易用、高效、可靠!高精度组合定位系统P-Box测试解决方案
简介
TCU(Telematics Control Unit)是车载网联通讯终端,用于实现车辆远程通讯和远程服务。随着自动驾驶技术的不断发展,准确获取车辆定位信息变得越来越重要。P-Box将GNSS定位与惯性导航定位相结合,能够为车辆提供精准的绝对位置信息和车身姿态信息,确保位置信息的稳定性和可靠性,在自动驾驶的发展中扮演着重要的角色之一。
德思特GNSS模拟器满足了融合定位单元P-Box的测试需求,为汽车V2X和辅助驾驶应用中的高精度融合定位性能测试和评价提供了更加丰富的测试场景。

惯性导航定位
自动驾驶系统中,车辆可以通过多类型传感器去获取周边环境与车身信息,并依托该信息进行处理与规划,最终做出实时决策。而其中:GNSS定位是唯一可以提供“绝对位置”的传感器,因此GNSS定位终端至关重要。
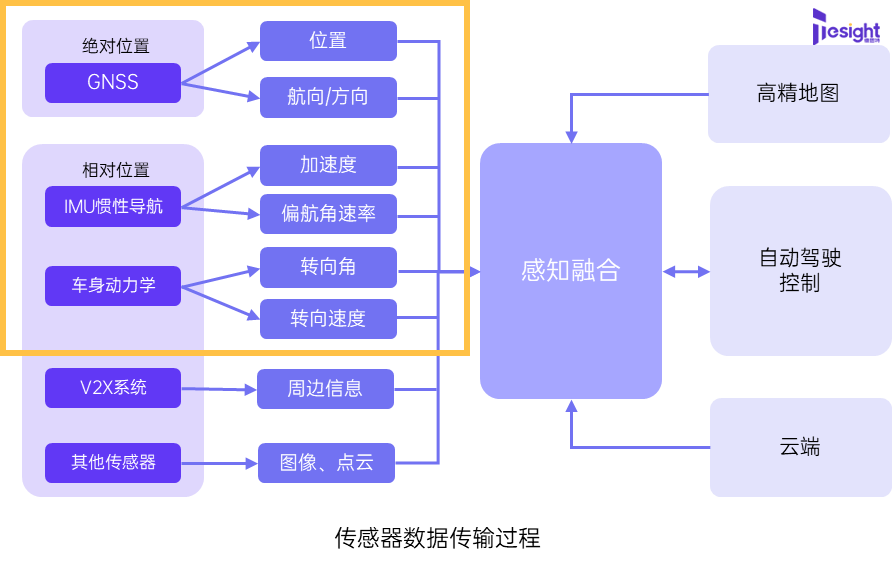
但是GNSS信号功率较小,易收到环境与外界因素的影响,无法保证100%的可靠性,因此还需要其他可以提供相对位置与校正信息的传感器协助。惯性导航系统(Inertial Measurement Unit,IMU)通过测量和集成加速度计和陀螺仪的数据来估计和跟踪运动的位置、速度和方向。
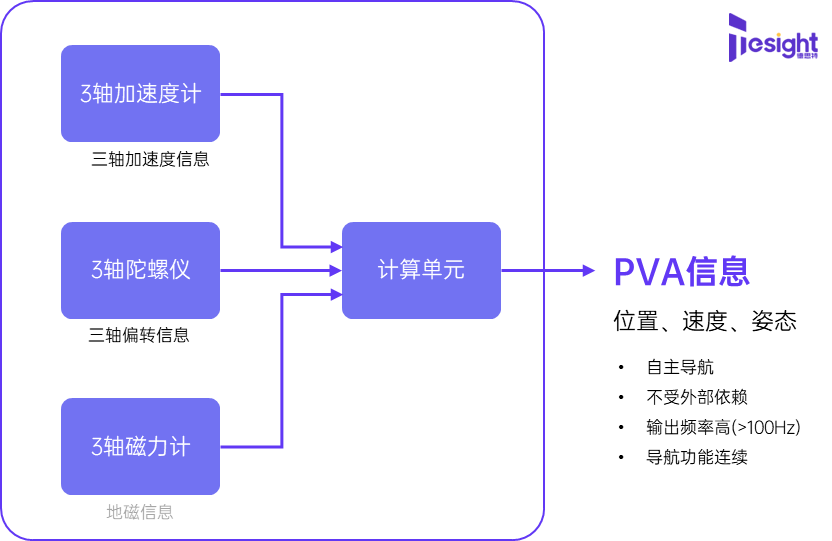
惯性导航系统不依赖于外部参考点或信号,具有独立性和实时性的优势,输出频率高,导航功能确保连续与可靠。惯性导航在许多领域中都有广泛应用,包括航空航天、船舶、无人驾驶和导航系统补充等,为了提高精度和稳定性,惯性导航系统通常与其他定位技术(如GNSS、视觉或激光雷达)结合使用,进行数据融合或传感器融合。
P-Box集成了GNSS定位导航与IMU导航,能够为车辆提供基于INS的定位导航方法,用于提供精确的车辆位置和姿态信息。通过融合GNSS和惯性导航数据,P-Box能够提供更稳定和可靠的位置信息,不受天气条件或信号遮挡的影响。它不仅可以提供准确的绝对位置信息,还能提供车辆的姿态信息(如车身倾斜角度、转向角等)。车辆P-Box在自动驾驶和车联网领域具有重要意义。它为自动驾驶车辆提供必要的定位和导航信息,支持车辆的精确控制和路径规划。同时,在车联网应用中,P-Box可以实现车辆远程通讯、车辆追踪与监控等功能,为车辆安全和智能化提供支持。目前国内外有大量知名公司都在从事这方面产品开发。
