NNDL 作业13 优化算法3D可视化 [HBU]
老师作业原博客:【23-24 秋学期】NNDL 作业13 优化算法3D可视化-CSDN博客
编程实现优化算法,并3D可视化
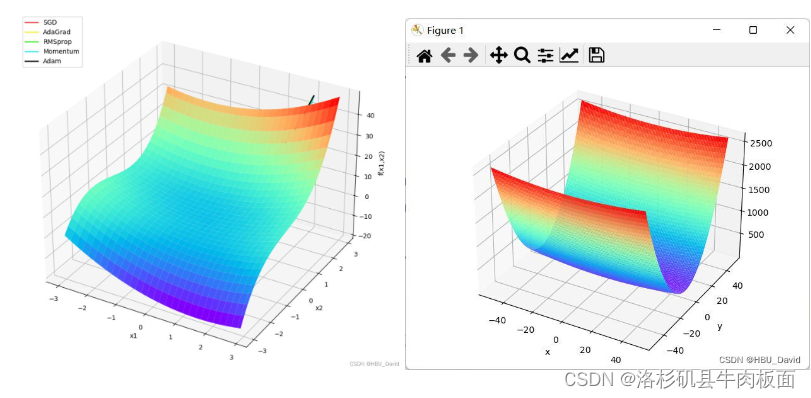
1. 函数3D可视化
分别画出?和?
的3D图
NNDL实验 优化算法3D轨迹 鱼书例题3D版_优化算法3d展示-CSDN博客
代码:
from mpl_toolkits.mplot3d import Axes3D
import numpy as np
from matplotlib import pyplot as plt
import torch
from nndl.op import Op
# 画出x**2
class OptimizedFunction3D(Op):
def __init__(self):
super(OptimizedFunction3D, self).__init__()
self.params = {'x': 0}
self.grads = {'x': 0}
def forward(self, x):
self.params['x'] = x
return x[0] ** 2 + x[1] ** 2 + x[1] ** 3 + x[0] * x[1]
def backward(self):
x = self.params['x']
gradient1 = 2 * x[0] + x[1]
gradient2 = 2 * x[1] + 3 * x[1] ** 2 + x[0]
grad1 = torch.Tensor([gradient1])
grad2 = torch.Tensor([gradient2])
self.grads['x'] = torch.cat([grad1, grad2])
# 使用numpy.meshgrid生成x1,x2矩阵,矩阵的每一行为[-3, 3],以0.1为间隔的数值
x1 = np.arange(-3, 3, 0.1)
x2 = np.arange(-3, 3, 0.1)
x1, x2 = np.meshgrid(x1, x2)
init_x = torch.Tensor(np.array([x1, x2]))
model = OptimizedFunction3D()
# 绘制 f_3d函数 的 三维图像
fig = plt.figure()
ax = plt.axes(projection='3d')
X = init_x[0].numpy()
Y = init_x[1].numpy()
Z = model(init_x).numpy()
ax.plot_surface(X, Y, Z, cmap='plasma')
ax.set_xlabel('x1')
ax.set_ylabel('x2')
ax.set_zlabel('f(x1,x2)')
plt.show()
# 画出x * x / 20 + y * y
def func(x, y):
return x * x / 20 + y * y
def paint_loss_func():
x = np.linspace(-50, 50, 100) # x的绘制范围是-50到50,从改区间均匀取100个数
y = np.linspace(-50, 50, 100) # y的绘制范围是-50到50,从改区间均匀取100个数
X, Y = np.meshgrid(x, y)
Z = func(X, Y)
fig = plt.figure() # figsize=(10, 10))
ax = Axes3D(fig)
plt.xlabel('x')
plt.ylabel('y')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='plasma')
plt.show()
paint_loss_func()结果:


2.加入优化算法,画出轨迹
分别画出?和?
的3D轨迹图
结合3D动画,用自己的语言,从轨迹、速度等多个角度讲解各个算法优缺点
NNDL实验 优化算法3D轨迹 pytorch版_nndl 实验三 将数据转换为 pytorch 张量-CSDN博客
代码为:
?
