Opencv实验合集——实验八:相机校准
1.定义
首先,我们来理解一下怎么从相机的角度去看一张图片,就好比如你用眼睛作为相机来进行摄影,但是比摄影机强的是,你是怎么摄影图片之后再将它矫正出现在你眼前,将歪歪扭扭的图片变成一张在你眼前是一张直的图片

为了轻松理解问题,假设您在房间中部署了一个摄像头。
给定这个房间中的一个 3D 点?P,我们希望在相机拍摄的图像中找到这个 3D 点的像素坐标 (u, v),即你眼前对应的二位平面的坐标
现在我们一步步进行推理变换
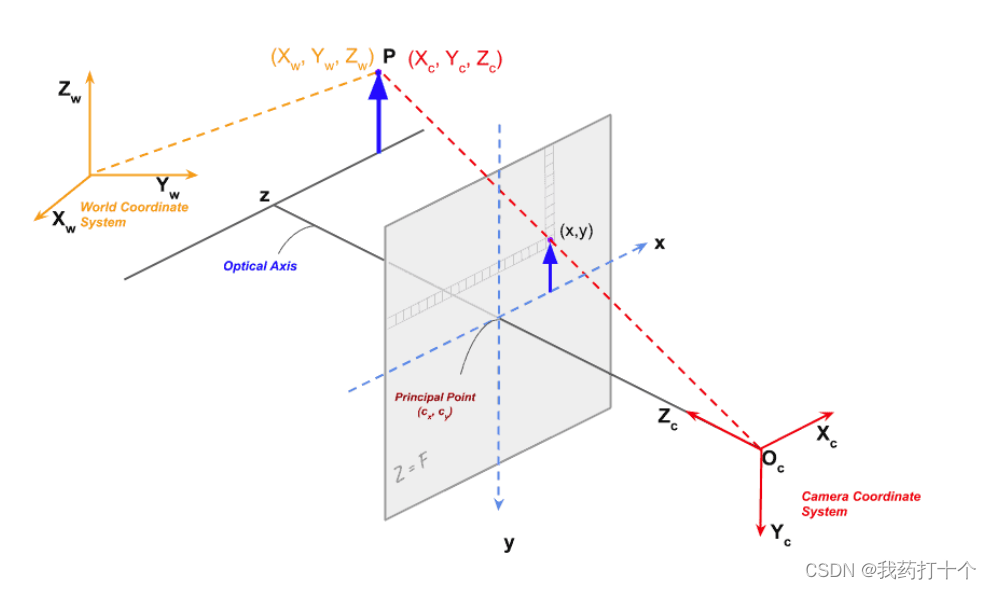
?1.世界坐标系

要定义房间中点的位置,我们需要首先为这个房间定义一个坐标系。它需要两件事
- 原点:我们可以任意固定房间的一角作为原点(0,0,0)。
- X、Y、Z轴 :我们还可以沿地板上的二维定义房间的X轴和Y轴,沿垂直墙定义Z轴。
使用上述方法,我们可以通过沿 X、Y 和 Z 轴测量它与原点的距离来找到该房间中任何点的 3D 坐标(Xw,Yw,Zw)。
此坐标系附加到房间称为世界坐标系。在图 1 中,它使用橙色轴显示。我们将使用粗体字体(例如?(Xw,Yw,Zw)?)来显示轴,并使用常规字体来显示点的坐标(例如(Xw,Yw,Zw))。
通俗来讲就是以上帝视角从一个角落出发,抛开相机,定义一个物体的坐标?(Xw,Yw,Zw)
2.相机坐标系
现在,让我们在这个房间里放一个摄像头。
房间的图像将使用此相机捕获,因此,我们对连接到该相机的 3D 坐标系感兴趣。
如果我们将相机放在房间的原点,并对其进行对齐,使其 X、Y 和 Z 轴与房间的Xw,Yw和Zw轴对齐,则两个坐标系将相同。
然而,这是一个荒谬的限制。我们希望将相机放在房间的任何地方,它应该能够看到任何地方。在这种情况下,我们需要找到 3D 房间(即世界)坐标和 3D 相机坐标之间的关系。
假设我们的相机位于房间的任意位置
用技术术语来说,我们可以将相机坐标相对于世界坐标进行平移
相机也可能在看某个任意方向。换句话说,我们可以说相机是相对于世界坐标系旋转的。
3D 旋转是使用三个参数捕获的 -- 您可以将这三个参数视为偏航、俯仰和滚动。你也可以把它看作是3D轴(两个参数)和围绕该轴的角度旋转(一个参数)。
但是,将旋转编码为 3×3 矩阵通常很方便。现在,您可能会认为 3×3 矩阵有 9 个元素,因此有 9 个参数,但旋转只有 3 个参数。这是真的,这就是为什么任何任意的 3×3 矩阵都不是旋转矩阵的原因。在不赘述细节的情况下,现在让我们只知道旋转矩阵只有三个自由度,即使它有 9 个元素。
世界坐标和相机坐标通过旋转矩阵R和 3 元素平移向量相关联平移向量t(t_X、t_Y、t_Z)
这意味着在世界坐标中具有坐标值
的点 P 在照相机坐标系中将具有不同的坐标值
我们使用红色表示相机坐标系。
这两个坐标值通过以下等式相关。
请注意,将旋转表示为矩阵允许我们使用简单的矩阵乘法进行旋转,而不是像偏航、俯仰、滚动等其他表示形式那样需要繁琐的符号操作。我希望这能帮助您理解为什么我们将旋转表示为矩阵。
通俗来说就是通过矩阵相乘,通过世界坐标(Xw,Yw,Zw)旋转加平移变成相机坐标系(Xc,Yc,Zc)



