基于双闭环PI的SMO无速度控制系统simulink建模与仿真
目录
1.课题概述
? ? ? ? 基于双闭环PI的SMO无速度控制系统simulink建模与仿真,基于双闭环PI的SMO无速度控制系统主要由两个闭环组成:一个是电流环,另一个是速度环。电流环作为内环,主要负责电流的快速跟踪控制;速度环作为外环,负责速度的精确控制。这种双闭环结构可以有效提高系统的动态性能和抗扰动能力。
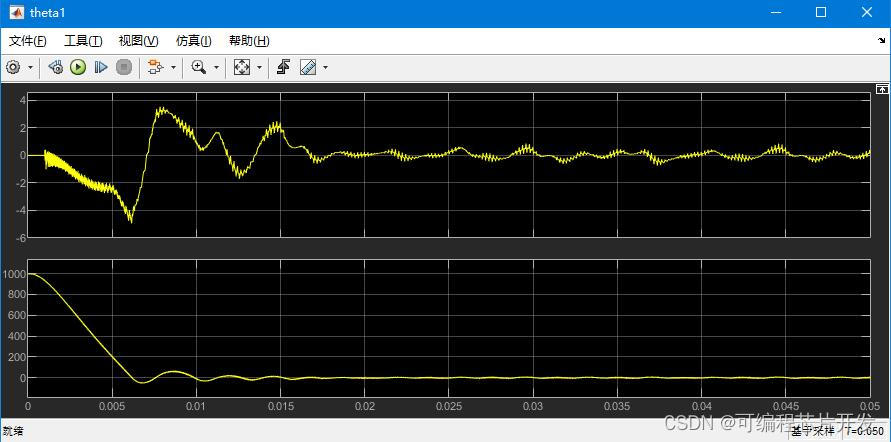
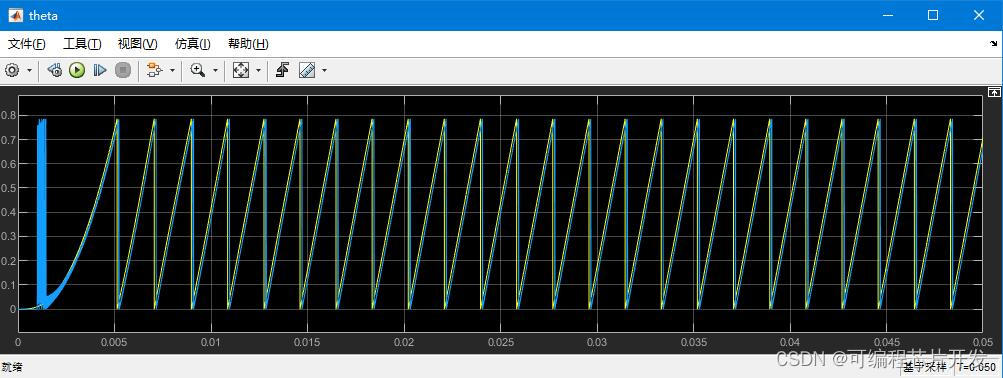
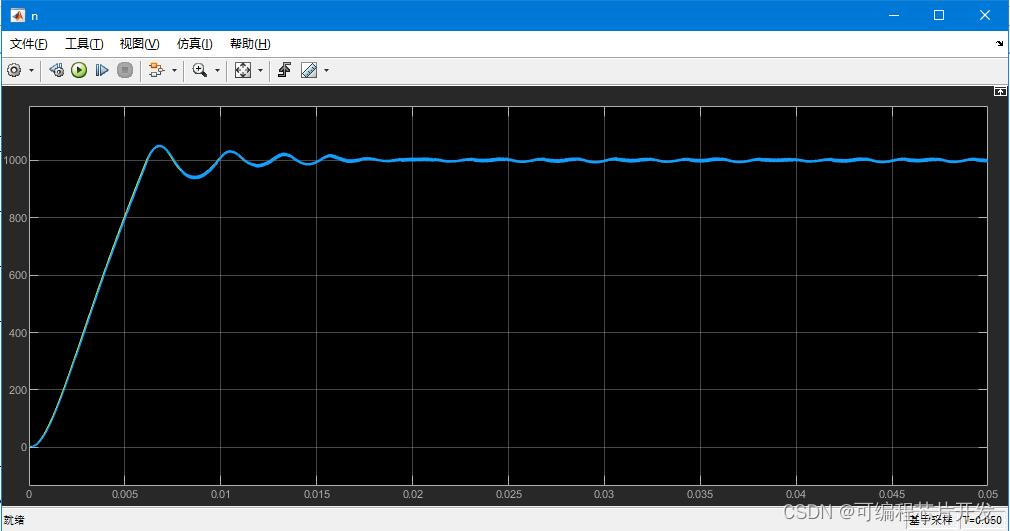
2.系统仿真结果
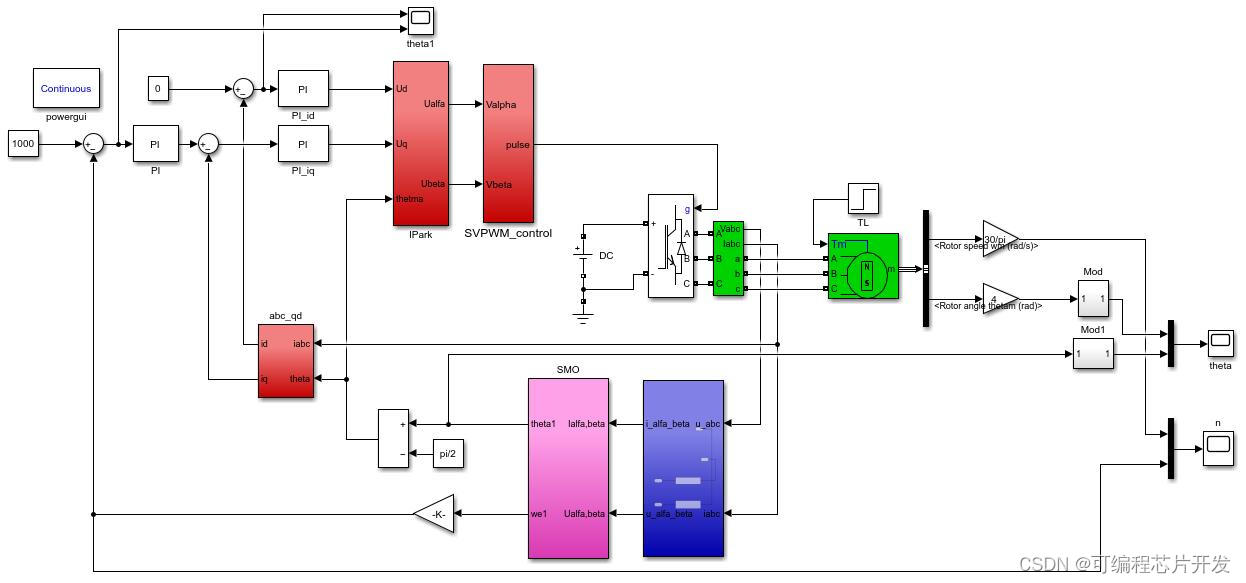
3.核心程序与模型
版本:MATLAB2022a
4.系统原理简介
? ? ? ? ?基于双闭环PI的SMO无速度控制系统是一个复杂但高效的控制策略,主要应用于电机控制领域,旨在提高系统的动态响应和稳态精度。下面将详细介绍其工作原理和相关数学公式。
一、系统概述
? ? ? ?基于双闭环PI的SMO无速度控制系统主要由两个闭环组成:一个是电流环,另一个是速度环。电流环作为内环,主要负责电流的快速跟踪控制;速度环作为外环,负责速度的精确控制。这种双闭环结构可以有效提高系统的动态性能和抗扰动能力。
