ros2+topics主题通讯
Understanding topics?
Goal:?Use rqt_graph and command line tools to introspect ROS 2 topics.
Tutorial level:?Beginner
Time:?20 minutes
ROS 2 breaks complex systems down into many modular nodes. Topics are a vital element of the ROS graph that act as a bus for nodes to exchange messages.
A node may publish data to any number of topics and simultaneously have subscriptions to any number of topics.
Topics are one of the main ways in which data is moved between nodes and therefore between different parts of the system.
Prerequisites准备条件?
The?previous tutorial?provides some useful background information on nodes that is built upon here.
As always, don’t forget to source ROS 2 in?every new terminal you open.
1 Setup?
By now you should be comfortable starting up turtlesim.
Open a new terminal and run:
ros2 run turtlesim turtlesim_node
Open another terminal and run:
ros2 run turtlesim turtle_teleop_key

Recall from the?previous tutorial?that the names of these nodes are?/turtlesim?and?/teleop_turtle?by default.
2 rqt_graph?
Throughout this tutorial, we will use?rqt_graph?to visualize the changing nodes and topics, as well as the connections between them.
The?turtlesim tutorial?tells you how to install rqt and all its plugins, including?rqt_graph.
rqt好像是默认装好的
To run rqt_graph, open a new terminal and enter the command:
rqt_graph其实这里就像ros1输入rqt也是可以的,rqt_graph是rqt的一部分

