普冉(PUYA)单片机开发笔记(10): I2C通信-配置从机
概述
I2C 常用在某些型号的传感器和 MCU 的连接,速率要求不高,距离很短,使用简便。
I2C的通信基础知识请参见《基础通信协议之 IIC详细讲解 - 知乎》。
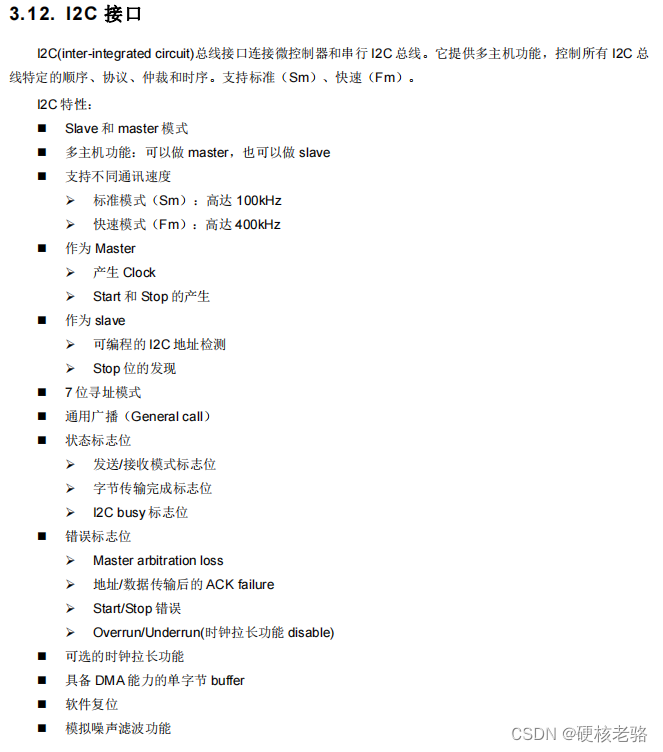
PY32F003 可以复用出一个 I2C 接口(PA3:SCL,PA2:SDA),可以和 DMA 配合完成 I2C 的主从通信。厂家的数据手册对 I2C 接口简述如下图。
要完成 I2C 的通信实验需要两个 MCU。这里现尝试着配置好 I2C 的从机,下一篇再配置 I2C 的主机,并完成两者的通信实验。
代码实现的步骤
1. 在 py32f0xx_hal_conf.h 文件中增加对 I2C 的引用
在 Exported constances 一节中将 #define HAL_I2C_MODULE_ENABLED 的注释打开,打开对 I2C 功能的引用函数。打开后的代码节选如下。
/* Exported constants --------------------------------------------------------*/
/* ########################## Module Selection ############################## */
/**
* @brief This is the list of modules to be used in the HAL driver
*/
#define HAL_MODULE_ENABLED
#define HAL_RCC_MODULE_ENABLED
#define HAL_ADC_MODULE_ENABLED
//#define HAL_CRC_MODULE_ENABLED
//#define HAL_COMP_MODULE_ENABLED
#define HAL_FLASH_MODULE_ENABLED
#define HAL_GPIO_MODULE_ENABLED
//#define HAL_IWDG_MODULE_ENABLED
//#define HAL_WWDG_MODULE_ENABLED
#define HAL_TIM_MODULE_ENABLED
#define HAL_DMA_MODULE_ENABLED
#define HAL_LPTIM_MODULE_ENABLED
#define HAL_PWR_MODULE_ENABLED
#define HAL_I2C_MODULE_ENABLED
#define HAL_UART_MODULE_ENABLED
//#define HAL_SPI_MODULE_ENABLED
//#define HAL_RTC_MODULE_ENABLED
//#define HAL_LED_MODULE_ENABLED
//#define HAL_EXTI_MODULE_ENABLED
#define HAL_CORTEX_MODULE_ENABLED
/* ########################## Oscillator Values adaptation ####################*/2. 在 main.h 中添加 I2C 相关的函数声明
/** ----------------------------------------------------------------------------
* @name : HAL_StatusTypeDef app_i2c_init(void);
* @brief : i2c 初始化
* @param :
* @retval : HAL_OK: 写入成功; 其它: 错误
* @remark : 上级函数必须检查操作返回值, 只有 HAL_OK 时才可继续操作
*** ----------------------------------------------------------------------------
*/
HAL_StatusTypeDef app_i2c_init(void);
/** ----------------------------------------------------------------------------
* @brief : i2c 测试使用的三个函数, 接收/发送/等待
* @param :
* @retval :
* @remark :
*** ----------------------------------------------------------------------------
*/
HAL_StatusTypeDef app_i2c_receive(void);
HAL_StatusTypeDef app_i2c_transmit(void);
void app_i2c_wait(void);3. 在 app_i2c.c 中实现这些函数
在 Application/User 组中增加一个 app_i2c.c 文件。
/**
******************************************************************************
* @file app_i2c.c
* @brief I2C functions.
