详细平稳解
1.详细平衡
定义:一个在高斯白噪声激励下的动力学系统在状态空间中如果用如下运动方程描述:
d d t X j \frac{d}{dt}\mathbf{X}_{j} dtd?Xj?= f j ( X ) f_{j}(\mathbf{X}) fj?(X)+ ∑ l = 1 m g j l ( X ) W l ( t ) \sum_{l=1}^{m}g_{jl}(\mathbf{X})W_{l}(t) ∑l=1m?gjl?(X)Wl?(t),j=1,2,…n
它一般不属于平稳势类。为满足FPK方程,可将一阶导数矩分成如下两个部分:
a j ( x ) = a j R ( x ) + a j I ( x ) a_{j}(\mathbf{x})=a_{j}^{R}(\mathbf{x})+a_{j}^{I}(\mathbf{x}) aj?(x)=ajR?(x)+ajI?(x)
其中, a j R ( x ) a_{j}^{R}(\mathbf{x}) ajR?(x)为可逆分量, a j I ( x ) a_{j}^{I}(\mathbf{x}) ajI?(x)为不可逆分量。不可逆部分和阻尼力相应,可逆部分与惯性力和恢复力相应 (对于拉格朗日提法和哈密顿提法也是如此)
补充:维纳过程和高斯白噪声之间的关系
考虑方程
d
X
(
t
)
d
t
=
W
(
t
)
,
X
(
0
)
=
0
\frac{dX(t)}{dt}=W(t),X(0)=0
dtdX(t)?=W(t),X(0)=0其中,
W
(
t
)
W(t)
W(t)是谱密度为
K
K
K的高斯白噪声,即
E
[
W
(
t
)
]
=
0
,
E
[
W
(
t
)
W
(
t
+
τ
)
]
=
2
π
K
δ
(
τ
)
.
E[W(t)]=0,E[W(t)W(t+\tau)]=2\pi K\delta(\tau).
E[W(t)]=0,E[W(t)W(t+τ)]=2πKδ(τ).
按维纳过程的定义,
X
(
t
)
X(t)
X(t)是维纳过程,则
d
B
(
t
)
d
t
=
W
(
t
)
.
(
?
)
\frac{dB(t)}{dt}=W(t).(*)
dtdB(t)?=W(t).(?)而维纳过程的强度
σ
2
\sigma^{2}
σ2与高斯白噪声的谱密度之间的关系为
σ
2
=
2
π
K
.
\sigma^{2}=2\pi K.
σ2=2πK.
这里的(*)式只是一种形式上的关系,因为维纳过程
B
(
t
)
B(t)
B(t)在
L
2
L_{2}
L2?意义上不可微。
作为最简单的马尔可夫扩散过程,维纳过程
B
(
t
)
B(t)
B(t)可以通过随机微分方程用于构造其他马尔可夫过程,一个标量马尔可夫扩散过程可由下式产生:
d
X
(
t
)
=
m
(
X
,
t
)
d
t
+
σ
(
X
,
t
)
d
B
(
t
)
dX(t)=m(X,t)dt+\sigma(X,t)dB(t)
dX(t)=m(X,t)dt+σ(X,t)dB(t),其中
B
(
t
)
B(t)
B(t)是单位维纳过程,即
E
[
B
(
t
1
)
B
(
t
2
)
]
=
m
i
n
(
t
1
,
t
2
)
,
E
[
d
B
(
t
1
)
d
B
(
t
2
)
]
=
{
0
,
t
1
≠
t
2
d
t
,
t
1
=
t
2
=
t
E[B(t_{1})B(t_{2})]=min(t_{1},t_{2}),E[dB(t_{1})dB(t_{2})]=\left\{\begin{matrix} 0, &t_{1}\neq t_{2} \\ dt, &t_{1}=t_{2}=t \end{matrix}\right.
E[B(t1?)B(t2?)]=min(t1?,t2?),E[dB(t1?)dB(t2?)]={0,dt,?t1?=t2?t1?=t2?=t?