You can also open rqt_graph by opening?rqt?and selecting?Plugins?>?Introspection?>?Node Graph.
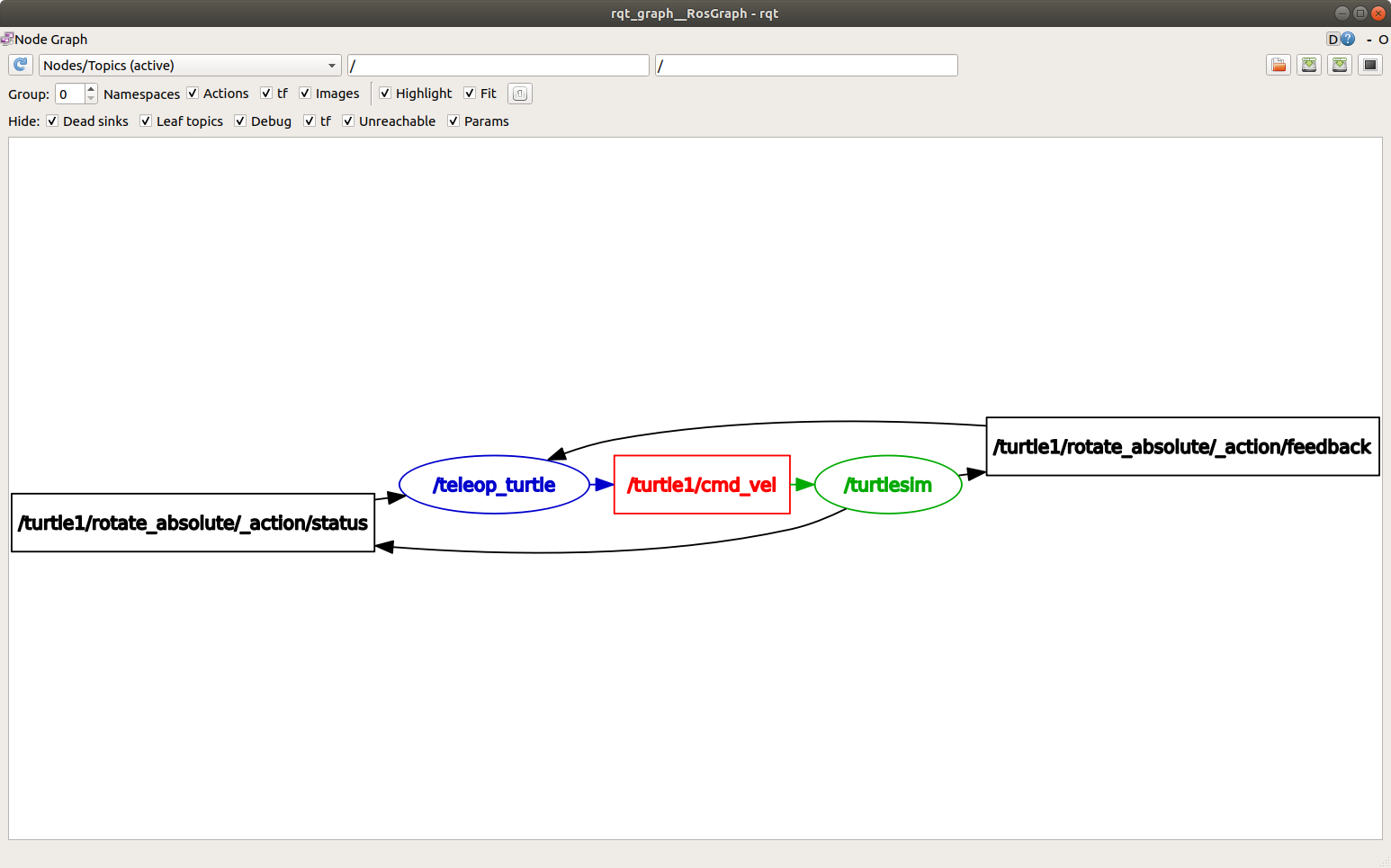
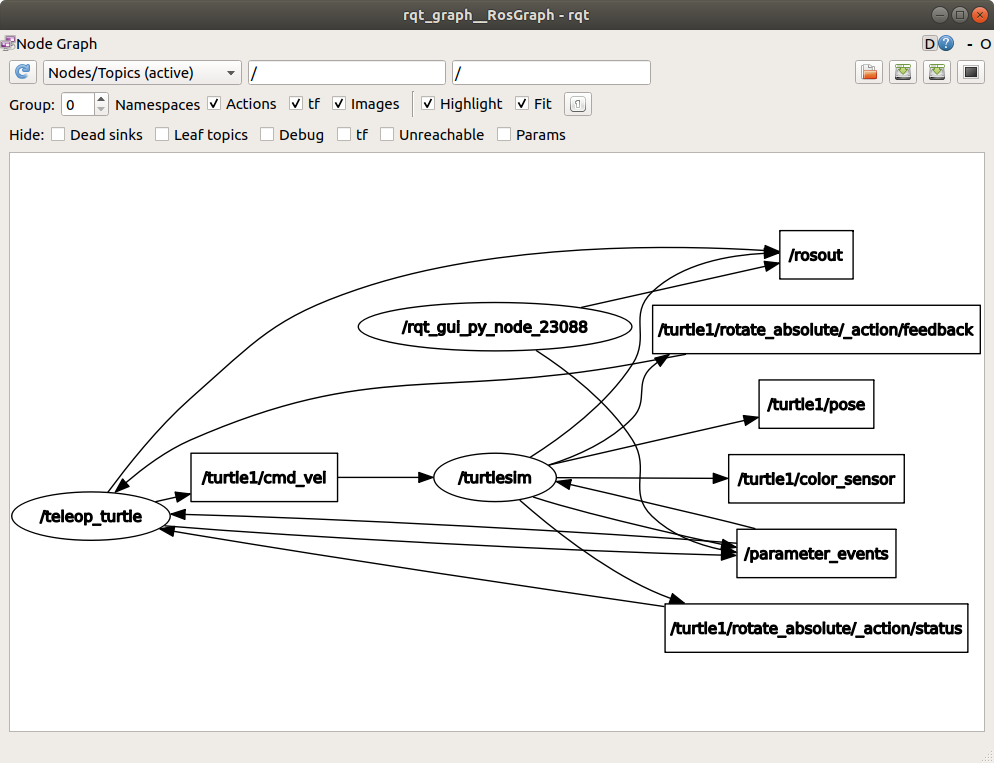
You should see the above nodes and topic, as well as two actions around the periphery of the graph (let’s ignore those for now). If you hover your mouse over the topic in the center, you’ll see the color highlighting like in the image above.
The graph is depicting how the?/turtlesim?node and the?/teleop_turtle?node are communicating with each other over a topic. The?/teleop_turtle?node is publishing data (the keystrokes you enter to move the turtle around) to the?/turtle1/cmd_vel?topic, and the?/turtlesim?node is subscribed to that topic to receive the data.
The highlighting feature of rqt_graph(你把鼠标放到节点上面就会出现颜色) is very helpful when examining more complex systems with many nodes and topics connected in many different ways.
rqt_graph is a graphical introspection tool. Now we’ll look at some command line tools for introspecting topics.
3 ros2 topic list?
Running the?ros2?topic?list?command in a new terminal will return a list of all the topics currently active in the system:
/parameter_events /rosout /turtle1/cmd_vel /turtle1/color_sensor /turtle1/pose