import torch
import numpy as np
import copy
from matplotlib import pyplot as plt
from matplotlib import animation
from itertools import zip_longest
from nndl.op import Op
class Optimizer(object): # 优化器基类
def __init__(self, init_lr, model):
"""
优化器类初始化
"""
# 初始化学习率,用于参数更新的计算
self.init_lr = init_lr
# 指定优化器需要优化的模型
self.model = model
def step(self):
"""
定义每次迭代如何更新参数
"""
pass
class SimpleBatchGD(Optimizer):
def __init__(self, init_lr, model):
super(SimpleBatchGD, self).__init__(init_lr=init_lr, model=model)
def step(self):
# 参数更新
if isinstance(self.model.params, dict):
for key in self.model.params.keys():
self.model.params[key] = self.model.params[key] - self.init_lr * self.model.grads[key]
class Adagrad(Optimizer):
def __init__(self, init_lr, model, epsilon):
"""
Adagrad 优化器初始化
输入:
- init_lr: 初始学习率 - model:模型,model.params存储模型参数值 - epsilon:保持数值稳定性而设置的非常小的常数
"""
super(Adagrad, self).__init__(init_lr=init_lr, model=model)
self.G = {}
for key in self.model.params.keys():
self.G[key] = 0
self.epsilon = epsilon
def adagrad(self, x, gradient_x, G, init_lr):
"""
adagrad算法更新参数,G为参数梯度平方的累计值。
"""
G += gradient_x ** 2
x -= init_lr / torch.sqrt(G + self.epsilon) * gradient_x
return x, G
def step(self):
"""
参数更新
"""
for key in self.model.params.keys():
self.model.params[key], self.G[key] = self.adagrad(self.model.params[key],
self.model.grads[key],
self.G[key],
self.init_lr)
class RMSprop(Optimizer):
def __init__(self, init_lr, model, beta, epsilon):
"""
RMSprop优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- beta:衰减率
- epsilon:保持数值稳定性而设置的常数
"""
super(RMSprop, self).__init__(init_lr=init_lr, model=model)
self.G = {}
for key in self.model.params.keys():
self.G[key] = 0
self.beta = beta
self.epsilon = epsilon
def rmsprop(self, x, gradient_x, G, init_lr):
"""
rmsprop算法更新参数,G为迭代梯度平方的加权移动平均
"""
G = self.beta * G + (1 - self.beta) * gradient_x ** 2
x -= init_lr / torch.sqrt(G + self.epsilon) * gradient_x
return x, G
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.G[key] = self.rmsprop(self.model.params[key],
self.model.grads[key],
self.G[key],
self.init_lr)
class Momentum(Optimizer):
def __init__(self, init_lr, model, rho):
"""
Momentum优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- rho:动量因子
"""
super(Momentum, self).__init__(init_lr=init_lr, model=model)
self.delta_x = {}
for key in self.model.params.keys():
self.delta_x[key] = 0
self.rho = rho
def momentum(self, x, gradient_x, delta_x, init_lr):
"""
momentum算法更新参数,delta_x为梯度的加权移动平均
"""
delta_x = self.rho * delta_x - init_lr * gradient_x
x += delta_x
return x, delta_x
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.delta_x[key] = self.momentum(self.model.params[key],
self.model.grads[key],
self.delta_x[key],
self.init_lr)
class Nesterov(Optimizer):
def __init__(self, init_lr, model, rho):
"""
Nesterov优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- rho:动量因子
"""
super(Nesterov, self).__init__(init_lr=init_lr, model=model)
self.delta_x = {}
for key in self.model.params.keys():
self.delta_x[key] = 0
self.rho = rho
def nesterov(self, x, gradient_x, delta_x, init_lr):
"""
Nesterov算法更新参数,delta_x为梯度的加权移动平均
"""
delta_x_prev = delta_x
delta_x = self.rho * delta_x - init_lr * gradient_x
x += -self.rho * delta_x_prev + (1 + self.rho) * delta_x
return x, delta_x
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.delta_x[key] = self.nesterov(self.model.params[key],
self.model.grads[key],
self.delta_x[key],
self.init_lr)
class Adam(Optimizer):
def __init__(self, init_lr, model, beta1, beta2, epsilon):
"""
Adam优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- beta1, beta2:移动平均的衰减率
- epsilon:保持数值稳定性而设置的常数
"""
super(Adam, self).__init__(init_lr=init_lr, model=model)
self.beta1 = beta1
self.beta2 = beta2
self.epsilon = epsilon
self.M, self.G = {}, {}
for key in self.model.params.keys():
self.M[key] = 0
self.G[key] = 0
self.t = 1
def adam(self, x, gradient_x, G, M, t, init_lr):
"""
adam算法更新参数
输入:
- x:参数
- G:梯度平方的加权移动平均
- M:梯度的加权移动平均
- t:迭代次数
- init_lr:初始学习率
"""
M = self.beta1 * M + (1 - self.beta1) * gradient_x
G = self.beta2 * G + (1 - self.beta2) * gradient_x ** 2
M_hat = M / (1 - self.beta1 ** t)
G_hat = G / (1 - self.beta2 ** t)
t += 1
x -= init_lr / torch.sqrt(G_hat + self.epsilon) * M_hat
return x, G, M, t
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.G[key], self.M[key], self.t = self.adam(self.model.params[key],
self.model.grads[key],
self.G[key],
self.M[key],
self.t,
self.init_lr)
class OptimizedFunction3D(Op):
def __init__(self):
super(OptimizedFunction3D, self).__init__()
self.params = {'x': 0}
self.grads = {'x': 0}
def forward(self, x):
self.params['x'] = x
return x[0] ** 2 + x[1] ** 2 + x[1] ** 3 + x[0] * x[1]
def backward(self):
x = self.params['x']
gradient1 = 2 * x[0] + x[1]
gradient2 = 2 * x[1] + 3 * x[1] ** 2 + x[0]
grad1 = torch.Tensor([gradient1])
grad2 = torch.Tensor([gradient2])
self.grads['x'] = torch.cat([grad1, grad2])
class Visualization3D(animation.FuncAnimation):
""" 绘制动态图像,可视化参数更新轨迹 """
def __init__(self, *xy_values, z_values, labels=[], colors=[], fig, ax, interval=600, blit=True, **kwargs):
"""
初始化3d可视化类
输入:
xy_values:三维中x,y维度的值
z_values:三维中z维度的值
labels:每个参数更新轨迹的标签
colors:每个轨迹的颜色
interval:帧之间的延迟(以毫秒为单位)
blit:是否优化绘图
"""
self.fig = fig
self.ax = ax
self.xy_values = xy_values
self.z_values = z_values
frames = max(xy_value.shape[0] for xy_value in xy_values)
self.lines = [ax.plot([], [], [], label=label, color=color, lw=2)[0]
for _, label, color in zip_longest(xy_values, labels, colors)]
super(Visualization3D, self).__init__(fig, self.animate, init_func=self.init_animation, frames=frames,
interval=interval, blit=blit, **kwargs)
def init_animation(self):
# 数值初始化
for line in self.lines:
line.set_data([], [])
# line.set_3d_properties(np.asarray([])) # 源程序中有这一行,加上会报错。 Edit by David 2022.12.4
return self.lines
def animate(self, i):
# 将x,y,z三个数据传入,绘制三维图像
for line, xy_value, z_value in zip(self.lines, self.xy_values, self.z_values):
line.set_data(xy_value[:i, 0], xy_value[:i, 1])
line.set_3d_properties(z_value[:i])
return self.lines
def train_f(model, optimizer, x_init, epoch):
x = x_init
all_x = []
losses = []
for i in range(epoch):
all_x.append(copy.deepcopy(x.numpy())) # 浅拷贝 改为 深拷贝, 否则List的原值会被改变。 Edit by David 2022.12.4.