2.以下举例说明:
2.1外激单自由度系统
考虑系统 X ¨ + h ( Λ ) X ˙ + u ( X ) = W ( t ) \mathbf{\ddot{X} }+h(\Lambda)\mathbf{\dot{X}}+u(\mathbf{X})=W(t) X¨+h(Λ)X˙+u(X)=W(t),式中 u ( X ) u(\mathbf{X}) u(X)是恢复力, W ( t ) W(t) W(t)是谱密度为 K K K的高斯白噪声, Λ \Lambda Λ是系统的总能量,也就是 Λ = 1 2 X ˙ 2 + ∫ 0 X u ( z ) d z . \Lambda=\frac{1}{2}\mathbf{\dot{X}}^{2}+ \int_{0}^{X}u(z)dz. Λ=21?X˙2+∫0X?u(z)dz.
自然地,我们可以知道阻尼力为 X ˙ \mathbf{\dot{X}} X˙对应部分,惯性力和恢复力为 u ( X ) u(\mathbf{X}) u(X)。
首先,我们得到系统对应的伊藤方程(令
X
1
=
X
\mathbf{X_{1}}=\mathbf{X}
X1?=X,
X
2
=
X
˙
\mathbf{X_{2}}=\mathbf{\dot{X}}
X2?=X˙):
d
X
1
=
X
2
d
t
d
X
2
=
?
[
h
(
Λ
)
X
2
+
u
(
X
1
)
]
d
t
+
2
π
K
d
B
(
t
)
.
d\mathbf{X_{1}}=\mathbf{X_{2}}dt\\ d\mathbf{X_{2}}=-[h(\Lambda)\mathbf{X_{2}}+u(\mathbf{X_{1}})]dt+\sqrt{2\pi K}dB(t).
dX1?=X2?dtdX2?=?[h(Λ)X2?+u(X1?)]dt+2πK?dB(t).
对于这里
d
B
(
t
)
=
W
(
t
)
d
t
dB(t)=W(t)dt
dB(t)=W(t)dt,由于把普通随机微分方程转化成了伊藤随机微分方程,故按对于的规则,得到上式;
σ
(
X
,
t
)
d
B
(
t
)
=
2
π
K
d
B
(
t
)
\sigma(X,t)dB(t)=\sqrt{2\pi K}dB(t)