ros2?topic?list?-t?will return the same list of topics, this time with the topic type appended in brackets:括号里面的是话题类型
/parameter_events [rcl_interfaces/msg/ParameterEvent] /rosout [rcl_interfaces/msg/Log] /turtle1/cmd_vel [geometry_msgs/msg/Twist] /turtle1/color_sensor [turtlesim/msg/Color] /turtle1/pose [turtlesim/msg/Pose]

These attributes, particularly the type, are how nodes know they’re talking about the same information as it moves over topics.
If you’re wondering where all these topics are in rqt_graph, you can uncheck all the boxes under?Hide:
For now, though, leave those options checked to avoid confusion.
4 ros2 topic echo?
To see the data being published on a topic, use:
ros2 topic echo <topic_name>

Since we know that?/teleop_turtle?publishes data to?/turtlesim?over the?/turtle1/cmd_vel?topic, let’s use?echo?to introspect that topic:
ros2 topic echo /turtle1/cmd_vel
At first, this command won’t return any data. That’s because it’s waiting for?/teleop_turtle?to publish something.
Return to the terminal where?turtle_teleop_key?is running and use the arrows to move the turtle around. Watch the terminal where your?echo?is running at the same time, and you’ll see position data being published for every movement you make:
linear: x: 2.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.0 ---