loss = model(x)
losses.append(loss)
model.backward()
optimizer.step()
x = model.params['x']
return torch.Tensor(np.array(all_x)), losses
# 构建6个模型,分别配备不同的优化器
model1 = OptimizedFunction3D()
opt_gd = SimpleBatchGD(init_lr=0.01, model=model1)
model2 = OptimizedFunction3D()
opt_adagrad = Adagrad(init_lr=0.5, model=model2, epsilon=1e-7)
model3 = OptimizedFunction3D()
opt_rmsprop = RMSprop(init_lr=0.1, model=model3, beta=0.9, epsilon=1e-7)
model4 = OptimizedFunction3D()
opt_momentum = Momentum(init_lr=0.01, model=model4, rho=0.9)
model5 = OptimizedFunction3D()
opt_adam = Adam(init_lr=0.1, model=model5, beta1=0.9, beta2=0.99, epsilon=1e-7)
model6 = OptimizedFunction3D()
opt_Nesterov = Nesterov(init_lr=0.1, model=model6, rho=0.9)
models = [model1, model2, model3, model4, model5, model6]
opts = [opt_gd, opt_adagrad, opt_rmsprop, opt_momentum, opt_adam, opt_Nesterov]
x_all_opts = []
z_all_opts = []
# 使用不同优化器训练
for model, opt in zip(models, opts):
x_init = torch.FloatTensor([2, 3])
x_one_opt, z_one_opt = train_f(model, opt, x_init, 150) # epoch
# 保存参数值
x_all_opts.append(x_one_opt.numpy())
z_all_opts.append(np.squeeze(z_one_opt))
# 使用numpy.meshgrid生成x1,x2矩阵,矩阵的每一行为[-3, 3],以0.1为间隔的数值
x1 = np.arange(-3, 3, 0.1)
x2 = np.arange(-3, 3, 0.1)
x1, x2 = np.meshgrid(x1, x2)
init_x = torch.Tensor(np.array([x1, x2]))
model = OptimizedFunction3D()
# 绘制 f_3d函数 的 三维图像
fig = plt.figure()
ax = plt.axes(projection='3d')
X = init_x[0].numpy()
Y = init_x[1].numpy()
Z = model(init_x).numpy() # 改为 model(init_x).numpy() David 2022.12.4
ax.plot_surface(X, Y, Z, cmap='plasma')
ax.set_xlabel('x1')
ax.set_ylabel('x2')
ax.set_zlabel('f(x1,x2)')
labels = ['SGD', 'AdaGrad', 'RMSprop', 'Momentum', 'Adam', 'Nesterov']
colors = ['#8B0000', '#0000FF', '#000000', '#008B00', '#FF0000']
animator = Visualization3D(*x_all_opts, z_values=z_all_opts, labels=labels, colors=colors, fig=fig, ax=ax)
ax.legend(loc='upper left')
plt.show()
animator.save('animation.gif')

(一直整不出来动态图,先攒着,等过了期末考试再回来研究,最近实在是太忙了)
代码:
import torch
import numpy as np
import copy
from matplotlib import pyplot as plt
from matplotlib import animation
from itertools import zip_longest
from matplotlib import cm
class Op(object):
def __init__(self):
pass
def __call__(self, inputs):
return self.forward(inputs)
# 输入:张量inputs
# 输出:张量outputs
def forward(self, inputs):
# return outputs
raise NotImplementedError
# 输入:最终输出对outputs的梯度outputs_grads
# 输出:最终输出对inputs的梯度inputs_grads
def backward(self, outputs_grads):
# return inputs_grads
raise NotImplementedError
class Optimizer(object): # 优化器基类
def __init__(self, init_lr, model):
"""
优化器类初始化
"""
# 初始化学习率,用于参数更新的计算
self.init_lr = init_lr
# 指定优化器需要优化的模型
self.model = model
def step(self):
"""
定义每次迭代如何更新参数
"""
pass
class SimpleBatchGD(Optimizer):
def __init__(self, init_lr, model):
super(SimpleBatchGD, self).__init__(init_lr=init_lr, model=model)
def step(self):
# 参数更新
if isinstance(self.model.params, dict):
for key in self.model.params.keys():
self.model.params[key] = self.model.params[key] - self.init_lr * self.model.grads[key]
class Adagrad(Optimizer):
def __init__(self, init_lr, model, epsilon):
"""
Adagrad 优化器初始化
输入:
- init_lr: 初始学习率 - model:模型,model.params存储模型参数值 - epsilon:保持数值稳定性而设置的非常小的常数
"""
super(Adagrad, self).__init__(init_lr=init_lr, model=model)
self.G = {}
for key in self.model.params.keys():
self.G[key] = 0
self.epsilon = epsilon
def adagrad(self, x, gradient_x, G, init_lr):
"""
adagrad算法更新参数,G为参数梯度平方的累计值。
"""
G += gradient_x ** 2
x -= init_lr / torch.sqrt(G + self.epsilon) * gradient_x
return x, G
def step(self):
"""
参数更新
"""
for key in self.model.params.keys():
self.model.params[key], self.G[key] = self.adagrad(self.model.params[key],
self.model.grads[key],
self.G[key],
self.init_lr)
class RMSprop(Optimizer):