σ(X,t)dB(t)=2πK?dB(t).
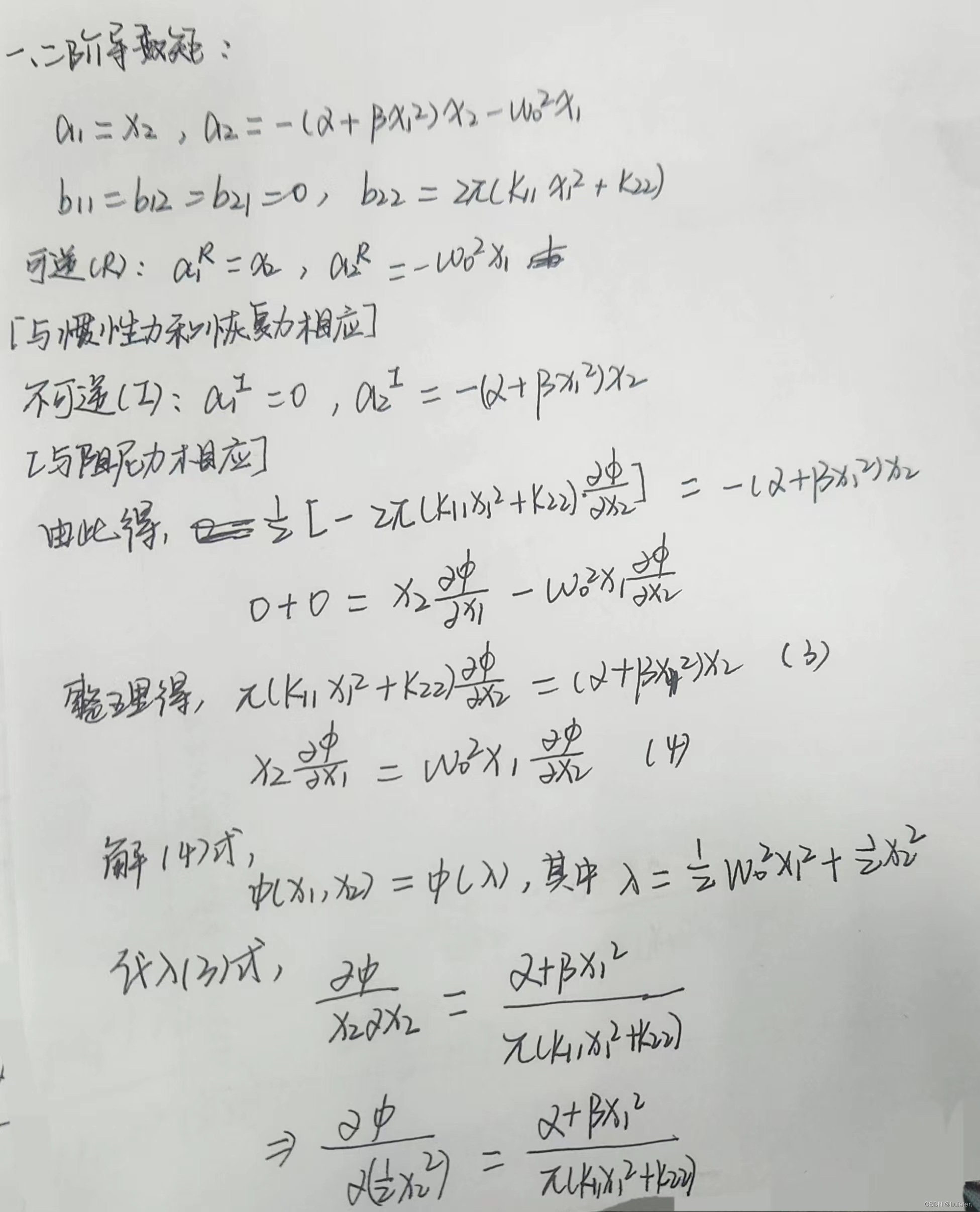
由此得到一、二阶导数矩:
a
1
=
x
2
,
a
2
=
?
h
(
λ
)
x
2
?
u
(
x
1
)
,
b
11
=
b
12
=
b
21
=
0
,
b
22
=
2
π
K
a_{1}=x_{2},a_{2}=-h(\lambda)x_{2}-u(x_{1}),b_{11}=b_{12}=b_{21}=0,b_{22}=2\pi K
a1?=x2?,a2?=?h(λ)x2??u(x1?),b11?=b12?=b21?=0,b22?=2πK
其中可逆部分:
a
1
R
=
x
2
,
a
2
R
=
?
u
(
x
1
)
a_{1}^{R}=x_{2},a_{2}^{R}=-u(x_{1})
a1R?=x2?,a2R?=?u(x1?)
不可逆部分:
a
1
I
=
0
,
a
2
I
=
?
h
(
λ
)
x
2
a_{1}^{I}=0,a_{2}^{I}=-h(\lambda)x_{2}
a1I?=0,a2I?=?h(λ)x2?
将上式带入
a
j
I
=
1
2
∑
k
=
1
n
[
?
?
x
k
b
j
k
(
x
)
?
b
j
k
(
x
)
?
?
?
x
k
]
,
∑
j
=
1
n
?
?
x
j
a
j
R
(
x
)
=
∑
j
=
1
n
a
j
R
(
x
)
?
?
?
x
j
.
a_{j}^{I}=\frac{1}{2}\sum_{k=1}^{n}[\frac{\partial }{\partial x_{k}}b_{jk}(x)-b_{jk}(x)\frac{\partial \phi}{\partial x_{k}}],\\ \sum_{j=1}^{n}\frac{\partial }{\partial x_{j}}a_{j}^{R}(x)=\sum_{j=1}^{n}a_{j}^{R}(x)\frac{\partial \phi}{\partial x_{j}}.
ajI?=21?k=1∑n?[?xk???bjk?(x)?bjk?(x)?xk????],j=1∑n??xj???ajR?(x)=j=1∑n?ajR?(x)?xj????.
