STM32-TIM定时器编码器
2023-12-15 16:27:50
目录
一、编码器接口简介
>Encoder Interface 编码器接口
>编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度
>每个高级定时器和通用定时器都拥有1个编码器接口
>两个输入引脚借用了输入捕获的通道1和通道2
二、正交编码器

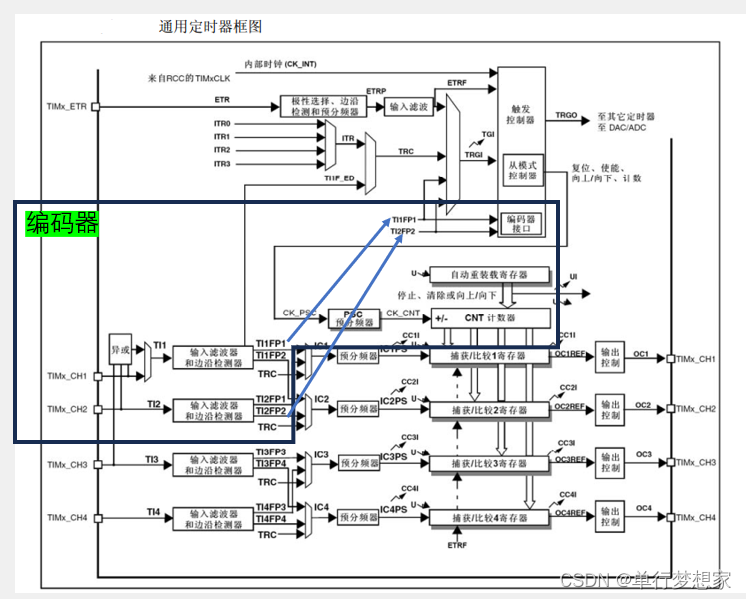
三、编码器框图
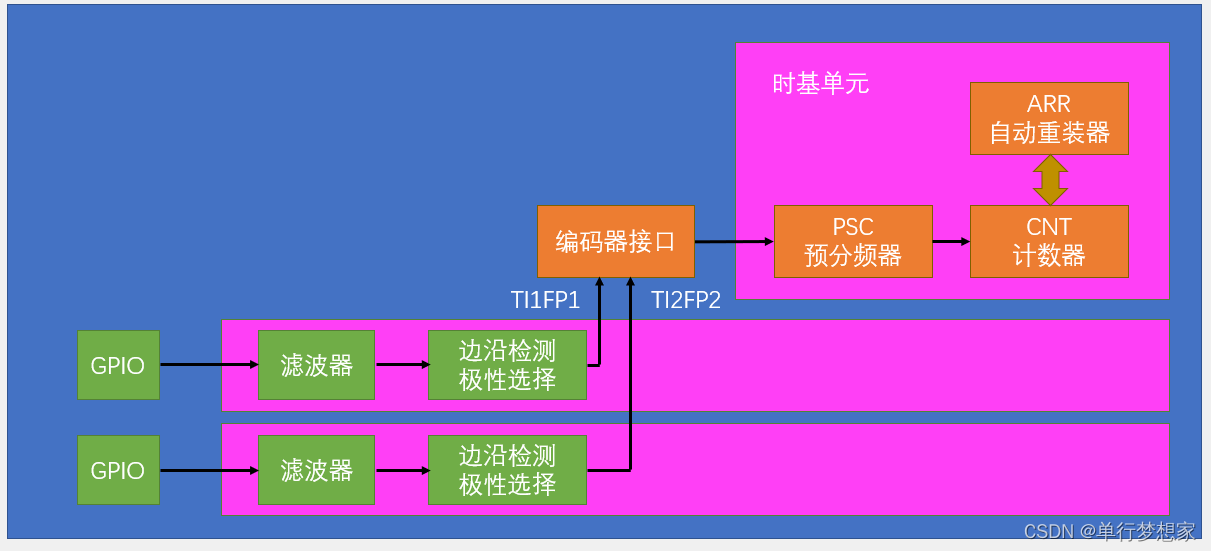
四、编码器接口基本结构
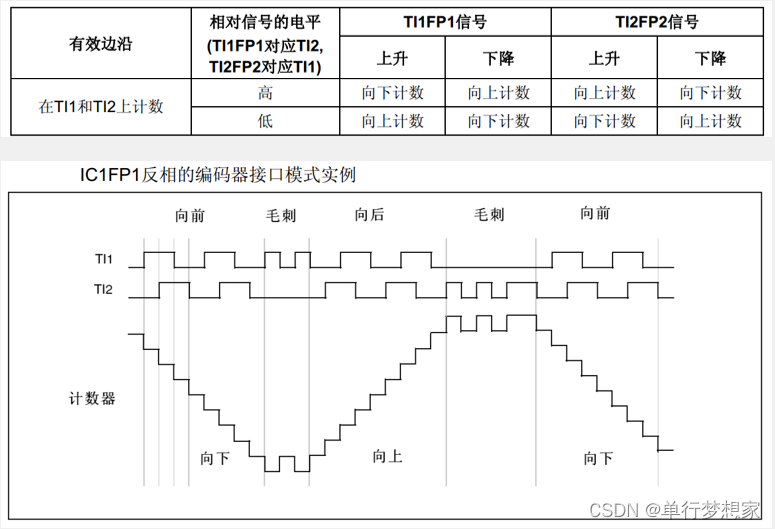
五、工作模式(库函数第二个参数)