def __init__(self, init_lr, model, beta, epsilon):
"""
RMSprop优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- beta:衰减率
- epsilon:保持数值稳定性而设置的常数
"""
super(RMSprop, self).__init__(init_lr=init_lr, model=model)
self.G = {}
for key in self.model.params.keys():
self.G[key] = 0
self.beta = beta
self.epsilon = epsilon
def rmsprop(self, x, gradient_x, G, init_lr):
"""
rmsprop算法更新参数,G为迭代梯度平方的加权移动平均
"""
G = self.beta * G + (1 - self.beta) * gradient_x ** 2
x -= init_lr / torch.sqrt(G + self.epsilon) * gradient_x
return x, G
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.G[key] = self.rmsprop(self.model.params[key],
self.model.grads[key],
self.G[key],
self.init_lr)
class Momentum(Optimizer):
def __init__(self, init_lr, model, rho):
"""
Momentum优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- rho:动量因子
"""
super(Momentum, self).__init__(init_lr=init_lr, model=model)
self.delta_x = {}
for key in self.model.params.keys():
self.delta_x[key] = 0
self.rho = rho
def momentum(self, x, gradient_x, delta_x, init_lr):
"""
momentum算法更新参数,delta_x为梯度的加权移动平均
"""
delta_x = self.rho * delta_x - init_lr * gradient_x
x += delta_x
return x, delta_x
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.delta_x[key] = self.momentum(self.model.params[key],
self.model.grads[key],
self.delta_x[key],
self.init_lr)
class Nesterov(Optimizer):
def __init__(self, init_lr, model, rho):
"""
Nesterov优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- rho:动量因子
"""
super(Nesterov, self).__init__(init_lr=init_lr, model=model)
self.delta_x = {}
for key in self.model.params.keys():
self.delta_x[key] = 0
self.rho = rho
def nesterov(self, x, gradient_x, delta_x, init_lr):
"""
Nesterov算法更新参数,delta_x为梯度的加权移动平均
"""
delta_x_prev = delta_x
delta_x = self.rho * delta_x - init_lr * gradient_x
x += -self.rho * delta_x_prev + (1 + self.rho) * delta_x
return x, delta_x
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.delta_x[key] = self.nesterov(self.model.params[key],
self.model.grads[key],
self.delta_x[key],
self.init_lr)
class Adam(Optimizer):
def __init__(self, init_lr, model, beta1, beta2, epsilon):
"""
Adam优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- beta1, beta2:移动平均的衰减率
- epsilon:保持数值稳定性而设置的常数
"""
super(Adam, self).__init__(init_lr=init_lr, model=model)
self.beta1 = beta1
self.beta2 = beta2
self.epsilon = epsilon
self.M, self.G = {}, {}
for key in self.model.params.keys():
self.M[key] = 0
self.G[key] = 0
self.t = 1
def adam(self, x, gradient_x, G, M, t, init_lr):
"""
adam算法更新参数
输入:
- x:参数
- G:梯度平方的加权移动平均
- M:梯度的加权移动平均
- t:迭代次数
- init_lr:初始学习率
"""
M = self.beta1 * M + (1 - self.beta1) * gradient_x
G = self.beta2 * G + (1 - self.beta2) * gradient_x ** 2
M_hat = M / (1 - self.beta1 ** t)
G_hat = G / (1 - self.beta2 ** t)
t += 1
x -= init_lr / torch.sqrt(G_hat + self.epsilon) * M_hat
return x, G, M, t
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.G[key], self.M[key], self.t = self.adam(self.model.params[key],
self.model.grads[key],
self.G[key],
self.M[key],
self.t,
self.init_lr)
class OptimizedFunction3D(Op):
def __init__(self):
super(OptimizedFunction3D, self).__init__()
self.params = {'x': 0}
self.grads = {'x': 0}
def forward(self, x):
self.params['x'] = x
return x[0] * x[0] / 20 + x[1] * x[1] / 1
# return x[0] ** 2 + x[1] ** 2 + x[1] ** 3 + x[0] * x[1]
def backward(self):
x = self.params['x']
gradient1 = 2 * x[0] / 20
gradient2 = 2 * x[1] / 1
grad1 = torch.Tensor([gradient1])
grad2 = torch.Tensor([gradient2])
self.grads['x'] = torch.cat([grad1, grad2])
class Visualization3D(animation.FuncAnimation):
""" 绘制动态图像,可视化参数更新轨迹 """
def __init__(self, *xy_values, z_values, labels=[], colors=[], fig, ax, interval=100, blit=True, **kwargs):
"""
初始化3d可视化类
输入:
xy_values:三维中x,y维度的值
z_values:三维中z维度的值
labels:每个参数更新轨迹的标签