(若系统属于详细平衡类,则存在一个
?
(
x
)
\phi(x)
?(x)满足所有这些方程。)
得到,
π
K
?
?
?
x
2
=
?
h
(
λ
)
x
2
,
(
1
)
x
2
?
?
?
x
1
=
u
(
x
1
)
?
?
?
x
2
.
(
2
)
\pi K \frac{\partial\phi}{\partial x_{2}}=-h(\lambda)x_{2},(1)\\ x_{2}\frac{\partial\phi}{\partial x_{1}}=u(x_{1})\frac{\partial \phi}{\partial x_{2}}.(2)
πK?x2????=?h(λ)x2?,(1)x2??x1????=u(x1?)?x2????.(2)
解(1)式:
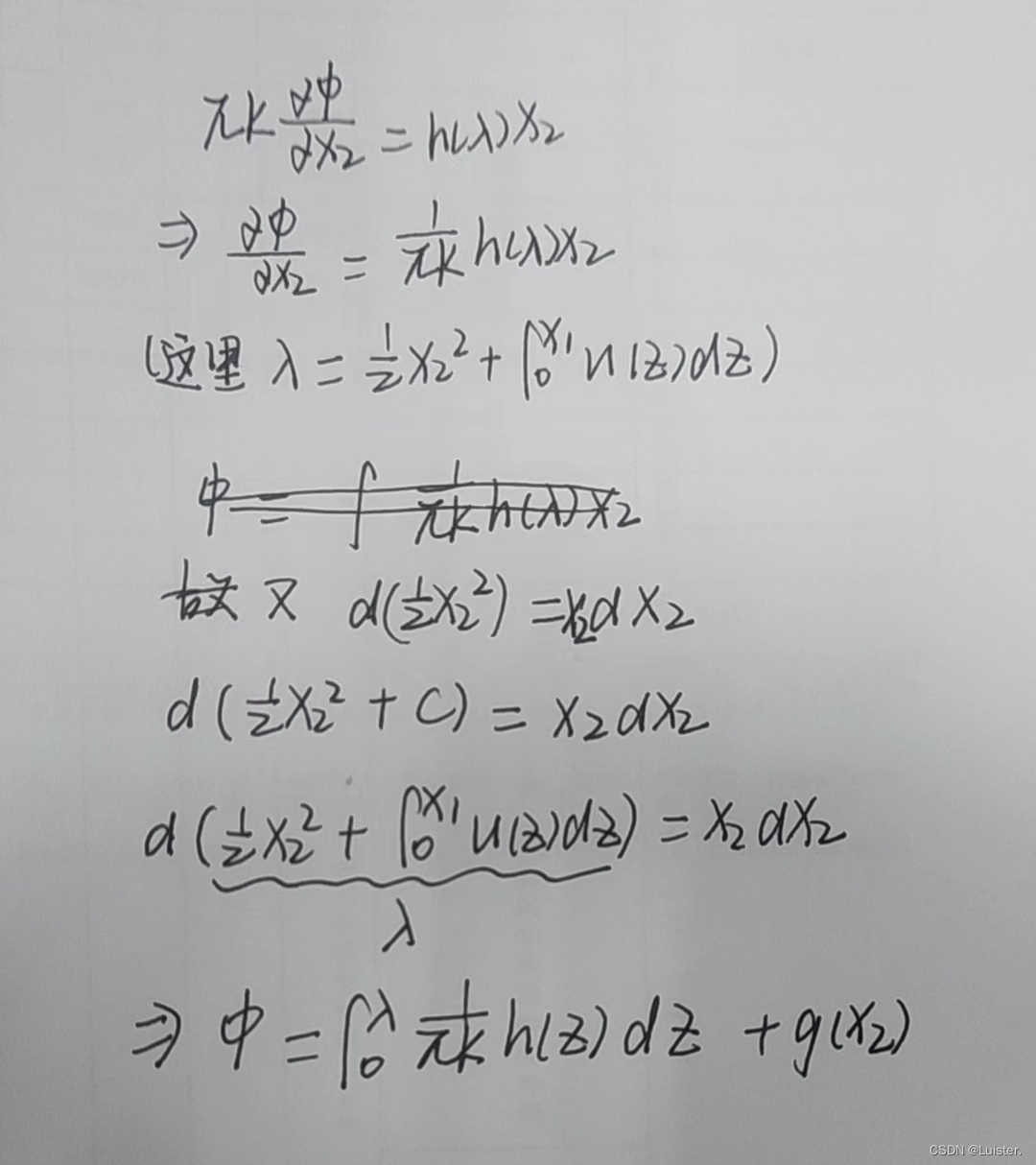
带入(2)式,发现
g
(
x
1
)
g(x_{1})
g(x1?)必为常数,又对于一个系统属于平稳势类则其平稳概率密度表示为:
p
(
x
)
=
C
e
x
p
[
?