Now return to rqt_graph and uncheck the?Debug?box.
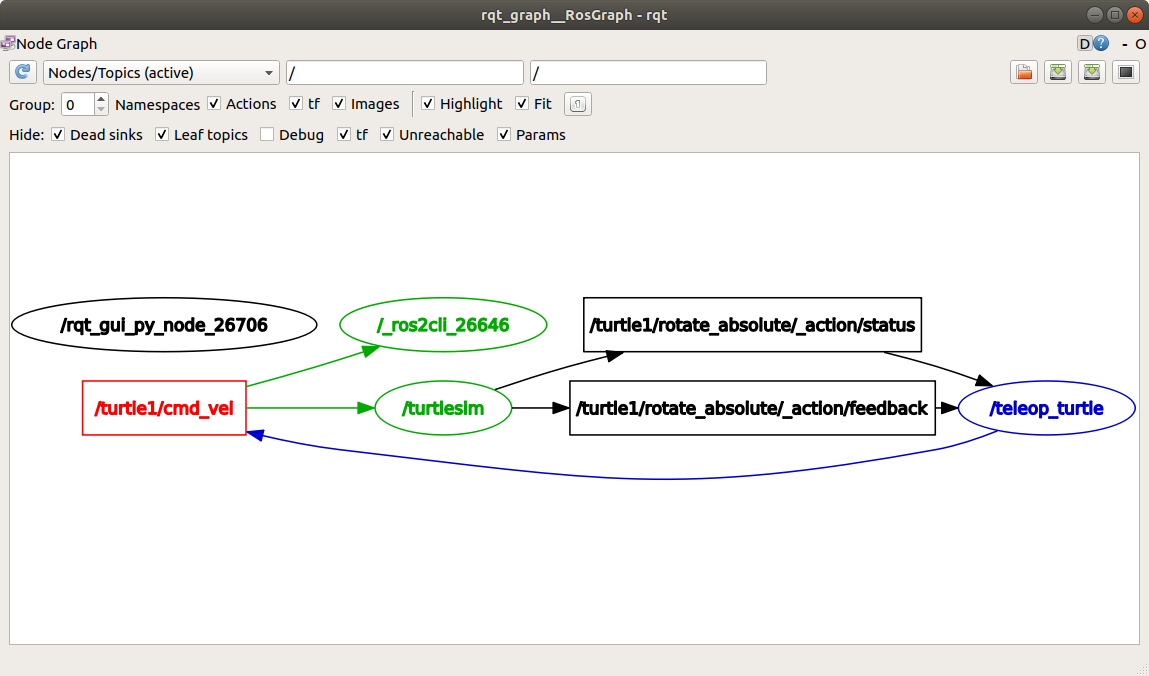
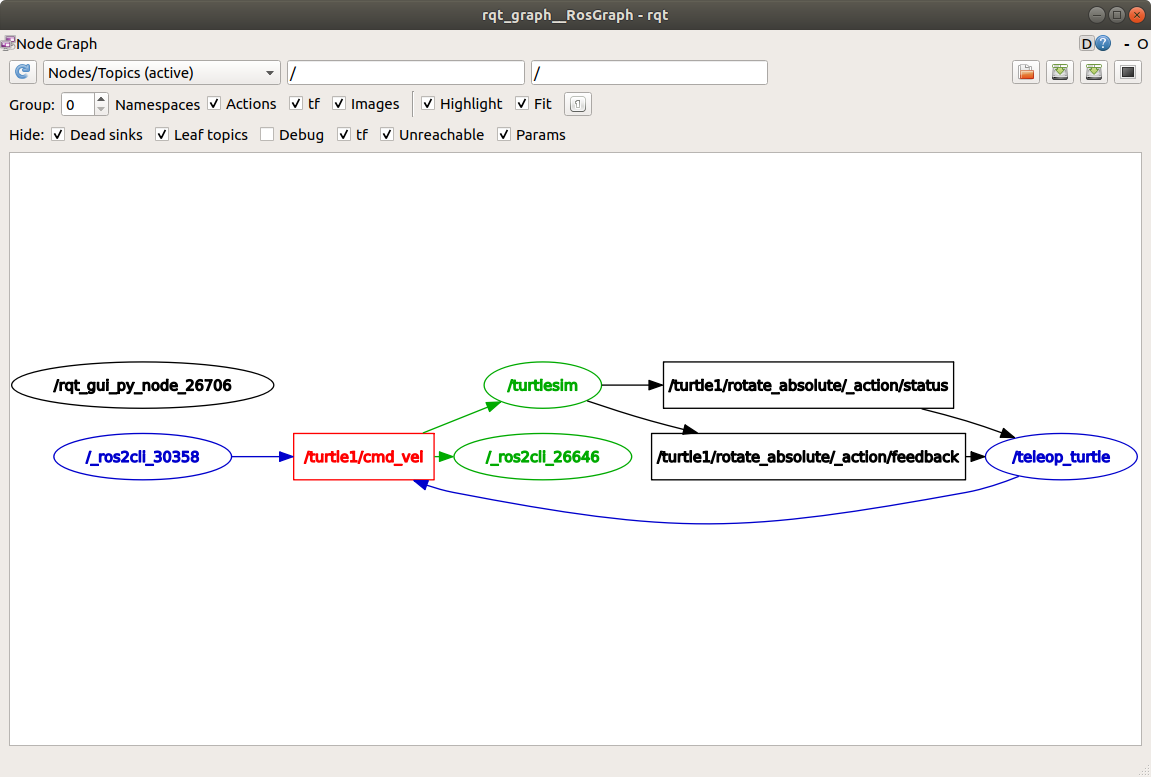
/_ros2cli_26646?is the node created by the?echo?command we just ran (the number might be different). Now you can see that the publisher is publishing data over the?cmd_vel?topic, and two subscribers are subscribed to it.
5 ros2 topic info?
Topics don’t have to only be one-to-one communication; they can be one-to-many, many-to-one, or many-to-many.
Another way to look at this is running:
ros2 topic info /turtle1/cmd_vel