colors:每个轨迹的颜色
interval:帧之间的延迟(以毫秒为单位)
blit:是否优化绘图
"""
self.fig = fig
self.ax = ax
self.xy_values = xy_values
self.z_values = z_values
frames = max(xy_value.shape[0] for xy_value in xy_values)
self.lines = [ax.plot([], [], [], label=label, color=color, lw=2)[0]
for _, label, color in zip_longest(xy_values, labels, colors)]
self.points = [ax.plot([], [], [], color=color, markeredgewidth=1, markeredgecolor='black', marker='o')[0]
for _, color in zip_longest(xy_values, colors)]
# print(self.lines)
super(Visualization3D, self).__init__(fig, self.animate, init_func=self.init_animation, frames=frames,
interval=interval, blit=blit, **kwargs)
def init_animation(self):
# 数值初始化
for line in self.lines:
line.set_data_3d([], [], [])
for point in self.points:
point.set_data_3d([], [], [])
return self.points + self.lines
def animate(self, i):
# 将x,y,z三个数据传入,绘制三维图像
for line, xy_value, z_value in zip(self.lines, self.xy_values, self.z_values):
line.set_data_3d(xy_value[:i, 0], xy_value[:i, 1], z_value[:i])
for point, xy_value, z_value in zip(self.points, self.xy_values, self.z_values):
point.set_data_3d(xy_value[i, 0], xy_value[i, 1], z_value[i])
return self.points + self.lines
def train_f(model, optimizer, x_init, epoch):
x = x_init
all_x = []
losses = []
for i in range(epoch):
all_x.append(copy.deepcopy(x.numpy())) # 浅拷贝 改为 深拷贝, 否则List的原值会被改变。 Edit by David 2022.12.4.
loss = model(x)
losses.append(loss)
model.backward()
optimizer.step()
x = model.params['x']
return torch.Tensor(np.array(all_x)), losses
# 构建6个模型,分别配备不同的优化器
model1 = OptimizedFunction3D()
opt_gd = SimpleBatchGD(init_lr=0.95, model=model1)
model2 = OptimizedFunction3D()
opt_adagrad = Adagrad(init_lr=1.5, model=model2, epsilon=1e-7)
model3 = OptimizedFunction3D()
opt_rmsprop = RMSprop(init_lr=0.05, model=model3, beta=0.9, epsilon=1e-7)
model4 = OptimizedFunction3D()
opt_momentum = Momentum(init_lr=0.1, model=model4, rho=0.9)
model5 = OptimizedFunction3D()
opt_adam = Adam(init_lr=0.3, model=model5, beta1=0.9, beta2=0.99, epsilon=1e-7)
model6 = OptimizedFunction3D()
opt_Nesterov = Nesterov(init_lr=0.1, model=model6, rho=0.9) # 将 model4 改为 model6
models = [model1, model2, model3, model4, model5, model6]
opts = [opt_gd, opt_adagrad, opt_rmsprop, opt_momentum, opt_adam, opt_Nesterov]
x_all_opts = []
z_all_opts = []
# 使用不同优化器训练
for model, opt in zip(models, opts):
x_init = torch.FloatTensor([-7, 2])
x_one_opt, z_one_opt = train_f(model, opt, x_init, 100) # epoch
# 保存参数值
x_all_opts.append(x_one_opt.numpy())
z_all_opts.append(np.squeeze(z_one_opt))
# 使用numpy.meshgrid生成x1,x2矩阵,矩阵的每一行为[-3, 3],以0.1为间隔的数值
x1 = np.arange(-10, 10, 0.01)
x2 = np.arange(-5, 5, 0.01)
x1, x2 = np.meshgrid(x1, x2)
init_x = torch.Tensor(np.array([x1, x2]))
model = OptimizedFunction3D()
# 绘制 f_3d函数 的 三维图像
fig = plt.figure()
ax = plt.axes(projection='3d')
X = init_x[0].numpy()
Y = init_x[1].numpy()
Z = model(init_x).numpy() # 改为 model(init_x).numpy() David 2022.12.4
surf = ax.plot_surface(X, Y, Z, edgecolor='grey', cmap=cm.coolwarm)
# fig.colorbar(surf, shrink=0.5, aspect=1)
# ax.set_zlim(-3, 2)
ax.set_xlabel('x1')
ax.set_ylabel('x2')
ax.set_zlabel('f(x1,x2)')
labels = ['SGD', 'AdaGrad', 'RMSprop', 'Momentum', 'Adam', 'Nesterov']
colors = ['#8B0000', '#0000FF', '#000000', '#008B00', '#FF0000']
animator = Visualization3D(*x_all_opts, z_values=z_all_opts, labels=labels, colors=colors, fig=fig, ax=ax)
ax.legend(loc='upper right')
plt.show()
# animator.save('teaser' + '.gif', writer='imagemagick',fps=10) # 效果不好,估计被挡住了…… 有待进一步提高 Edit by David 2022.12.4图像结果:
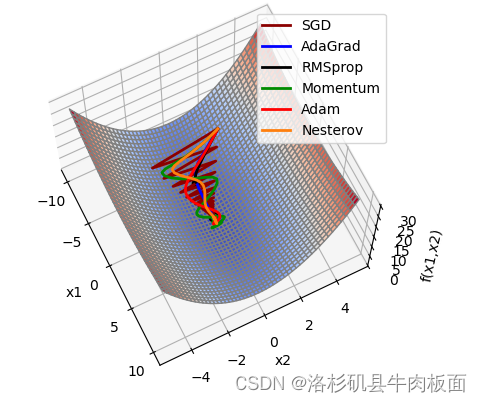

3.复现CS231经典动画
结合3D动画,用自己的语言,从轨迹、速度等多个角度讲解各个算法优缺点
NNDL实验 优化算法3D轨迹 复现cs231经典动画_深度学习 优化算法 动画展示-CSDN博客
Animations that may help your intuitions about the learning process dynamics.?
