camera 客观校准 (2)——抓图
2023-12-28 02:44:19
#灵感# 延续camera 客观校准 (1)——抓图,继续补充
noise calibration:
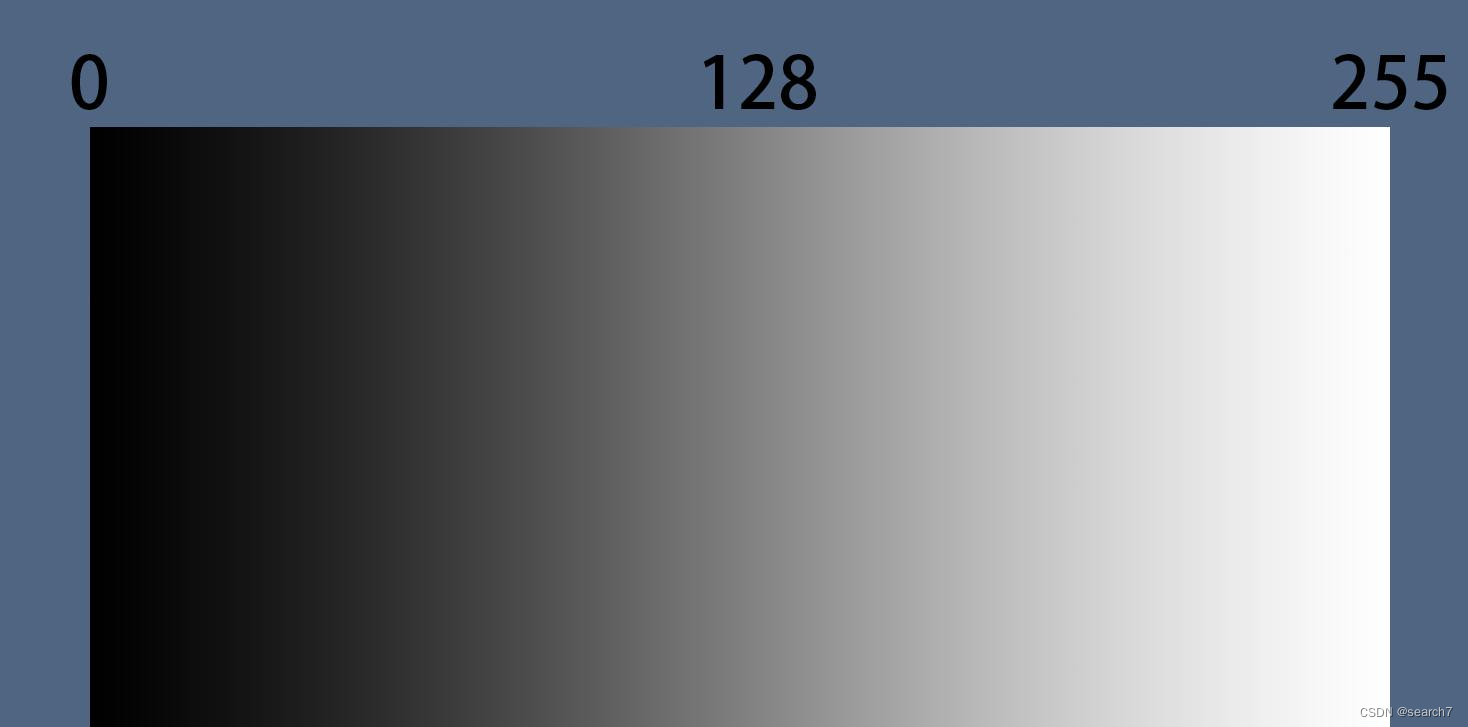
1、拍摄灰卡,一个光源(可以参考摄影那种竖着的灯管)垂直照射在灰卡一端,采集的图片亮度要渐变,亮度直方图最好覆盖从最亮到最暗。
使用工具读raw 的pixel 值,可以大概知道图像亮度范围。
如果想在抓raw之前,肉眼观察输出的图像亮度是否符合标准,要手动关闭和亮度调整相关的其它模块,比如histogram 、LTM、GTM、gamma、LSC等。

2、图像的亮度计算 = ISO * exposure , 可以合理调整这个乘的关系,来抓 ISO=1X, 2X,4X......的值。最好是使用 auto exposure, 调整灯的亮度,更好的获取实际的noise。而不是人为组合的
3、每个增益需要抓10-50帧的raw, 帧数越多,拟合出来的噪声曲线越精准。
👉,有的平台支持load 一条gamma 曲线,可以观察对噪声的影响。
CAC(Chromatic Aberration Correction)校准:
常使用点状图,拍摄时必须严格的点图中心对称,上下对称,左右对称。

依赖前提: AWB 是正确的。
dewarp:
棋盘图像必须对称,中心的水平线和垂直线必须是直线,横线要很水平,竖线要垂直。且不失真。
以画的+字为左右对称,上下对称,
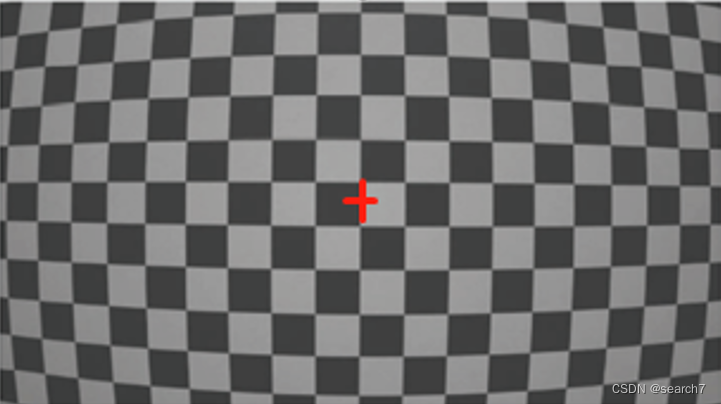
棋盘格图片需要填充整个图片,边界处不应有空白 ,最好是左右都有一条靠近边界的竖直的线。对焦 ok,棋盘格子尽可能的多。

文章来源:https://blog.csdn.net/search7/article/details/135244693
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!