在射影几何中,使用齐次坐标来表示点,它在坐标上添加了一个额外的维度。
世界坐标在等式中使用齐次坐标,这允许在有限数内表示无限量,例如表示无穷远处的点?
将 3×1 平移向量作为列附加到 3×3 旋转矩阵的末尾,以获得称为外在矩阵的 3×4 矩阵。
(2)?
其中,外在矩阵P由下式给出
(3)?
齐次坐标 :在射影几何中,我们经常使用有趣的坐标表示,其中在坐标上附加了一个额外的维度。笛卡尔坐标中的 3D 点
可以写成
齐次坐标。更一般地说,齐次坐标中的点与笛卡尔坐标
中的点
相同。齐次坐标允许我们使用有限数来表示无限量。例如,无穷远处的点可以表示为
齐次坐标。您可能会注意到,我们在等式 2 中使用了齐次坐标来表示世界坐标。





3.图像坐标系
现在则需要将相机坐标系中的3D坐标投影成投影面的2D坐标
一旦我们通过对点世界坐标应用旋转和平移在相机的 3D 坐标系中得到一个点,我们就可以将该点投影到图像平面上以获得该点在图像中的位置。
在上图中,我们看到的是相机坐标系
中坐标为坐标的点 P。提醒一下,如果我们不知道这个点在相机坐标系中的坐标,我们可以使用外在矩阵变换它的世界坐标,从而使用公式获得相机坐标系中的坐标。
光学中心(针孔)用Oc表示。实际上,该点的倒置图像是在图像平面上形成的。为了数学上的方便,我们简单地进行所有计算,就好像图像平面在光学中心的前面一样,因为从传感器读出的图像可以微不足道地旋转 180 度以补偿反转。在实践中,即使这不是必需的。读者奥拉夫·彼得斯(Olaf Peters)在评论部分指出:“这甚至更简单:真正的相机传感器只是以相反的顺序(从右到左)从最底层的一行读出,然后从每一行从下到上读出。通过这种方法,图像自动直立形成,左右顺序正确。因此,在实践中,不再需要旋转图像。
将图像平面放置在距光学中心一定距离 f (焦距)处。使用高中几何图形(相似三角形),我们可以显示由下式给出的3D点
的投影图像(x,y)
上面两个方程可以用矩阵形式改写如下
下面K显示的矩阵称为内在矩阵,包含相机的内在参数。
上面的简单矩阵仅显示了焦距。


?
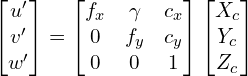
特殊情况:如果相机不是正方形的,则x方向和y方向的焦距不相等,
因此我们可能有两种不同的焦距?fx?和 fy?相机的光学中心?(Cx,Cy)?可能与图像坐标系的中心不重合
考虑到以上所有因素,相机矩阵可以重写为。
让我们用?(u,v)表示图像坐标。