Left: Contours of a loss surface and time evolution of different optimization algorithms. Notice the "overshooting" behavior of momentum-based methods, which make the optimization look like a ball rolling down the hill.?
![]()

import torch
import numpy as np
import copy
from matplotlib import pyplot as plt
from matplotlib import animation
from itertools import zip_longest
from matplotlib import cm
class Op(object):
def __init__(self):
pass
def __call__(self, inputs):
return self.forward(inputs)
# 输入:张量inputs
# 输出:张量outputs
def forward(self, inputs):
# return outputs
raise NotImplementedError
# 输入:最终输出对outputs的梯度outputs_grads
# 输出:最终输出对inputs的梯度inputs_grads
def backward(self, outputs_grads):
# return inputs_grads
raise NotImplementedError
class Optimizer(object): # 优化器基类
def __init__(self, init_lr, model):
"""
优化器类初始化
"""
# 初始化学习率,用于参数更新的计算
self.init_lr = init_lr
# 指定优化器需要优化的模型
self.model = model
def step(self):
"""
定义每次迭代如何更新参数
"""
pass
class SimpleBatchGD(Optimizer):
def __init__(self, init_lr, model):
super(SimpleBatchGD, self).__init__(init_lr=init_lr, model=model)
def step(self):
# 参数更新
if isinstance(self.model.params, dict):
for key in self.model.params.keys():
self.model.params[key] = self.model.params[key] - self.init_lr * self.model.grads[key]
class Adagrad(Optimizer):
def __init__(self, init_lr, model, epsilon):
"""
Adagrad 优化器初始化
输入:
- init_lr: 初始学习率 - model:模型,model.params存储模型参数值 - epsilon:保持数值稳定性而设置的非常小的常数
"""
super(Adagrad, self).__init__(init_lr=init_lr, model=model)
self.G = {}
for key in self.model.params.keys():
self.G[key] = 0
self.epsilon = epsilon
def adagrad(self, x, gradient_x, G, init_lr):
"""
adagrad算法更新参数,G为参数梯度平方的累计值。
"""
G += gradient_x ** 2
x -= init_lr / torch.sqrt(G + self.epsilon) * gradient_x
return x, G
def step(self):
"""
参数更新
"""
for key in self.model.params.keys():
self.model.params[key], self.G[key] = self.adagrad(self.model.params[key],
self.model.grads[key],
self.G[key],
self.init_lr)
class RMSprop(Optimizer):
def __init__(self, init_lr, model, beta, epsilon):
"""
RMSprop优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- beta:衰减率
- epsilon:保持数值稳定性而设置的常数
"""
super(RMSprop, self).__init__(init_lr=init_lr, model=model)
self.G = {}
for key in self.model.params.keys():
self.G[key] = 0
self.beta = beta
self.epsilon = epsilon
def rmsprop(self, x, gradient_x, G, init_lr):
"""
rmsprop算法更新参数,G为迭代梯度平方的加权移动平均
"""
G = self.beta * G + (1 - self.beta) * gradient_x ** 2
x -= init_lr / torch.sqrt(G + self.epsilon) * gradient_x
return x, G
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.G[key] = self.rmsprop(self.model.params[key],
self.model.grads[key],
self.G[key],
self.init_lr)
class Momentum(Optimizer):
def __init__(self, init_lr, model, rho):
"""
Momentum优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- rho:动量因子
"""
super(Momentum, self).__init__(init_lr=init_lr, model=model)
self.delta_x = {}
for key in self.model.params.keys():
self.delta_x[key] = 0
self.rho = rho
def momentum(self, x, gradient_x, delta_x, init_lr):
"""
momentum算法更新参数,delta_x为梯度的加权移动平均
"""
delta_x = self.rho * delta_x - init_lr * gradient_x
x += delta_x
return x, delta_x
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.delta_x[key] = self.momentum(self.model.params[key],
self.model.grads[key],
self.delta_x[key],
self.init_lr)
class Nesterov(Optimizer):
def __init__(self, init_lr, model, rho):
"""
Nesterov优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- rho:动量因子
"""
super(Nesterov, self).__init__(init_lr=init_lr, model=model)
self.delta_x = {}
for key in self.model.params.keys():