德思特P-BOX测试解决方案
德思特P-BOX测试解决方案旨在为用户提供易用、可靠、高效的测试方式,并确保对未来的发展与变化具备灵活性。
德思特P-BOX测试解决方案是基于德思特Safran GNSS模拟器实现的,在提供真实全景的GNSS信号同时,在同一个系统内为用户提供同步、准确的三轴加速度、方向角信息,用于对后端IMU测试平台/融合算法的控制与测试。此外,同步提供RTK测试能力,无需额外的设置与调整,在原有基础上即可进行RTCM消息的验证

1.GNSS模拟与仿真功能全面强大
德思特Safran GNSS模拟器是基于软件定义架构的新一代GNSS模拟器,为用户提供最具价值与未来的模拟方案:
●?信号质量与精度高:伪距精度为0.001 m,伪距率为0.001 m/s
●?满足各类测试场景信号需求:输出功率范围为-170~-30 dBm
●?500-1000颗卫星搜星通道免费开放给用户
●100%支持现有民用卫星星座:BEIDOU\GPS\GALILEO\GLONASS\QZSS\NAVIC
●?仿真迭代率1000?Hz,支持高速、高精、流畅的GNSS仿真
●?HIL仿真延迟:5 ms,具备实时闭环仿真能力
●?开放的API与自定义功能,支持API外部控制与Plugin导入,允许自定义信号导入
●?现代化UI高度人机效能
●?支持多实例仿真,一台设备变多台
●?内置诊断和故障排除工具
●?......

2.同步提供IMU惯性组合导航测试能力
德思特Safran GNSS模拟器在提供GNSS仿真的同时,支持IMU数据的实时生成。
无需外部设备或软件,在Skydel GNSS模拟器内一键完成配置,实时进行位置与轨迹生成与惯导数据转换,并支持以1000 Hz速率输出三轴加速度信息与三轴方向角信息,并可选的进行误差添加,实现对于IMU算法的快速验证或通过硬件平台验证IMU单元性能。

3.多种RTK测试方法
德思特Safran GNSS模拟器在GNSS模拟的基础上,支持RTK仿真,为车辆提供高精度融合定位性能测试和评价能力。Skydel GNSS模拟器引擎创新性的多实例(MULTI)功能为RTK测试带来了新的可能性。
▲什么是多实例(MULTI)功能?
