高翔《自动驾驶与机器人中的SLAM技术》第九、十章载入静态地图完成点云匹配重定位
2023-12-14 15:38:23
修改mapping.yaml文件中bag_path:?

完成之后会产生一系列的点云文件以及Keyframe.txt文件:??
./bin/run_frontend --config_yaml ./config/mapping ?
?
生成拼接的点云地图map.pcd文件?:?
./bin/dump_map --pose_source=lidar? 。、
。、
?完成第一次优化:?
./bin/run_optimization --stage=1
完成回环检测:??
./bin/run_loopclosure ?
?
完成第二轮优化:??
./bin/run_optimization --stage=2?
完成优化后的地图拼接:?
./bin/dump_map --pose_spurce opti2?
?完成地图的导出及切片,导出的点云文件在map_data文件夹中:
./bin/split_map?
导入地图并基于先验地图进行地图的加载和卸载,以及点云配准定位:
./bin/run_fusion_offline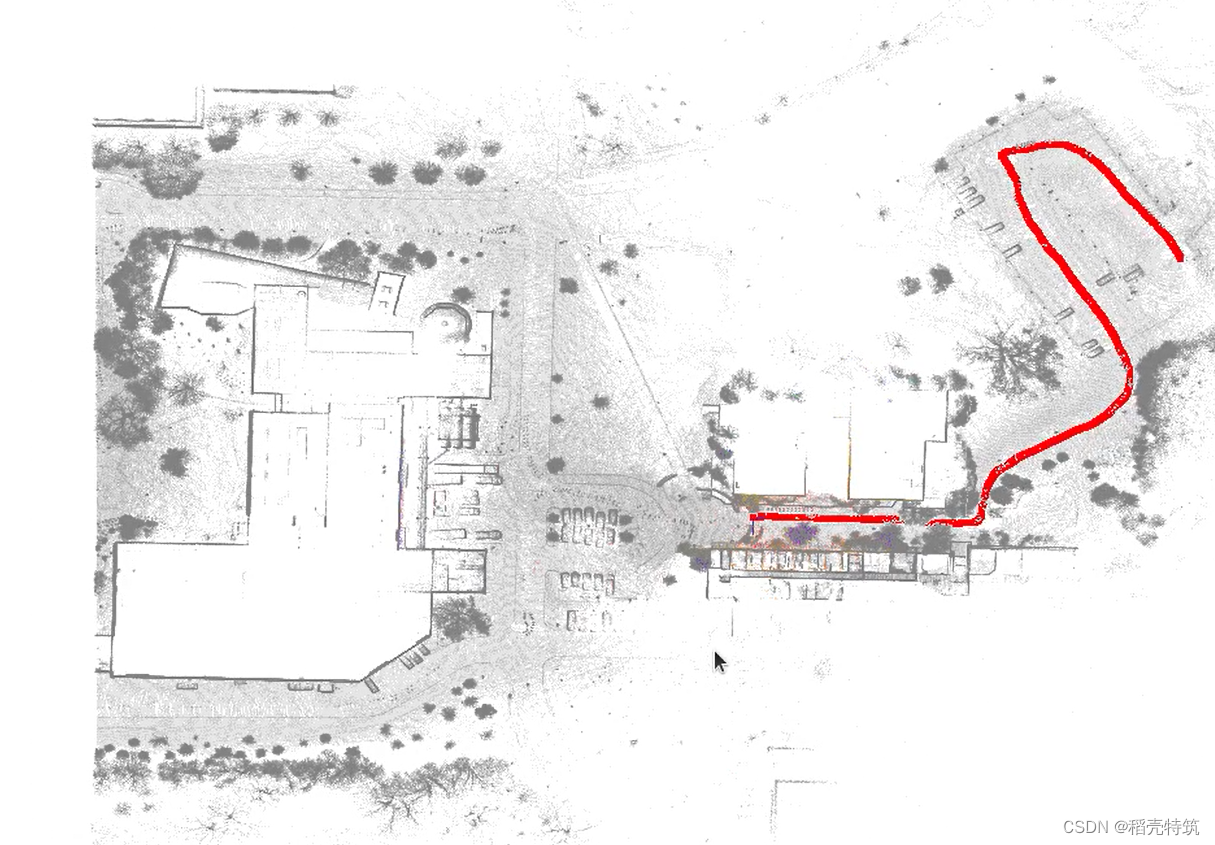
文章来源:https://blog.csdn.net/neptune4751/article/details/134787935
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!