三、e2studio VS STM32CubeIDE之瑞萨RA FSP5.0.0裸机printf重定向
一、概述/目的
二、fsp4.6.0之前printf重定向方法
三、fsp5.0.0之后printf重定向方法
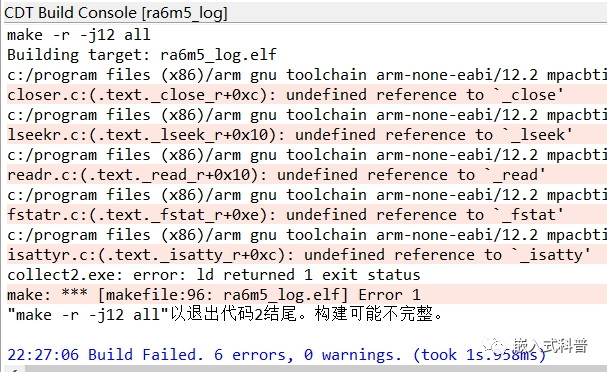
? ? 3.1 升级后编译报错
? ? 3.2 分析原因
? ? ? ? 3.2.1 newlib和gcc版本
? ? ? ? 3.2.2 参考stm32cube ide
? ? 3.3 处理办法
? ? ? ? 3.3.1 方法一
? ? ? ? 3.3.2 方法二
三、e2studio VS STM32CubeIDE之瑞萨RA FSP5.0.0裸机printf重定向
一、概述/目的
在嵌入式系统中,实现printf函数重定向输入日志,这是优秀代码的前提,或者说是基础。
瑞萨RA升级到fsp5.0.0之后,原fps4.6.0及之前的版本的printf重定向功能编译报错。
所以,我们分析报错的原因和解决办法
二、fsp4.6.0之前printf重定向方法
引用野火瑞萨RA系列FSP19.5.2.6. 重定向printf输出到串口
https://doc.embedfire.com/mcu/renesas/fsp_ra/zh/latest/doc/chapter19/chapter19.html?highlight=printf
-
fsp 4.0.0
-
gcc 10.3
-
--specs=nano.specs
-
-u _printf_float/-u_scanf_float
-
--specs=nosys.specs(disable)
-
--specs=rdimon.specs(disable)

/* 重定向 printf 输出 */
#if defined __GNUC__ && !defined __clang__
int _write(int fd, char *pBuffer, int size); //防止编译警告
int _write(int fd, char *pBuffer, int size)
{
(void)fd;
R_SCI_UART_Write(&g_uart4_ctrl, (uint8_t *)pBuffer, (uint32_t)size);
while(uart_send_complete_flag == false);
uart_send_complete_flag = false;
return size;
}
#else
int fputc(int ch, FILE *f)
{
(void)f;
R_SCI_UART_Write(&g_uart4_ctrl, (uint8_t *)&ch, 1);
while(uart_send_complete_flag == false);
uart_send_complete_flag = false;
return ch;
}
#endif
三、fsp5.0.0之后printf重定向方法
3.1 升级后编译报错
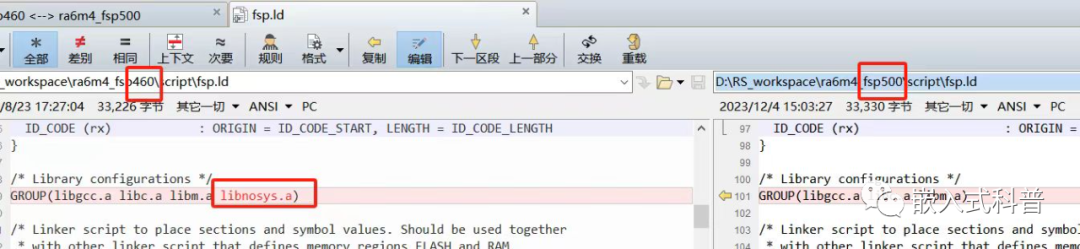
3.2 分析原因
-
差分源码
-
分析newlib:
文章:
嵌入式科普(5)ARM GNU Toolchain相关概念和逻辑
嵌入式科普(6)你听说过FreeRTOS heap6吗?
