ROS+moveit+jakaminicob仿真运动
2024-01-07 18:50:52
先浅浅的放一个官方的c++文档:
Motion Planning API — moveit_tutorials Melodic documentation
目录
一、实现运动到目标点的程序
(等我得空了补一个c++运行环境部署说明)
#include <moveit/move_group_interface/move_group_interface.h>
#include <moveit/planning_scene_interface/planning_scene_interface.h>
#include <moveit_msgs/DisplayRobotState.h>
#include <moveit_msgs/DisplayTrajectory.h>
#include <moveit_msgs/AttachedCollisionObject.h>
#include <moveit_msgs/CollisionObject.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
#include <motion_planning.h>
#include <iostream>
#include <math.h>
#include <vector>
#include <cmath>
#include <Eigen/Dense>
#include <fstream>
// #include <inv_2.cpp>
using namespace Eigen;
int main(int argc, char** argv)
{
//ros初始化需要的几行代码,创建一个 ROS 节点(Node),并启动一个异步的 ROS spinner。
ros::init(argc, argv, "move_group_interface_tutorial_zyw");
ros::NodeHandle node_handle;
ros::AsyncSpinner spinner(1);
spinner.start();
//这是我们操作的关节
static const std::string PLANNING_GROUP = "arm_group";
moveit::planning_interface::MoveGroupInterface move_group(PLANNING_GROUP);
// // 原始指针经常被用来指代计划组以改进性能
const robot_state::JointModelGroup* joint_model_group =move_group.getCurrentState()->getJointModelGroup(PLANNING_GROUP);
// 设置目标位置
geometry_msgs::Pose target_pose1;
target_pose1.orientation.w = 0.0654579;
target_pose1.orientation.x = 0.0654572;
target_pose1.orientation.y = 0.704072;
target_pose1.orientation.z = -0.704069;
target_pose1.position.x = 0.28;
target_pose1.position.y = -0.2;
target_pose1.position.z = 0.1;
move_group.setPoseTarget(target_pose1);
//plan
moveit::planning_interface::MoveGroupInterface::Plan my_plan;
bool success = (move_group.plan(my_plan) == moveit::planning_interface::MoveItErrorCode::SUCCESS);
if (success) {
//执行
move_group.execute(my_plan);
} else {
ROS_WARN("Failed to plan and execute the trajectory.");
}
return 0;
}二、在rviz里面新建扫描平台
1.效果图:
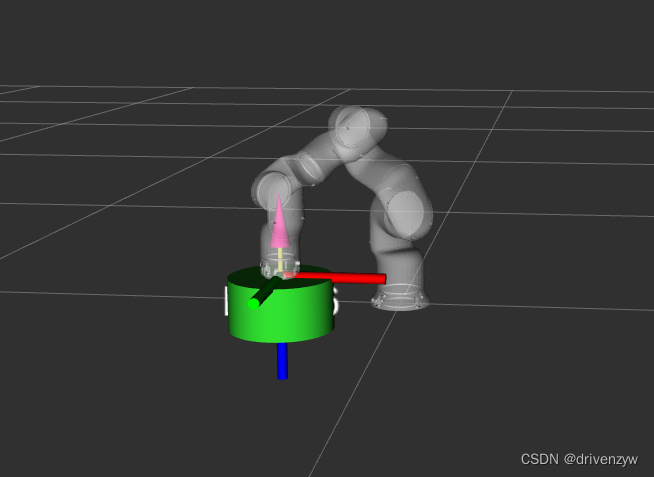
2.代码 :
ros::Publisher planning_scene_diff_publisher = node_handle.advertise<moveit_msgs::PlanningScene>("planning_scene", 1);
ros::Rate loop_rate(10);
while (ros::ok())
{
//创建一个物体
moveit_msgs::CollisionObject collision_object;
collision_object.header.frame_id = move_group.getPlanningFrame();
moveit::planning_interface::PlanningSceneInterface planning_scene_interface;
// The id of the object is used to identify it.
//id必须设置
collision_object.id = "box1";
// Define a box to add to the world.
shape_msgs::SolidPrimitive primitive;
primitive.type= primitive.CYLINDER;
primitive.dimensions.resize(2);
//dimensions[0]控制高度的
primitive.dimensions[0] = 0.1;
//dimensions[1]控制半径的
primitive.dimensions[1] = 0.1;
// Define a pose for the box (specified relative to frame_id)
geometry_msgs::Pose box_pose;
box_pose.orientation.w = 1.0;
//圆柱中心点的距离
box_pose.position.x = 0.2;
box_pose.position.y = 0.2;
box_pose.position.z = 0.05;
collision_object.primitives.push_back(primitive);
collision_object.primitive_poses.push_back(box_pose);
std::vector<moveit_msgs::CollisionObject> collision_objects;
collision_objects.push_back(collision_object);
//定义操作为添加
collision_object.operation = collision_object.ADD;
//定义一个PlanningScene消息
moveit_msgs::PlanningScene planning_scene;
planning_scene.world.collision_objects.push_back(collision_object);
planning_scene.is_diff = true;
//发布该消息
planning_scene_diff_publisher.publish(planning_scene);
loop_rate.sleep();
}
3.代码的简单说明
这部分代码不包括机械臂的初始化和头文件的引用(如果有小朋友不懂这个,可以去看我在开头引入的官方文档,官方文档给了你两个功能包,moveit_tutorials和panda_moveit_config。你clone到本地打开,在moveit_tutorials/doc/move_group_interface/src/move_group_interface_tutorial.cpp里面有机械臂的初始化代码,然后你自己如过不会写cmakelist文件,可以直接用moveit_tutorials的cmakelist文件,当然你也可以直接用我在一里面写的代码),只是物体的新建和主题的发布。物体的新建可以去看看shape_msgs::SolidPrimitive的官方文档,里面有设置形状、位置等参数的说明。
shape_msgs/SolidPrimitive Documentation
4.参考文章:
文章来源:https://blog.csdn.net/drivenzyw/article/details/135428013
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!