?
(
x
)
]
p(x)=Cexp[-\phi(x)]
p(x)=Cexp[??(x)]其中,C为归一化常数,于是
p
(
x
1
,
x
2
)
=
C
e
x
p
[
?
1
π
K
∫
0
λ
h
(
z
)
d
z
]
,
λ
=
1
2
x
2
2
+
∫
0
x
1
u
(
z
)
d
z
.
p(x_{1},x_{2})=Cexp[-\frac{1}{\pi K}\int_{0}^{\lambda} h(z)dz],\lambda=\frac{1}{2}x_{2}^{2}+\int_{0}^{x_{1}}u(z)dz.
p(x1?,x2?)=Cexp[?πK1?∫0λ?h(z)dz],λ=21?x22?+∫0x1??u(z)dz.
故对于受外激作用的单自由度系统属于详细平衡类.
特别地,对于线性阻尼力情形:
h
(
Λ
)
X
˙
=
α
X
˙
h(\Lambda)\dot{X}=\alpha \dot{X}
h(Λ)X˙=αX˙,
p
(
x
1
,
x
2
)
=
C
e
x
p
{
?
α
π
K
[
∫
0
x
1
u
(
z
)
d
z
+
1
2
x
2
2
]
}
.
p(x_{1},x_{2})=Cexp\{-\frac{\alpha}{\pi K}[\int_{0}^{x_{1}}u(z)dz+\frac{1}{2}x_{2}^{2}]\}.
p(x1?,x2?)=Cexp{?πKα?[∫0x1??u(z)dz+21?x22?]}.
2.2同受外激和参激的单自由度系统
补充:外激(施加在系统上的外力或外部扰动);参激(系统内部的反馈信号或参数输入)。
