烧录之后
2.LED灯在500ms内慢慢从亮到灭,从灭到亮
 以上,完
以上,完
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!