?
3.2.1 newlib和gcc版本
-
The Red Hat newlib C Library
https://sourceware.org/newlib/libc.html#sprintf -
Arm GNU Toolchain
https://developer.arm.com/downloads/-/arm-gnu-toolchain-downloads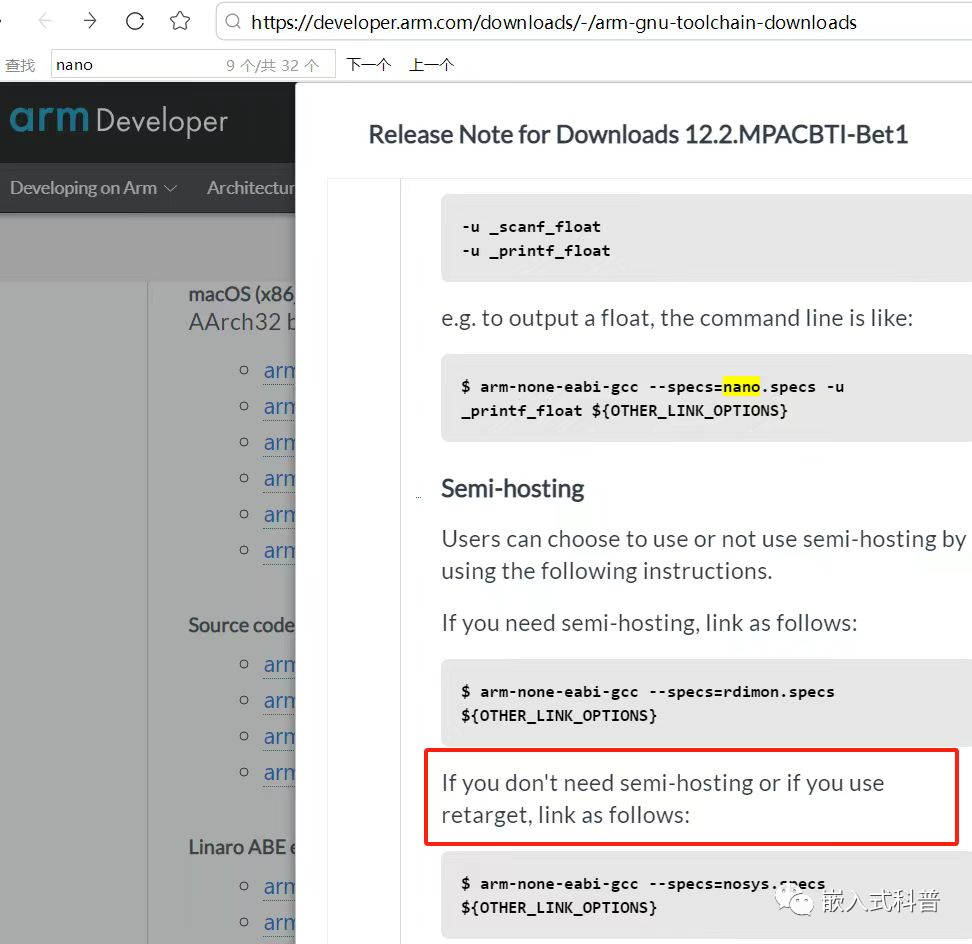
3.2.2 参考stm32cube ide
-
gcc 10.3
-
--specs=nano.specs
-
-u _printf_float/-u_scanf_float
-
--specs=nosys.specs
?