二、电流环设计
? ? ? ?电流环的设计通常采用PI(比例-积分)控制器。给定电流指令id?和iq?与实际电流id和iq之间的误差分别经过PI控制器进行调节。PI控制器的输出作为PWM(脉宽调制)的输入,从而控制电机的电流。
PI控制器数学表达式:?

三、速度环设计
? ? ? ? ?速度环同样采用PI控制器,用于调节给定速度ω?与实际速度ω之间的误差。速度环的输出作为电流环的输入指令。
速度估算:
? ? ? ?在无速度传感器的情况下,系统通过SMO(滑模观测器)来估算电机的速度和位置。SMO基于电机的数学模型和滑模控制理论,通过测量电机的电流和电压来估算电机的速度和位置。
SMO数学模型:
? ? ? ?滑模观测器的设计涉及复杂的数学模型和控制理论,其核心思想是通过构造一个滑模面,使得系统状态在该面上滑动,从而实现对系统状态的观测。具体的数学模型和控制策略需要根据电机的具体类型和参数来设计。
四、双闭环协同工作
? ? ? ?双闭环结构通过电流环和速度环的协同工作,实现对电机速度和电流的精确控制。当速度发生变化时,速度环通过PI控制器调节电流指令,使电机能够快速响应并跟踪给定速度。同时,电流环确保电机电流的精确控制,从而提高系统的动态性能和稳态精度。
5.完整工程文件
v
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!