手眼标定 - 最终精度和误差优化心得
手眼标定 - 标定误差优化项
为减少最终手眼标定的误差,可做或注意以下步骤(环节)。
一、TCP标定误差优化
1、注意标定针摆放范围
如:在实际焊接、码垛等工作时,机械臂的工作范围或摆动范围主要集中在X轴的[150mm , 1500mm]范围,Y轴的[-150mm , 350mm]范围,Z轴的[-200mm , 600mm]范围,那么在做TCP时,应将标定针(或标定点)摆放在X =(150 + 1500)/ 2 = 825mm 左右的位置,而不宜摆放在过于靠近最小值和最大值的附近。(Y轴和Z轴计算方式同理)
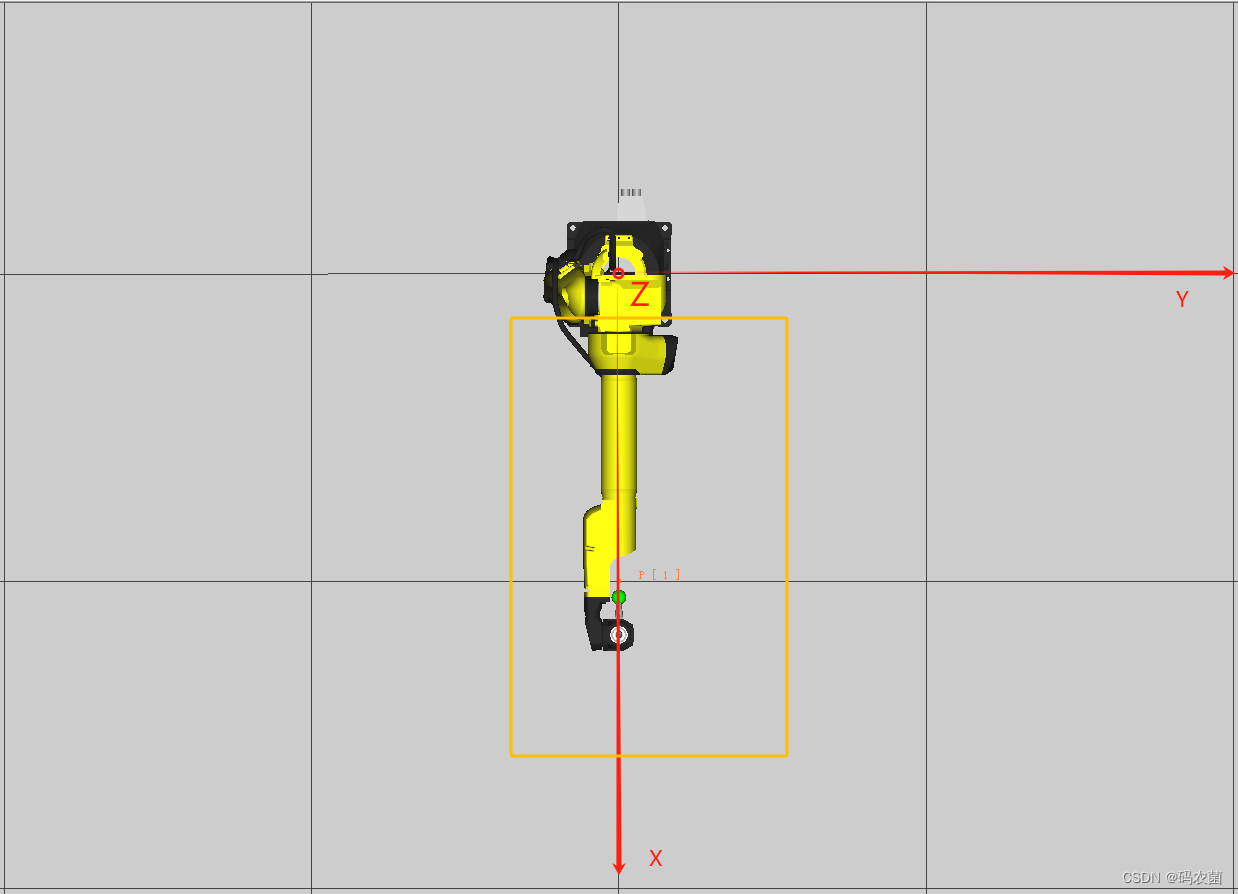
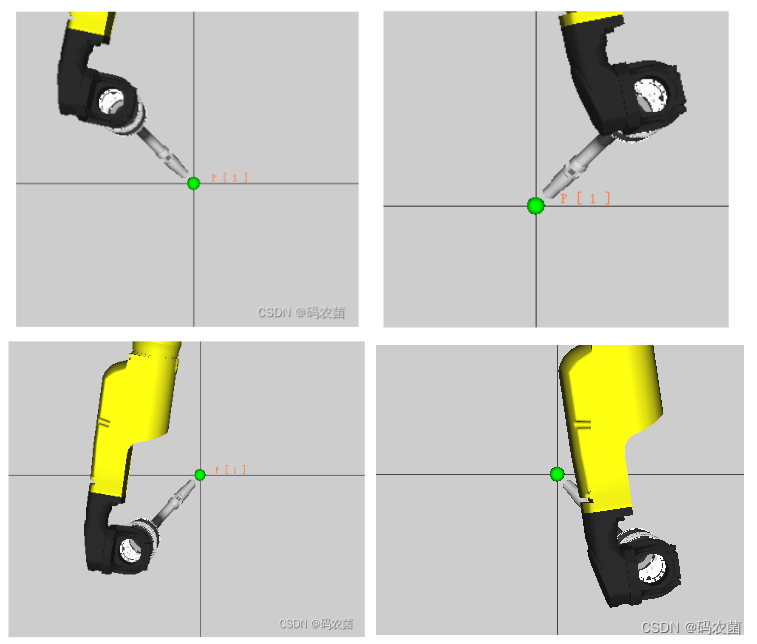
2、TCP标定时的点次态与工作姿态尽可能保持相近
如:实际焊接时枪头与XY平面的夹角在[30-50]°之间,焊接的方向一般指向+X+Y、+X-Y、-X+Y、-X-Y,那么做TCP时的点位也应该与焊接时的姿态、夹角保持一致或相近。
二、深度相机对齐矩阵误差
1、手动计算对齐矩阵
市面上常见的深度相机一般有彩色点云和非彩色点云(深度点云),彩色点云和深度点云之间一般有对齐矩阵,该矩阵可通过上位机获取,但一般都不够精准。尽量自己计算。
方法: 同一位置下,分别进行彩色点云和深度点云拍照,然后将两点云进行配准(配准算法可使用Open3D或PCL可提供的接口),最终的配准矩阵,即我们需要的对齐矩阵。然后重复拍照N次(每组照片尽量拍摄不同物体),计算对齐矩阵的平均值(N越大,对齐矩阵精度越高)。