3.3 处理办法
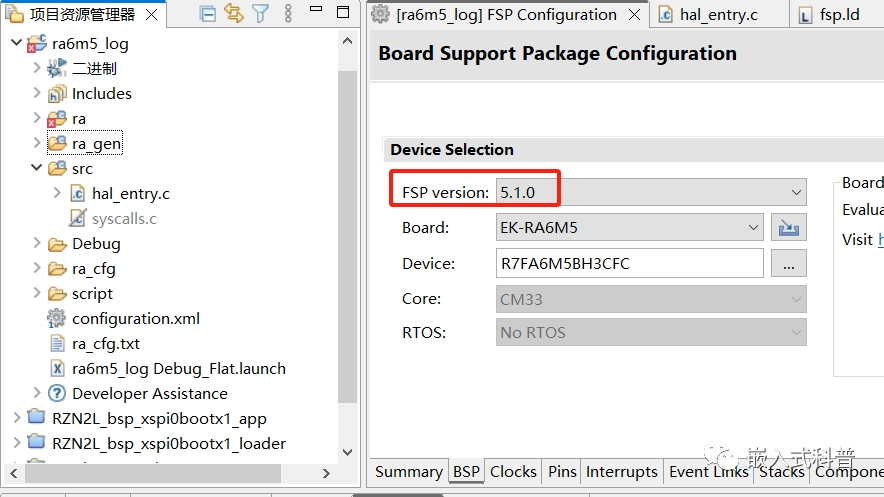
-
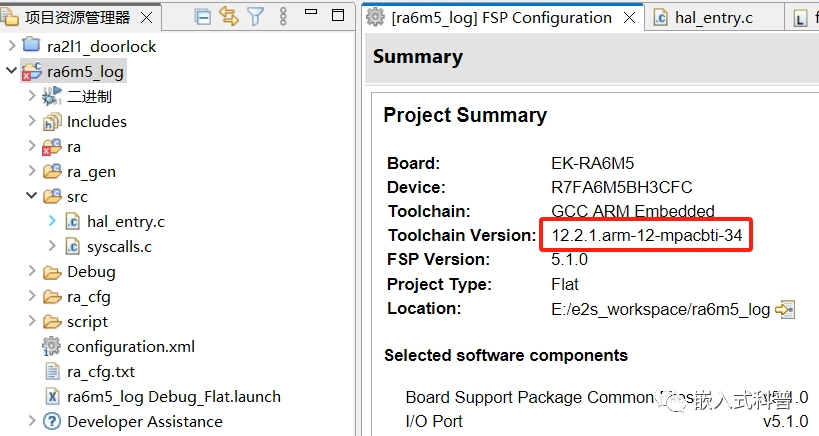
测试fsp5.1.0printf重定向
-
gcc 12.2
?