Which will return:
Type: geometry_msgs/msg/Twist Publisher count: 1????????可以看到发布话题的节点的数量,一般都是1 Subscription count: 2可以看到订阅节点的数量
6 ros2 interface show?
Nodes send data over topics using messages. Publishers and subscribers must send and receive the same type of message to communicate.
The topic types we saw earlier after running?ros2?topic?list?-t?let us know what message type is used on each topic. Recall that the?cmd_vel?topic has the type:
geometry_msgs/msg/Twist

This means that in the package?geometry_msgs?there is a?msg?called?Twist.
Now we can run?ros2?interface?show?<msg?type>?on this type to learn its details. Specifically, what structure of data the message expects.
ros2 interface show geometry_msgs/msg/Twist

For the message type from above it yields:
# This expresses velocity in free space broken into its linear and angular parts.
Vector3 linear
float64 x
float64 y
float64 z
Vector3 angular
float64 x
float64 y
float64 z

This tells you that the?/turtlesim?node is expecting a message with two vectors,?linear?and?angular, of three elements each. If you recall the data we saw?/teleop_turtle?passing to?/turtlesim?with the?echo?command, it’s in the same structure:
linear: x: 2.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.0 ---

7 ros2 topic pub?
Now that you have the message structure, you can publish data to a topic directly from the command line using:
ros2 topic pub <topic_name> <msg_type> '<args>'

The?'<args>'?argument is the actual data you’ll pass to the topic, in the structure you just discovered in the previous section.
It’s important to note that this argument needs to be input in YAML syntax. Input the full command like so:
ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
--once?is an optional argument meaning “publish one message then exit”.
You will see the following output in the terminal:
publisher: beginning loop publishing #1: geometry_msgs.msg.Twist(linear=geometry_msgs.msg.Vector3(x=2.0, y=0.0, z=0.0), angular=geometry_msgs.msg.Vector3(x=0.0, y=0.0, z=1.8))
And you will see your turtle move like so:
The turtle (and commonly the real robots which it is meant to emulate) require a steady stream of commands to operate continuously. So, to get the turtle to keep moving, you can run:
ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"

The difference here is the removal of the?--once?option and the addition of the?--rate?1?option, which tells?ros2?topic?pub?to publish the command in a steady stream at 1 Hz.
You can refresh rqt_graph to see what’s happening graphically. You will see that the?ros2?topic?pub?...?node (/_ros2cli_30358) is publishing over the?/turtle1/cmd_vel?topic, which is being received by both the?ros2?topic?echo?...?node (/_ros2cli_26646) and the?/turtlesim?node now.
Finally, you can run?echo?on the?pose?topic and recheck rqt_graph:
ros2 topic echo /turtle1/pose