self.delta_x[key] = 0
self.rho = rho
def nesterov(self, x, gradient_x, delta_x, init_lr):
"""
Nesterov算法更新参数,delta_x为梯度的加权移动平均
"""
delta_x_prev = delta_x
delta_x = self.rho * delta_x - init_lr * gradient_x
x += -self.rho * delta_x_prev + (1 + self.rho) * delta_x
return x, delta_x
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.delta_x[key] = self.nesterov(self.model.params[key],
self.model.grads[key],
self.delta_x[key],
self.init_lr)
class Adam(Optimizer):
def __init__(self, init_lr, model, beta1, beta2, epsilon):
"""
Adam优化器初始化
输入:
- init_lr:初始学习率
- model:模型,model.params存储模型参数值
- beta1, beta2:移动平均的衰减率
- epsilon:保持数值稳定性而设置的常数
"""
super(Adam, self).__init__(init_lr=init_lr, model=model)
self.beta1 = beta1
self.beta2 = beta2
self.epsilon = epsilon
self.M, self.G = {}, {}
for key in self.model.params.keys():
self.M[key] = 0
self.G[key] = 0
self.t = 1
def adam(self, x, gradient_x, G, M, t, init_lr):
"""
adam算法更新参数
输入:
- x:参数
- G:梯度平方的加权移动平均
- M:梯度的加权移动平均
- t:迭代次数
- init_lr:初始学习率
"""
M = self.beta1 * M + (1 - self.beta1) * gradient_x
G = self.beta2 * G + (1 - self.beta2) * gradient_x ** 2
M_hat = M / (1 - self.beta1 ** t)
G_hat = G / (1 - self.beta2 ** t)
t += 1
x -= init_lr / torch.sqrt(G_hat + self.epsilon) * M_hat
return x, G, M, t
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.G[key], self.M[key], self.t = self.adam(self.model.params[key],
self.model.grads[key],
self.G[key],
self.M[key],
self.t,
self.init_lr)
class OptimizedFunction3D(Op):
def __init__(self):
super(OptimizedFunction3D, self).__init__()
self.params = {'x': 0}
self.grads = {'x': 0}
def forward(self, x):
self.params['x'] = x
return - x[0] * x[0] / 2 + x[1] * x[1] / 1 # x[0] ** 2 + x[1] ** 2 + x[1] ** 3 + x[0] * x[1]
def backward(self):
x = self.params['x']
gradient1 = - 2 * x[0] / 2
gradient2 = 2 * x[1] / 1
grad1 = torch.Tensor([gradient1])
grad2 = torch.Tensor([gradient2])
self.grads['x'] = torch.cat([grad1, grad2])
class Visualization3D(animation.FuncAnimation):
""" 绘制动态图像,可视化参数更新轨迹 """
def __init__(self, *xy_values, z_values, labels=[], colors=[], fig, ax, interval=100, blit=True, **kwargs):
"""
初始化3d可视化类
输入:
xy_values:三维中x,y维度的值
z_values:三维中z维度的值
labels:每个参数更新轨迹的标签
colors:每个轨迹的颜色
interval:帧之间的延迟(以毫秒为单位)
blit:是否优化绘图
"""
self.fig = fig
self.ax = ax
self.xy_values = xy_values
self.z_values = z_values
frames = max(xy_value.shape[0] for xy_value in xy_values)
self.lines = [ax.plot([], [], [], label=label, color=color, lw=2)[0]
for _, label, color in zip_longest(xy_values, labels, colors)]
self.points = [ax.plot([], [], [], color=color, markeredgewidth=1, markeredgecolor='black', marker='o')[0]
for _, color in zip_longest(xy_values, colors)]
# print(self.lines)
super(Visualization3D, self).__init__(fig, self.animate, init_func=self.init_animation, frames=frames,
interval=interval, blit=blit, **kwargs)
def init_animation(self):
# 数值初始化
for line in self.lines:
line.set_data_3d([], [], [])
for point in self.points:
point.set_data_3d([], [], [])
return self.points + self.lines
def animate(self, i):
# 将x,y,z三个数据传入,绘制三维图像
for line, xy_value, z_value in zip(self.lines, self.xy_values, self.z_values):
line.set_data_3d(xy_value[:i, 0], xy_value[:i, 1], z_value[:i])
for point, xy_value, z_value in zip(self.points, self.xy_values, self.z_values):
point.set_data_3d(xy_value[i, 0], xy_value[i, 1], z_value[i])
return self.points + self.lines
def train_f(model, optimizer, x_init, epoch):
x = x_init
all_x = []
losses = []
for i in range(epoch):
all_x.append(copy.deepcopy(x.numpy())) # 浅拷贝 改为 深拷贝, 否则List的原值会被改变。 Edit by David 2022.12.4.