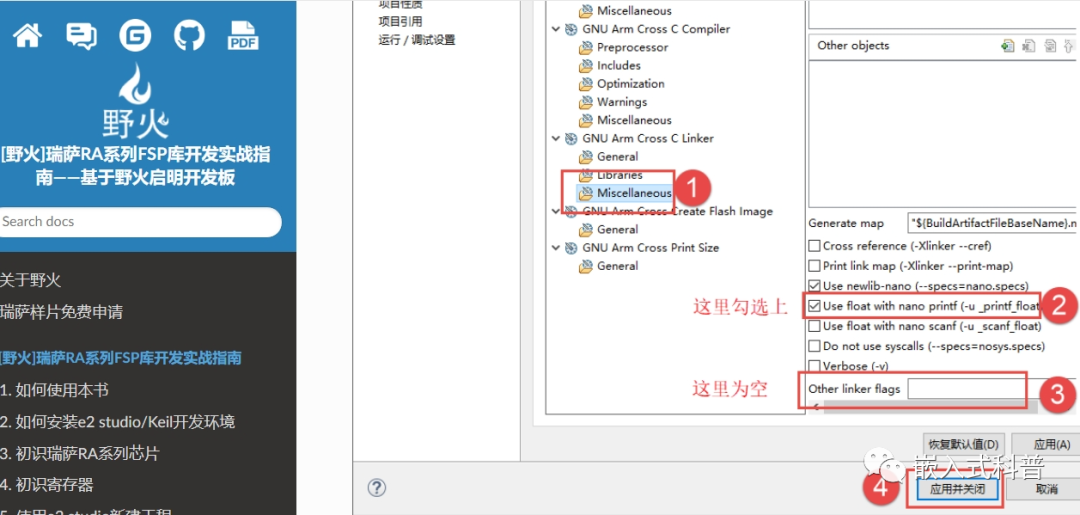
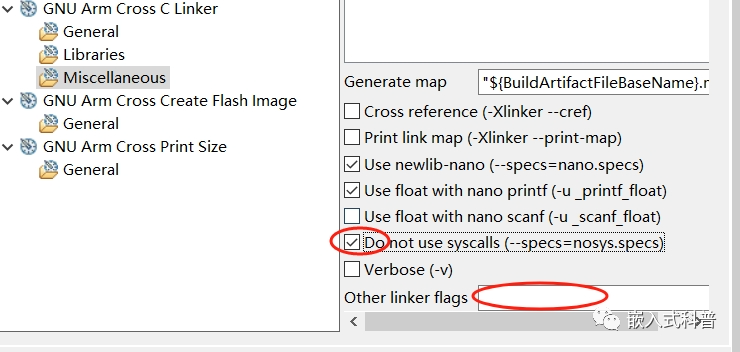
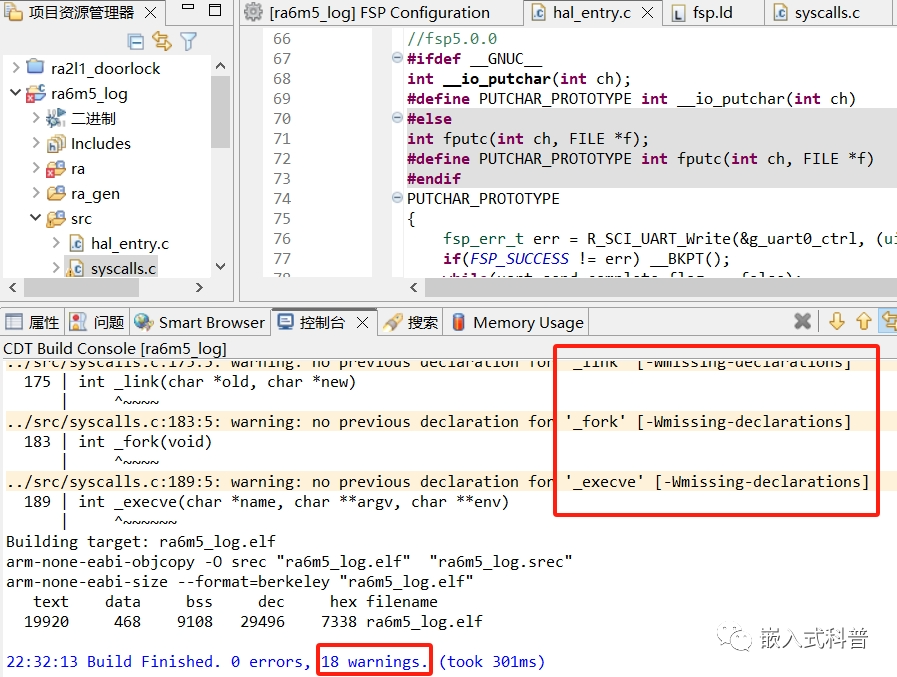
3.3.1 方法一
-
--specs=nosys.specs
-
可用,但有警告
?