******************************************************************************
* @copyright
*
* Copyright (c) 2023 CuteModem Intelligence.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
#include "main.h"
#define EXDATA_LEN 15 // 数据长度
#define I2C_ADDRESS 0xA0 // 本机地址0xA0
#define I2C_SPEEDBPS 100000 // 通讯速度100K
#define I2C_DUTYCYCLE I2C_DUTYCYCLE_16_9 // 占空比
I2C_HandleTypeDef I2cHandle;
uint8_t mI2cTxBuf[EXDATA_LEN] = {1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15};
uint8_t mI2cRxBuf[EXDATA_LEN] = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0};
HAL_StatusTypeDef app_i2c_init(void)
{
HAL_StatusTypeDef cfg_res = HAL_OK;
I2cHandle.Instance = I2C; // I2C
I2cHandle.Init.ClockSpeed = I2C_SPEEDBPS; // I2C 通讯速度
I2cHandle.Init.DutyCycle = I2C_DUTYCYCLE; // I2C 占空比
I2cHandle.Init.OwnAddress1 = I2C_ADDRESS; // I2C 地址
I2cHandle.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; // 禁止广播呼叫
I2cHandle.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; // 允许时钟延长
cfg_res = HAL_I2C_Init(&I2cHandle); //I2C初始化
if (cfg_res != HAL_OK) return cfg_res;
return cfg_res;
}
HAL_StatusTypeDef app_i2c_receive(void)
{
/*I2C从机中断方式接收*/
while (HAL_I2C_Slave_Receive_IT(&I2cHandle, (uint8_t *)mI2cRxBuf, EXDATA_LEN) != HAL_OK)
{
Error_Handler();
}
return HAL_OK;
}
HAL_StatusTypeDef app_i2c_transmit(void)
{
/*I2C从机中断方式发送*/
while (HAL_I2C_Slave_Transmit_IT(&I2cHandle, (uint8_t *)mI2cTxBuf, EXDATA_LEN) != HAL_OK)
{
Error_Handler();
}
return HAL_OK;
}
void app_i2c_wait(void)
{
/* 判断当前I2C状态, 等待I2C状态就绪 */
while (HAL_I2C_GetState(&I2cHandle) != HAL_I2C_STATE_READY);
}
首先定义了4个常量。
- 交换数据的长度 EXDATA_LEN(Exchange Data Length)
- 本机的 I2C 地址为 0xA0
- I2C 的通信速率定为 100Kbps
- 高速模式下 I2C 总线的占空比为 9/16
接着定义了 mI2CTxBuf 和? mI2CRxBuf 两个缓冲区变量,长度为 EXDATA_LEN
初始化函数很简单,这里设置了“禁止广播呼叫”
接收、发送函数都使用了中断式模式,并使用了等待方式,一直到发送/接收完毕才会返回
等待函数就是循环读 I2C 的 State 标志,直到 I2C 空闲为止
4. 在 py32f0xx_hal_msp.c 增加 i2c 的外设初始化
static DMA_HandleTypeDef HdmaCh1;
static DMA_HandleTypeDef HdmaCh2;
...
...
/**
* -----------------------------------------------------------------------
* @name : void HAL_I2C_MspInit(I2C_HandleTypeDef* hi2c)
* @brief : 初始化I2C相关MSP
* @param : [in] *hi2c, I2C handler pointer
* @retval : void
* @remark :
* -----------------------------------------------------------------------
*/
void HAL_I2C_MspInit(I2C_HandleTypeDef *hi2c)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_SYSCFG_CLK_ENABLE(); //SYSCFG时钟使能
__HAL_RCC_DMA_CLK_ENABLE(); //DMA时钟使能
__HAL_RCC_I2C_CLK_ENABLE(); //I2C时钟使能
__HAL_RCC_GPIOA_CLK_ENABLE(); //GPIOA时钟使能
/**I2C GPIO Configuration
PA3 : I2C1_SCL
PA2 : I2C1_SDA
*/
GPIO_InitStruct.Pin = GPIO_PIN_3 | GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; //推挽方式
GPIO_InitStruct.Pull = GPIO_PULLUP; //上拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF12_I2C; //复用为I2C
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); //GPIO初始化
/*复位I2C*/
__HAL_RCC_I2C_FORCE_RESET();
__HAL_RCC_I2C_RELEASE_RESET();
/* I2C1 interrupt Init */
HAL_NVIC_SetPriority(I2C1_IRQn, 0, 0); //中断优先级设置
