FreeRTOS分辨数据源
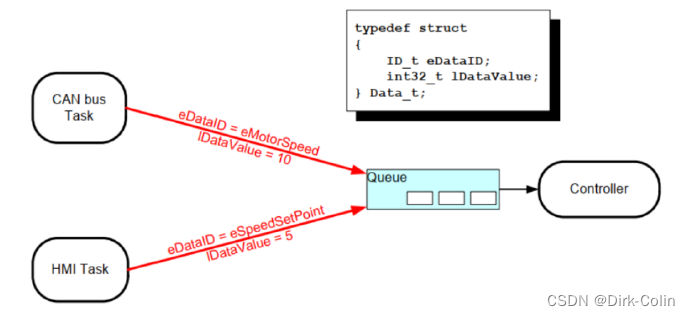
????????当有多个发送任务,通过同一个队列发出数据,接收任务如何分辨数据来源?数据本身带有"来源"信息,比如写入队列的数据是一个结构体,结构体中的lDataSouceID用来表示数据来源:
typedef struct {
ID_t eDataID;
int32_t lDataValue;
}Data_t;????????不同的发送任务,先构造好结构体,填入自己的eDataID ,再写队列;接收任务读出数据后,根据eDataID 就可以知道数据来源了,如下图所示:
CAN任务发送的数据:eDataID=eMotorSpeed
HMI任务发送的数据:eDataID=eSpeedSetPoint
????????创建的队列,用来发送结构体:数据大小是结构体的大小
????????发送任务优先级为2,分别往队列中写入自己的结构体,结构体中会标明数据来源
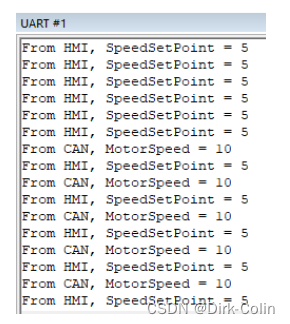
????????接收任务优先级为1,读队列、根据数据来源打印信息
/* 定义2种数据来源(ID) */
typedef enum
{
eMotorSpeed,
eSpeedSetPoint
} ID_t;
/* 定义在队列中传输的数据的格式 */
typedef struct
{
ID_t eDataID;
int32_t lDataValue;
}Data_t;
/* 定义2个结构体 */
static const Data_t xStructsToSend[ 2 ] =
{
{ eMotorSpeed, 10 }, /* CAN任务发送的数据 */
{ eSpeedSetPoint, 5 } /* HMI任务发送的数据 */
};
/* vSenderTask被用来创建2个任务,用于写队列
* vReceiverTask被用来创建1个任务,用于读队列
*/
static void vSenderTask( void *pvParameters );
static void vReceiverTask( void *pvParameters );
/*-----------------------------------------------------------*/
/* 队列句柄, 创建队列时会设置这个变量 */
QueueHandle_t xQueue;
int main( void )
{
prvSetupHardware();
/* 创建队列: 长度为5,数据大小为4字节(存放一个整数) */
xQueue = xQueueCreate( 5, sizeof( Data_t ) );
if( xQueue != NULL )
{
/* 创建2个任务用于写队列, 传入的参数是不同的结构体地址
* 任务函数会连续执行,向队列发送结构体
* 优先级为2
*/
xTaskCreate(vSenderTask, "CAN Task", 1000,
(void *) & (xStructsToSend[0]), 2, NULL);
xTaskCreate(vSenderTask, "HMI Task", 1000,
(void *) &(xStructsToSend[1]), 2, NULL);
/* 创建1个任务用于读队列
* 优先级为1, 低于上面的两个任务
* 这意味着发送任务优先写队列,队列常常是满的状态
*/
xTaskCreate( vReceiverTask, "Receiver", 1000, NULL, 1, NULL );
/* 启动调度器 */
vTaskStartScheduler();
}
else
{
/* 无法创建队列 */
}
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}static void vSenderTask( void *pvParameters )