X ¨ + ( α + β X 2 ) X ˙ + ω 0 2 X = X W 1 ( t ) + W 2 ( t ) \ddot{X}+(\alpha+\beta X^{2})\dot{X}+\omega_{0}^{2}X=XW_{1}(t)+W_{2}(t) X¨+(α+βX2)X˙+ω02?X=XW1?(t)+W2?(t)
其中 W 1 ( t ) W_{1}(t) W1?(t)与 W 2 ( t ) W_{2}(t) W2?(t)是谱密度分别为 K 11 K_{11} K11?与 K 22 K_{22} K22?的独立高斯白噪声,以 X 1 X_{1} X1?记 X X X, X 2 X_{2} X2?记 X ˙ \dot{X} X˙,则对于的伊藤方程:
d X 1 = X 2 d t d X 2 = ? [ ( α + β X 1 2 ) X 2 + ω 0 2 X 1 ] d t + 2 π ( K 11 X 1 2 + K 22 ) d B ( t ) dX_{1}=X_{2}dt\\ dX_{2}=-[(\alpha+\beta X_{1}^{2})X_{2}+\omega_{0}^{2}X_{1}]dt+\sqrt{2 \pi (K_{11}X_{1}^{2}+K_{22})}dB(t) dX1?=X2?dtdX2?=?[(α+βX12?)X2?+ω02?X1?]dt+2π(K11?X12?+K22?)?dB(t)
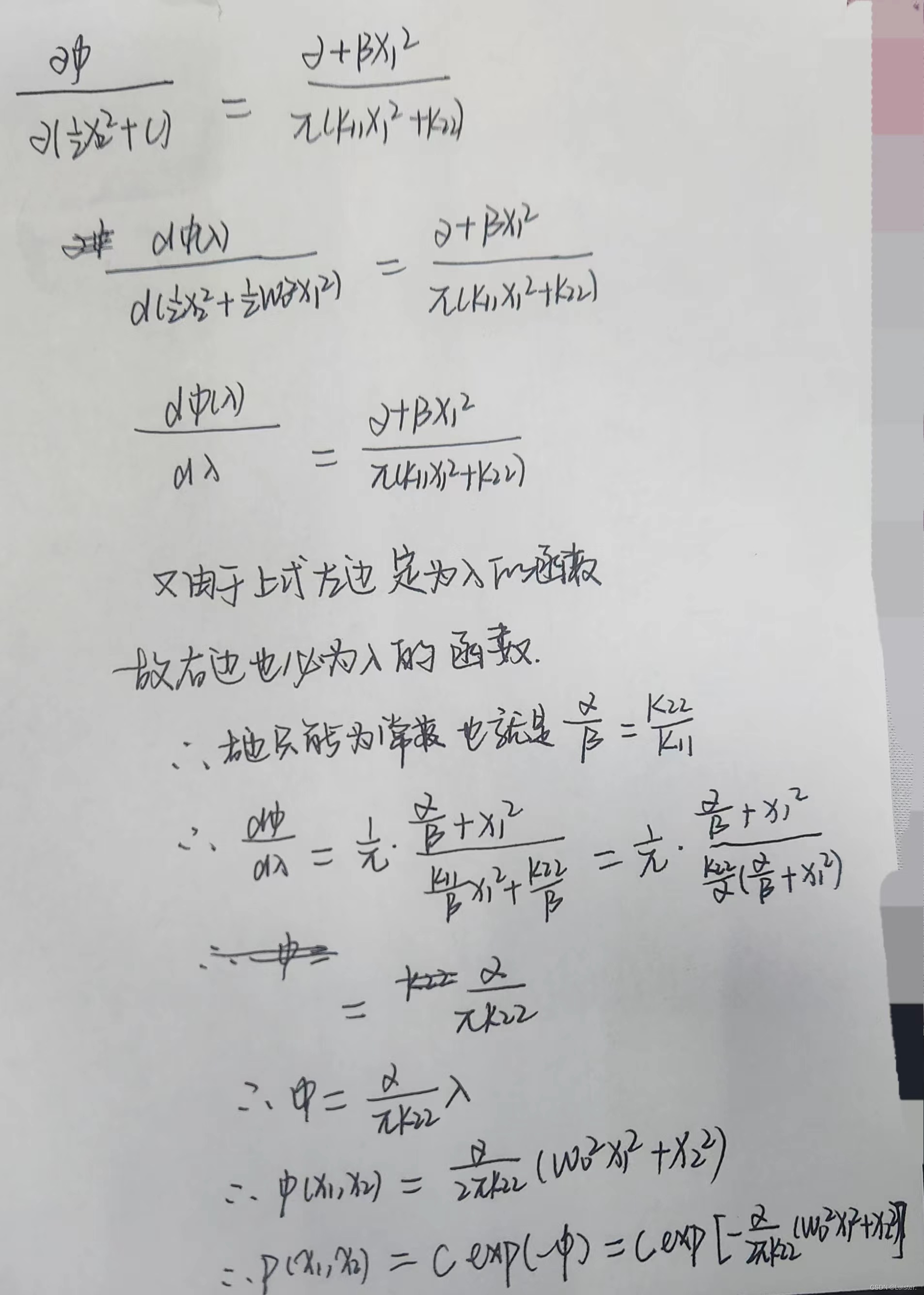
可以看到这里系统属于详细平衡解需要满足 α β = K 22 K 11 \frac{\alpha}{\beta}=\frac{K_{22}}{K_{11}} βα?=K11?K22??。
ps:可能会补充更新,仅供自己学习使用,对于其他形式的系统可作类似推导,都是书中原例。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!