六、实例
6.1 均不反相

6.2 TI1反相
七、开发步骤
①RCC开启时钟,开启GPIO和定时器的时钟
②配置GPIO,输入模式
③配置时基单元,不分频,自动重装65535,CNT计数
④配置输入捕获单元,滤波器和极性
⑤配置编码器接口模式
⑥调用TIM_Cmd,启动定时器
八、编码器库函数
//定时器编码器接口
void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t TIM_EncoderMode,
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? uint16_t TIM_IC1Polarity, uint16_t TIM_IC2Polarity);第一个参数:选择定时器
第二个参数:选择编码器模式
第三、四个参数:通道1和通道2的电平极性
TIM_ICPolarity_Rising:不反相
TIM_ICPolarity_Falling:反相
九、实验
编码器接口测速
Encoder.c
#include "stm32f10x.h" // Device header void Encoder_Init(void) { /*一、RCC开启时钟,开启GPIO和定时器时钟*/ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); /*二、配置GPIO*/ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//PA6和PA7输入模式 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); /*三、配置时基单元,不分频*/ TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //ARR自动重装器值 TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //PSC预分频器值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器值 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); /*四、配置输入捕获单元(滤波器,极性)*/ TIM_ICInitTypeDef TIM_ICInitStructure; TIM_ICStructInit(&TIM_ICInitStructure); TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; TIM_ICInitStructure.TIM_ICFilter = 0xF;//滤波器 TIM_ICInit(TIM3,&TIM_ICInitStructure); TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; TIM_ICInitStructure.TIM_ICFilter = 0xF;//滤波器 TIM_ICInit(TIM3,&TIM_ICInitStructure); /*五、配置编码器接口模式*/ TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising); /*六、启动定时器*/ TIM_Cmd(TIM3,ENABLE); } int16_t Encoder_Get(void)//有符号 { int16_t Temp; Temp = TIM_GetCounter(TIM3); TIM_SetCounter(TIM3,0); return Temp; }Encoder.h
#ifndef __ENCODER_H #define __ENCODER_H void Encoder_Init(void); int16_t Encoder_Get(void); #endifmian.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "OLED.h" #include "Timer.h" #include "Encoder.h" int16_t Speed; int main(void) { OLED_Init(); Timer_Init(); Encoder_Init(); OLED_ShowString(1,1,"Speed:"); while (1) { OLED_ShowSignedNum(1,7,Speed,5);//观察CNT计数器值的变化情况 } } void TIM2_IRQHandler(void) { if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET) { Speed = Encoder_Get(); TIM_ClearITPendingBit(TIM2,TIM_IT_Update); } }
文章来源:https://blog.csdn.net/qq_52902991/article/details/134934838
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!