HAL_NVIC_EnableIRQ(I2C1_IRQn); //使能I2C中断
//DMA配置
HAL_SYSCFG_DMA_Req(9); //DMA1_MAP选择为IIC_TX
HAL_SYSCFG_DMA_Req(0xA00); //DMA2_MAP选择为IIC_RX
/* Configure the DMA handler for Transmission process */
HdmaCh1.Instance = DMA1_Channel1; // 选择DMA通道1
HdmaCh1.Init.Direction = DMA_MEMORY_TO_PERIPH; // 方向为从存储器到外设
HdmaCh1.Init.PeriphInc = DMA_PINC_DISABLE; // 禁止外设地址增量
HdmaCh1.Init.MemInc = DMA_MINC_ENABLE; // 使能存储器地址增量
HdmaCh1.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE; // 外设数据宽度为8位
HdmaCh1.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE; // 存储器数据宽度位8位
HdmaCh1.Init.Mode = DMA_NORMAL; // 禁止循环模式
HdmaCh1.Init.Priority = DMA_PRIORITY_VERY_HIGH; // 通道优先级为"很高"
HAL_DMA_Init(&HdmaCh1); // 初始化DMA通道1
__HAL_LINKDMA(hi2c, hdmatx, HdmaCh1); // DMA1 关联 IIC_TX
/* Configure the DMA handler for Transmission process */
HdmaCh2.Instance = DMA1_Channel2; // 选择DMA通道1
HdmaCh2.Init.Direction = DMA_PERIPH_TO_MEMORY; // 方向为从外设到存储
HdmaCh2.Init.PeriphInc = DMA_PINC_DISABLE; // 禁止外设地址增量
HdmaCh2.Init.MemInc = DMA_MINC_ENABLE; // 使能存储器地址增量
HdmaCh2.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE; // 外设数据宽度为8位
HdmaCh2.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE; // 存储器数据宽度位8位
HdmaCh2.Init.Mode = DMA_NORMAL; // 禁止循环模式
HdmaCh2.Init.Priority = DMA_PRIORITY_HIGH; // 通道优先级为高
HAL_DMA_Init(&HdmaCh2); // 初始化DMA通道1
__HAL_LINKDMA(hi2c, hdmarx, HdmaCh2); // DMA1 关联 IIC_RX
HAL_NVIC_SetPriority(DMA1_Channel1_IRQn, 1, 1); // 中断优先级设置
HAL_NVIC_EnableIRQ(DMA1_Channel1_IRQn); // 使能DMA通道1中断
HAL_NVIC_SetPriority(DMA1_Channel2_3_IRQn, 0, 1); // 中断优先级设置
HAL_NVIC_EnableIRQ(DMA1_Channel2_3_IRQn); // 使能DMA通道2_3中断
}
指定 PA3 管脚为 I2C_SCL, PA2 管脚为 I2C_SDA。
为 I2C 分配高优先级
使用? HAL_SYSCFG_DMA_Req() 把 DMA1 的通道1和通道2分别映射到 I2C 的 TX 和 RX
配置 DMA1 的两个通道,注意收发通道的方向,TX 是内存->外设,RX是外设->内存;
??? HdmaChx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
??? HdmaChx.Init.MemDataAlignment??? = DMA_MDATAALIGN_BYTE;
是因为收发的都是 uint8_t 型的数据,是BYTE(字节)型的,也是因为PY32F003 的 I2C DMA 的收发缓冲区是单字节的。
本实验中着重考察 I2C 的通信,所以把 HdmaChx.Init.Priority 设置得都比较高,应用中不一定设置那么高的优先级,这个要看应用的需求。
5. 在 py32f0xx_hal_it.c 中增加对 I2C 和 DMA 的中断服务程序
#include "main.h"
#include "py32f0xx_it.h"
extern UART_HandleTypeDef UartHandle;
extern TIM_HandleTypeDef htim16;
extern TIM_HandleTypeDef htim1;
extern ADC_HandleTypeDef hadcdma;
/* Add for I2C functionalities */
extern I2C_HandleTypeDef I2cHandle;
...
...
void DMA1_Channel1_IRQHandler(void)
{
HAL_DMA_IRQHandler(I2cHandle.hdmatx);
}
void DMA1_Channel2_3_IRQHandler(void)
{
HAL_DMA_IRQHandler(I2cHandle.hdmarx);
}
void I2C1_IRQHandler(void)
{
HAL_I2C_EV_IRQHandler(&I2cHandle);
HAL_I2C_ER_IRQHandler(&I2cHandle);
}
...
...
注意 DMA1_Channel1 是为 TX 服务的,因此执行的是 HAL_DMA_IRQHandler(I2CHandler.hdmatx),注意是hdma"t"x;DMA2_Channl2_3 是为 RX 服务的,因此执行的是 HAL_DMA_IRQHandler(I2CHandle.hdmarx),注意是hdma“r”x。
不要忘记了 I2C_IRQHander() 中把 EV 和 ER 两个都放进去。
编译和运行
按照上述步骤,编译没有告警和错误;F8 下载到开发板。由于还没有主机通信,只能看到串口的输出,并且串口收发正常。LED 灯没有闪烁,说明正在等待和主机完成通信。
今天先到这里啦,等主机(Master)板子的代码写好,两台 MCU 做通信实验。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!