loss = model(x)
losses.append(loss)
model.backward()
optimizer.step()
x = model.params['x']
return torch.Tensor(np.array(all_x)), losses
# 构建5个模型,分别配备不同的优化器
model1 = OptimizedFunction3D()
opt_gd = SimpleBatchGD(init_lr=0.05, model=model1)
model2 = OptimizedFunction3D()
opt_adagrad = Adagrad(init_lr=0.05, model=model2, epsilon=1e-7)
model3 = OptimizedFunction3D()
opt_rmsprop = RMSprop(init_lr=0.05, model=model3, beta=0.9, epsilon=1e-7)
model4 = OptimizedFunction3D()
opt_momentum = Momentum(init_lr=0.05, model=model4, rho=0.9)
model5 = OptimizedFunction3D()
opt_adam = Adam(init_lr=0.05, model=model5, beta1=0.9, beta2=0.99, epsilon=1e-7)
model6 = OptimizedFunction3D()
opt_Nesterov = Nesterov(init_lr=0.1, model=model6, rho=0.9)
models = [model1, model2, model3, model4, model5, model6]
opts = [opt_gd, opt_adagrad, opt_rmsprop, opt_momentum, opt_adam, opt_Nesterov]
x_all_opts = []
z_all_opts = []
# 使用不同优化器训练
for model, opt in zip(models, opts):
x_init = torch.FloatTensor([0.00001, 0.5])
x_one_opt, z_one_opt = train_f(model, opt, x_init, 100) # epoch
# 保存参数值
x_all_opts.append(x_one_opt.numpy())
z_all_opts.append(np.squeeze(z_one_opt))
# 使用numpy.meshgrid生成x1,x2矩阵,矩阵的每一行为[-3, 3],以0.1为间隔的数值
x1 = np.arange(-1, 2, 0.01)
x2 = np.arange(-1, 1, 0.05)
x1, x2 = np.meshgrid(x1, x2)
init_x = torch.Tensor(np.array([x1, x2]))
model = OptimizedFunction3D()
# 绘制 f_3d函数 的 三维图像
fig = plt.figure()
ax = plt.axes(projection='3d')
X = init_x[0].numpy()
Y = init_x[1].numpy()
Z = model(init_x).numpy() # 改为 model(init_x).numpy() David 2022.12.4
surf = ax.plot_surface(X, Y, Z, edgecolor='grey', cmap=cm.coolwarm)
# fig.colorbar(surf, shrink=0.5, aspect=1)
ax.set_zlim(-3, 2)
ax.set_xlabel('x1')
ax.set_ylabel('x2')
ax.set_zlabel('f(x1,x2)')
labels = ['SGD', 'AdaGrad', 'RMSprop', 'Momentum', 'Adam', 'Nesterov']
colors = ['#8B0000', '#0000FF', '#000000', '#008B00', '#FF0000']
animator = Visualization3D(*x_all_opts, z_values=z_all_opts, labels=labels, colors=colors, fig=fig, ax=ax)
ax.legend(loc='upper right')
plt.show()
# animator.save('teaser' + '.gif', writer='imagemagick',fps=10) # 效果不好,估计被挡住了…… 有待进一步提高 Edit by David 2022.12.4
# save不好用,不费劲了,安装个软件做gif https://pc.qq.com/detail/13/detail_23913.html

4. 结合3D动画,用自己的语言,从轨迹、速度等多个角度讲解各个算法优缺点
SGD
SGD较于其他几个算法,速度相对较慢,会呈现“之”字型的轨迹,并且在cs231经典动画中,SGD出现了陷入局部最小值,出不来的情况。所以根据动画可以看出SGD的缺点有:
(1)容易陷入局部最优
(2)速度相对较慢且需要调整学习率
AdaGrad
可以看出,AdaGrad图中的轨迹图都是刚开始速度明显大于RMSprop和SGD算法的,偶尔比Momentum和Nesterov还要快,但是随着时间的增长,AdaGrad会成为图中速度最慢的算法。方向上,该算法的方向一直都很准确,并且明显解决了SGD的“之”字型问题,收敛稳定。相较于SGD算法,AdaGrad的优点:
(1)自适应算法:AdaGrad算法根据每个参数的历史梯度信息来自适应地调整学习率,使得梯度不会太大或太小。
(2)“之”字形的变动程度衰减,呈现稳定的向最优点收敛
缺点:
学习率衰减过快,可能发生早停现象:随着训练的进行,AdaGrad会累积历史梯度的平方和,导致学习率不断减小。在训练后期,学习率可能会变得非常小,甚至接近于零,导致训练过早停止。
RMSprop
RMSprop的轨迹图,速度上很稳定,在前期比AdaGrad要慢,但是后期AdaGrad很慢的时候,RMSprop依然稳定前进。在轨迹方向上,基本和AdaGrad是一样的。所以相较于AdaGrad而言,RMSprop在它的基础上进行改进,优点为:
收敛速度快解决了AdaGrad算法的早停问题: 引入了衰减率,不会一直累积梯度平方,而是通过梯度平方的指数衰减移动平均来调整学习率,解决了AdaGrad的早衰问题。
Momentum
Momentum算法在速度上,要明显快于前几个函数,跟Nesterov差不多,但是在方向上,Momentum算法每次都是去错的方向转几次,然后才能修正过来。所以Momentum的优点为:很快的收敛速度,特别是对于类似鞍点的问题,由于动量维持了运动,能够更有效地收敛至局部最小值或平坦区域。但是方向要相对差些,之前的动量仍然会对下一次的下降造成影响,导致Momentum其实有一点大幅度的“之”字型的轨迹。
Nesterov
Nesterov算法的方向和速度效果都是很好的,速度上,它是最快的;方向上,轨迹正确性要好于Momentum,但是仍然要比AdaGrad、RMSprop要差些。Nesterov是对Momentum进行的改进,不仅仅根据当前梯度调整位置,而是根据当前动量在预期的未来位置计算梯度。它的优点为速度快且轨迹呈现出更加平滑、更有方向性的路径朝向最优点。
Adam
根据3D轨迹图:Adam算法的轨迹为稳定,快速的向最小值收敛,就速度和方向的正确性、稳定性而言,都是居中。所以Adam算法的优点就是结合了调整学习率的算法:RMSprop和梯度估计修正算法:Momentum二者的优点:稳定、快速,实用性较高。?
?
这是我的另一篇博客总结的优化算法,需要期末复习的同学可以点击链接:

动图我一直贴不上去,考完试了回来研究研究,怎么才能贴上动图。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!