多实例功能从本质来讲就是把一台设备变成多台,一个软件变成多个,他们之间是完全独立的,可以任意配置,为用户提供同步独立测试两个接收端、两辆车,两个天线的能力。Skydel提供的是一个同步过的平台,以及可能需要的配置同步功能。
允许用户在一台设备内同时配置基准站与流动站,并进行RTK测试。其中:GSG-7使用RTCM插件功能为流动站注入虚拟的RTCM(串口、以太网),待测件通过RTK计算获得精准定位;GSG-8使用两个独立实例分别仿真基准站与流动站,并通过基准站接收机实时产生差分校正数据给到待测件,从而通过RTK计算获得精准定位。
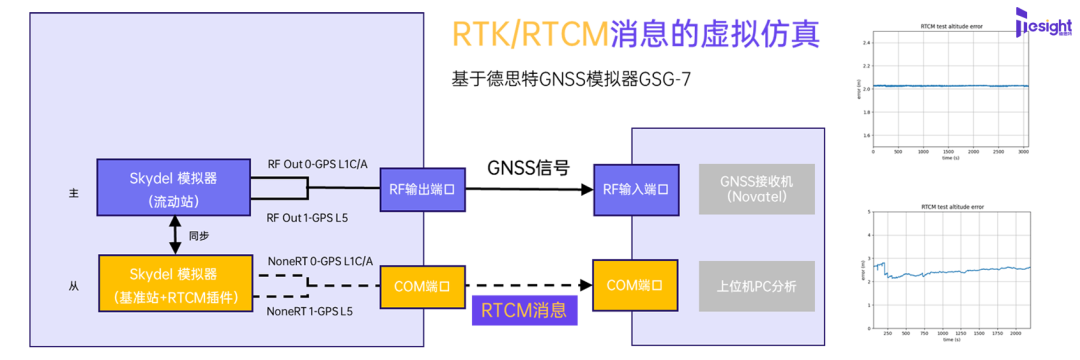
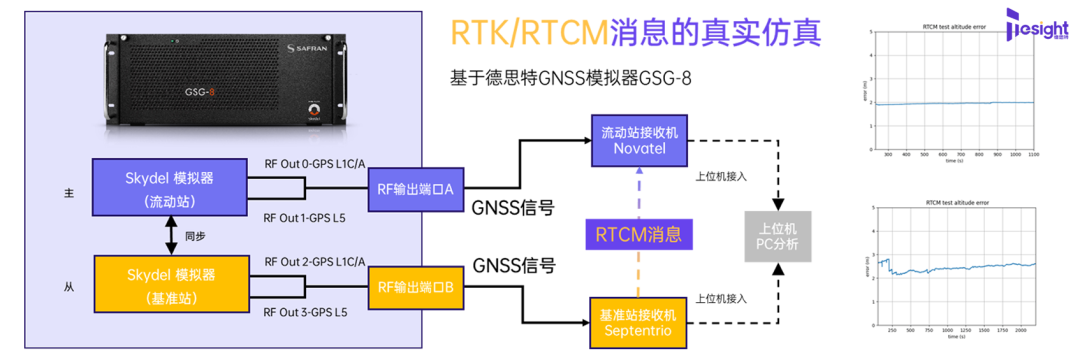
两种不同的方法来模拟RTCM的使用,一种是基于RTCM插件,插件方法对没有基准站接收机而想模拟RTCM校正的用户有帮助,该方法更接近于现实中使用RTK的方法;另一种是基于多实例,模拟两个同步的射频信号,适用于那些希望将基准站接收器纳入测试循环,对基准站与RTCM消息进行研究测试的用户。
4.真实场景还原能力
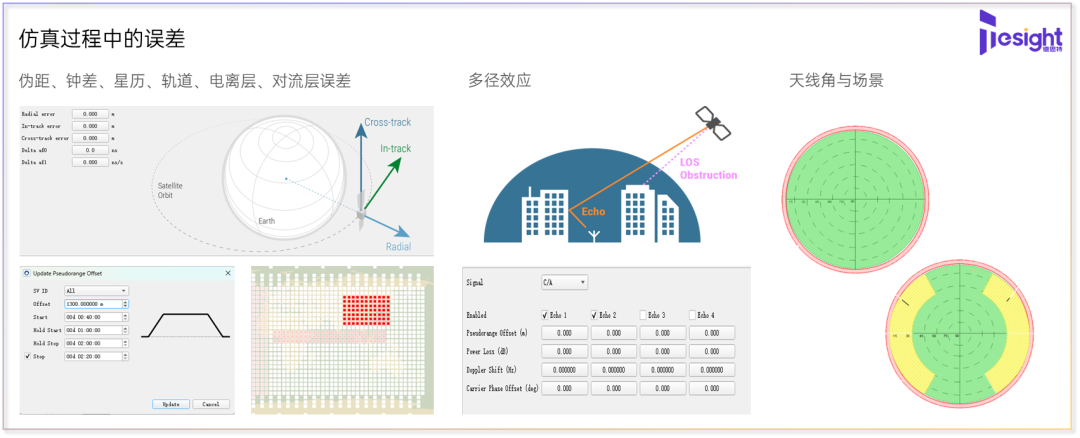
德思特Safran GNSS模拟器力求还原真实的测试场景,为用户带来较好的仿真体验与效果,并本着人性化与现代化的发展方向将卫星仿真、误差添加、运动形态等全部装进一个软件。在Skydel软件的内部即可进行场景的构建与调整。
德思特Safran GNSS模拟器旨在提供真实的测试场景,以提供用户更好的仿真体验和效果。在设计上注重人性化和现代化的发展方向,将卫星仿真、误差添加、运动形态等功能融合在一个软件中,用户可以在Skydel软件的内部进行场景构建和调整。尽可能还原真实的测试环境,以使用户能够进行真实世界下的仿真和测试,模拟卫星信号的行为,包括信号强度、多径效应、信号干扰等。此外,用户还可以通过添加误差模拟真实场景中可能出现的各种因素,如大气延迟、钟差、星历误差等。