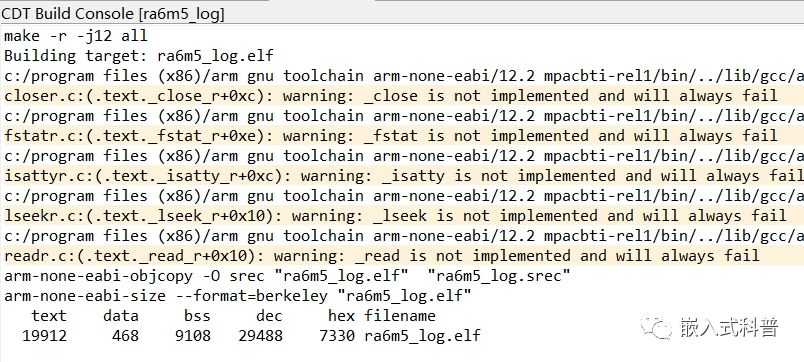
3.3.2 方法二
-
增加syscall.c解决警告
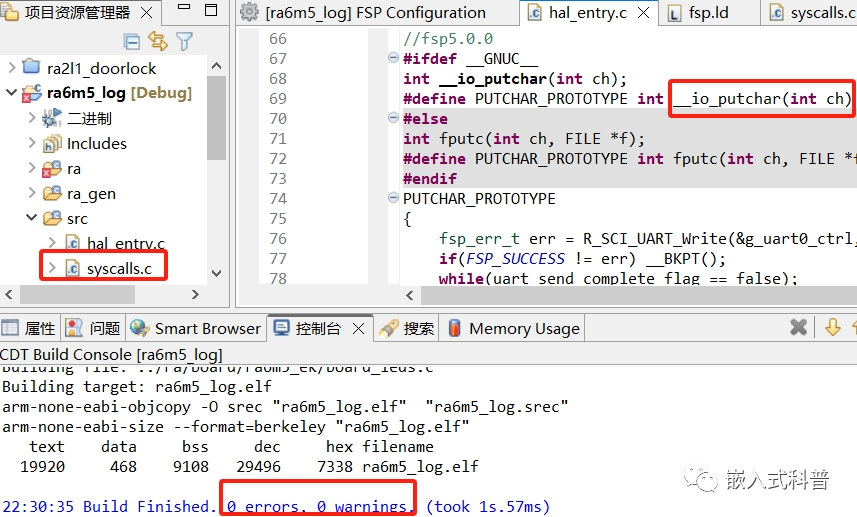
-
解决未定义警告

-
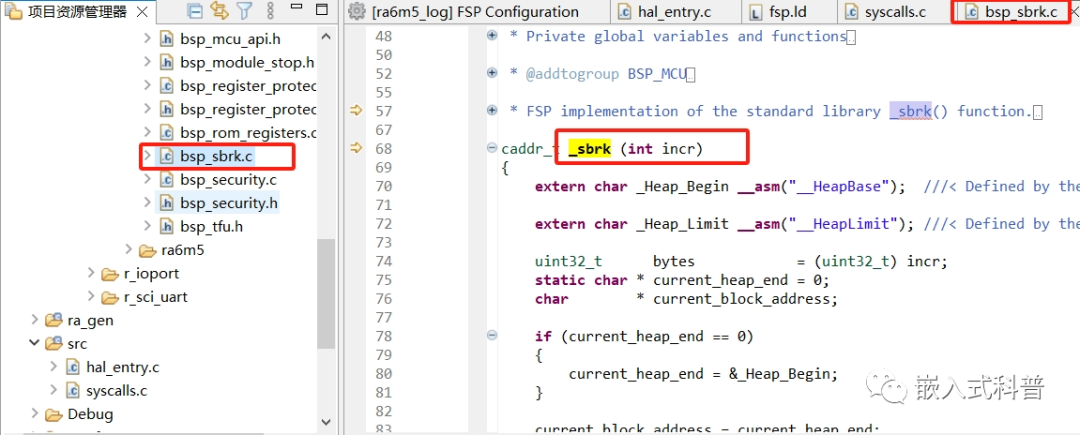
bsp_sbrk.c文件
-
完美解决,新旧兼容
源码整理:printf重定向、syscall函数声明、例程ra6m5_log
//fsp5.0.0
#ifdef __GNUC__
int __io_putchar(int ch);
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
int fputc(int ch, FILE *f);
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
fsp_err_t err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false);
uart_send_complete_flag = false;
return ch;
}
#if 1
void initialise_monitor_handles();
int _getpid(void);
int _getpid(void);
int _kill(int pid, int sig);
void _exit (int status);
__attribute__((weak)) int _read(int file, char *ptr, int len);
__attribute__((weak)) int _write(int file, char *ptr, int len);
int _close(int file);
int _fstat(int file, struct stat *st);
int _isatty(int file);
int _lseek(int file, int ptr, int dir);
int _open(char *path, int flags, ...);
int _wait(int *status);
int _unlink(char *name);
int _times(struct tms *buf);
int _stat(char *file, struct stat *st);
int _link(char *old, char *new);
int _fork(void);
int _execve(char *name, char **argv, char **env);
#endif
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!