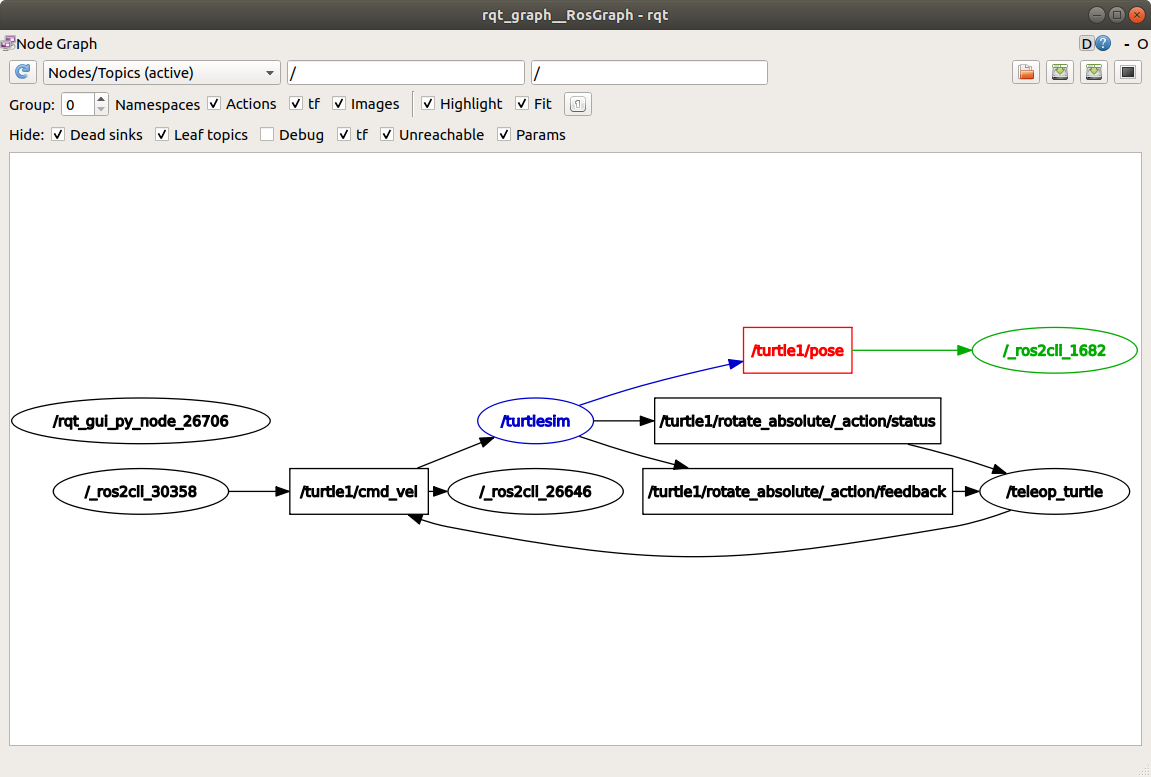
You can see that the?/turtlesim?node is also publishing to the?pose?topic, which the new?echo?node has subscribed to.
When publishing messages with timestamps,?pub?has two methods to automatically fill them out with the current time. For messages with a?std_msgs/msg/Header, the header field can be set to?auto?to fill out the?stamp?field.
ros2 topic pub /pose geometry_msgs/msg/PoseStamped '{header: "auto", pose: {position: {x: 1.0, y: 2.0, z: 3.0}}}'

If the message does not use a full header, but just has a field with type?builtin_interfaces/msg/Time, that can be set to the value?now.
ros2 topic pub /reference sensor_msgs/msg/TimeReference '{header: "auto", time_ref: "now", source: "dumy"}'
8 ros2 topic hz??使用这个查看话题发布的频率,例如50HZ就是每秒钟发布50次数?
For one last introspection on this process, you can view the rate at which data is published using:
ros2 topic hz /turtle1/pose
It will return data on the rate at which the?/turtlesim?node is publishing data to the?pose?topic.
average rate: 59.354 min: 0.005s max: 0.027s std dev: 0.00284s window: 58
Recall that you set the rate of?turtle1/cmd_vel?to publish at a steady 1 Hz using?ros2?topic?pub?--rate?1. If you run the above command with?turtle1/cmd_vel?instead of?turtle1/pose, you will see an average reflecting that rate.
9 Clean up?
At this point you’ll have a lot of nodes running. Don’t forget to stop them by entering?Ctrl+C?in each terminal.
Next steps?
Next you’ll learn about another communication type in the ROS graph with the tutorial?Understanding services.
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!