{
BaseType_t xStatus;
const TickType_t xTicksToWait = pdMS_TO_TICKS( 100UL );
/* 无限循环 */
for( ;; )
{
/* 写队列
* xQueue: 写哪个队列
* pvParameters: 写什么数据? 传入数据的地址, 会从这个地址把数据复制进队列
* xTicksToWait: 如果队列满的话, 阻塞一会
*/
xStatus = xQueueSendToBack( xQueue, pvParameters, xTicksToWait );
if( xStatus != pdPASS )
{
printf( "Could not send to the queue.\r\n" );
}
}
}
static void vReceiverTask( void *pvParameters )
{
/* 读取队列时, 用这个变量来存放数据 */
Data_t xReceivedStructure;
BaseType_t xStatus;
/* 无限循环 */
for( ;; )
{
/* 读队列
* xQueue: 读哪个队列
* &xReceivedStructure: 读到的数据复制到这个地址
* 0: 没有数据就即刻返回,不阻塞
*/
xStatus = xQueueReceive( xQueue, &xReceivedStructure, 0 );
if( xStatus == pdPASS )
{
/* 读到了数据 */
if( xReceivedStructure.eDataID == eMotorSpeed )
{
printf( "From CAN, MotorSpeed = %d\r\n",
xReceivedStructure.lDataValue );
}
else if( xReceivedStructure.eDataID == eSpeedSetPoint )
{
printf( "From HMI, SpeedSetPoint = %d\r\n",
xReceivedStructure.lDataValue );
}
}
else
{
/* 没读到数据 */
printf( "Could not receive from the queue.\r\n" );
}
}
}
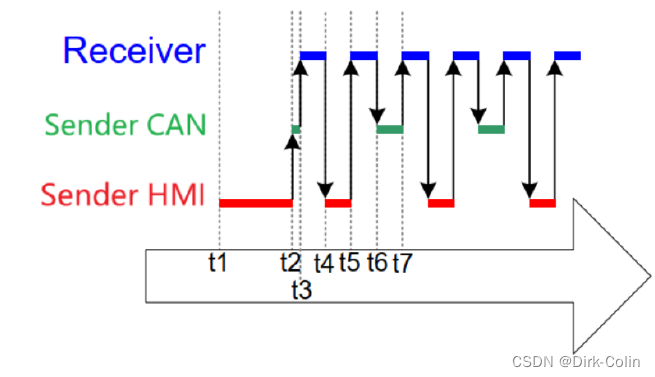
任务调度情况如下图所示:
????????t1:HMI是最后创建的最高优先级任务,它先执行,一下子向队列写入5个数据,把队列都写满了
????????t2:队列已经满了,HMI任务再发起第6次写操作时,进入阻塞状态。这时CAN任务是最高优先级的就绪态任务,它开始执行
????????t3:CAN任务发现队列已经满了,进入阻塞状态;接收任务变为最高优先级的就绪态任务,它开始运行
????????t4:现在,HMI任务、CAN任务的优先级都比接收任务高,它们都在等待队列有空闲的空间;一旦接收任务读出1个数据,会马上被抢占。被谁抢占?谁等待最久?HMI任务!所以在t4时刻,切换到HMI任务。
????????t5:HMI任务向队列写入第6个数据,然后再次阻塞,这时CAN任务已经阻塞很久了。接收任务变为最高优先级的就绪态任务,开始执行。
????????t6:现在,HMI任务、CAN任务的优先级都比接收任务高,它们都在等待队列有空闲的空间;一旦接收任务读出1个数据,会马上被抢占。被谁抢占?谁等待最久?CAN任务!所以在t6时刻,切换到CAN任务。
????????t7:CAN任务向队列写入数据,因为仅仅有一个空间供写入,所以它马上再次进入阻塞状态。这时HMI任务、CAN任务都在等待空闲空间,只有接收任务可以继续执行。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!