5.助力待测终端各层级开环/闭环仿真测试
德思特P-BOX测试解决方案基于GNSS模拟器实现,德思特GNSS模拟器同步提供GNSS信号与IMU信号的同时还简化了测试系统的构成与实现难度:
●?德思特GNSS模拟器是软件定义架构,因此本身就是一台高性能计算机,允许将测试系统与其他软件安装在同一个Linux?Ubuntu平台下,可靠稳定的同时降低了后期调试与连接的难度
●?德思特GNSS模拟器内置一张高性能的时间同步板卡,可以产生1 PPS+10 MHz的时间同步信号给其他设施,用于精准的时间同步与对齐,无需额外添加原子钟与同步设施。
此外,软件定义架构的开放性允许与其他的软硬件快速联调,搭建专属于用户的测试方案,利用场景软件实时生成场景与位置信息,并借助GNSS模拟器与其他设备进行仿真闭环,最短的时间完成对于待测件的HIL/DIL验证。

德思特P-BOX测试解决方案
测试示例与优势
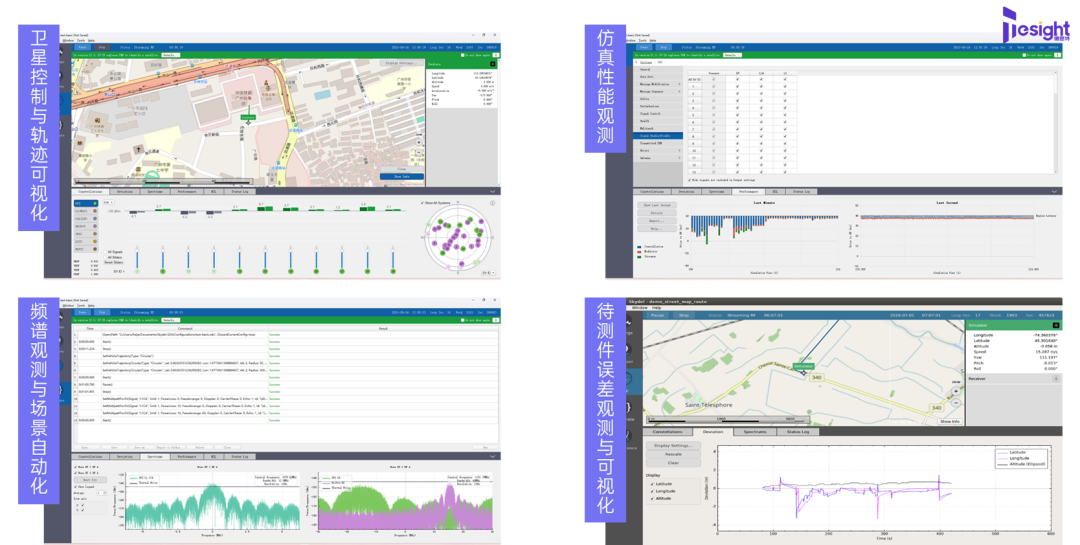
在唯一的上位机软件Skydel上可以完成一些列的场景配置、信号生成、实时调整与自动化等,无需额外的软件或硬件,简单易懂且直观高效:
德思特Safran GNSS模拟器为汽车V2X和辅助驾驶应用中的高精度融合定位性能测试和评价提供了更加丰富的测试场景与平台:
●?支持全景全频段导航信号仿真
●?免费开放500-1000个搜星通道
●?更新迭代率高达1000 Hz
●?全面开放的API与互操作性
●?实时配置与修改能力
●?独立的GNSS模拟设备,无需额外配置
●?简洁、高效、开放、全面的GUI
●?最低-170 dBm输出功率
●?全球8000+设备在稳定运行
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!