三、手眼标定拍照姿态
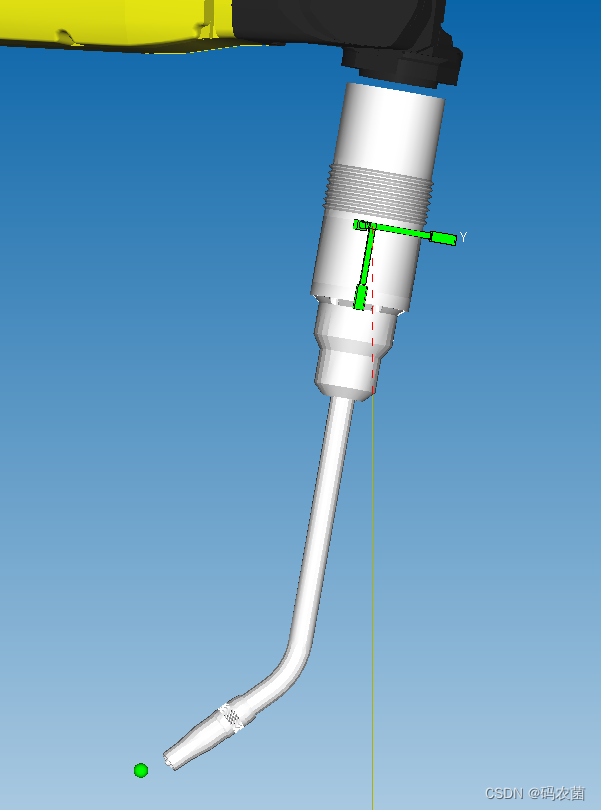
1、TCP标定姿态优先
手眼标定时,处于拍照姿态时此时的工具的姿态(本文指的是:工具向量与机器人坐标系下的XY平面的夹角)尽可能与做TCP标定时(工具向量与机器人坐标系下的XY平面的夹角)的姿态保持一致(或相近),如果在该姿态下相机无法拍到棋盘格,则可将棋盘格倾斜放置。倾斜角度慢慢调整,直到工具姿态接近TCP姿态且相机可以拍到棋盘格为最佳。
局限性: 如果相机精度不是很高,得通过增加拍照次数的方式减少手眼误差,则该方案可能有局限性,因为棋盘格斜立摆放拍照姿态会受到限制,一般只能让相机朝XY平面方向上的一个固定范围方向,不能绕Z轴拍照360°,所以最终的手眼矩阵不具有可靠的全方位都可用的最佳效果!
2、水平放置棋盘格优先
水平放置棋盘格方法,该方法可显著增加拍照次数:拍照姿态一般让相机Z轴与棋盘格平面法向量夹角处于0°-25°范围(夹角过大亦会影响手眼矩阵精度),让相机调整至可拍到整个棋盘格的位置,然后绕Z轴360°都拍下,精度差的相机拍照次数最好在大几十次甚至100次以上,而精度高的工业相机配合精度高的机器人手眼拍照次数可控制在10次以下。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!