总结
将世界坐标系中的 3D 点投影到相机像素坐标分两步完成。
- 使用外部矩阵将 3D 点从世界坐标转换为相机坐标,该矩阵由两个坐标系之间的旋转和平移组成。
- 相机坐标系中的新 3D 点使用内在矩阵投影到图像平面上,该矩阵由内部相机参数(如焦距、光学中心等)组成。
?
2.相关的函数方法
cv.findChessboardCorners是OpenCV库中用于在图像中检测棋盘格角点的函数。这个函数主要用于相机标定,其中通过检测棋盘格的角点,可以估计相机的内部参数(如焦距、主点坐标等)和外部参数(相机的姿态)ret, corners = cv.findChessboardCorners(image, patternSize, corners, flags)
image: 输入的图像,通常是灰度图像。patternSize: 棋盘格的尺寸,是一个二元组(columns, rows),表示棋盘格的列数和行数。corners: 用于存储检测到的角点的输出变量,通常是一个NumPy数组。flags: 用于指定额外的标志,例如角点的搜索精度等。返回值:
ret: 一个布尔值,表示是否成功找到了棋盘格的角点。如果找到了,ret为True;否则为False。corners: 一个包含检测到的角点坐标的NumPy数组。寻找角点的方法不仅仅限于
cv.findChessboardCorners。OpenCV 提供了多种寻找角点的方法,具体选择取决于场景和应用的需求。以下是一些常用的寻找角点的方法:
cv.findChessboardCorners:
- 适用于拍摄包含棋盘格的图像,尤其是用于相机标定的情况。
cv.findCirclesGrid:
- 用于在图像中寻找圆形的格子,通常用于相机标定。
cv.goodFeaturesToTrack:
- 基于角点响应的方法,用于在图像中检测最强的角点。
cv.cornerHarris:
- 使用Harris角点检测方法,在图像中找到角点。
cv.cornerMinEigenVal:
- 类似于
cv.goodFeaturesToTrack,也是一种角点检测方法。cv.cornerSubPix:
- 在已知的角点位置周围进行亚像素级别的角点精细调整。
cv.SimpleBlobDetector:
- 用于检测二值图像中的斑点或小的圆形物体,适用于一些计算机视觉应用。
cv.cornerSubPix是OpenCV库中的一个函数,用于对由cv.findChessboardCorners等角点检测函数找到的初始角点坐标进行亚像素级别的精细调整。该函数通常在进行相机标定时使用,以提高角点坐标的准确性cv.cornerSubPix(image, corners, winSize, zeroZone, criteria)
image: 输入的灰度图像。corners: 初始角点坐标,通常是通过角点检测函数(如cv.findChessboardCorners)得到的。winSize: 用于搜索最佳角点位置的窗口大小。zeroZone: 在搜索过程中忽略的中心区域。criteria: 迭代终止的条件。返回值:
- 调整后的角点坐标
?
cv.drawChessboardCorners是OpenCV库中的一个函数,用于在图像上绘制检测到的棋盘格角点。该函数通常与角点检测函数(如cv.findChessboardCorners)一起使用,以便在标定相机时可视化检测到的角点。cv.drawChessboardCorners(image, patternSize, corners, patternWasFound)
image: 输入的图像,通常是彩色图像。patternSize: 棋盘格的尺寸,是一个二元组(columns, rows),表示棋盘格的列数和行数。corners: 由角点检测函数(例如cv.findChessboardCorners)找到的角点坐标。patternWasFound: 一个布尔值,表示是否成功找到了棋盘格
?
cv.calibrateCamera是OpenCV中用于相机标定的函数。相机标定是确定相机内部参数和外部参数的过程,包括焦距、主点坐标、畸变系数以及相机的姿态等信息。标定是摄像机应用中重要的一步,可以用于纠正图像畸变、进行三维重建等应用。retval, cameraMatrix, distCoeffs, rvecs, tvecs = cv.calibrateCamera(objectPoints, imagePoints, imageSize, cameraMatrix, distCoeffs, rvecs, tvecs, flags)
objectPoints: 世界坐标系中的点的坐标,通常是一个包含三维点的列表。imagePoints: 对应于objectPoints的图像上的点的坐标,通常是一个包含二维点的列表。imageSize: 输入图像的尺寸,通常是一个包含图像宽度和高度的元组。cameraMatrix: 相机内部参数矩阵,输出标定过程中估计得到的相机内部参数。distCoeffs: 畸变系数,输出标定过程中估计得到的径向和切向畸变参数。rvecs: 旋转向量的数组,输出相机外部参数中的旋转向量。tvecs: 平移向量的数组,输出相机外部参数中的平移向量。flags: 标定过程中的额外标志,用于指定标定的一些选项。返回值:
retval: 标定的重投影误差。
cv.getOptimalNewCameraMatrix是OpenCV库中用于计算优化的新相机内部参数矩阵的函数。这个函数通常在图像畸变矫正时使用,以进一步调整相机内部参数,从而获得更好的校正效果。newCameraMatrix, validPixROI = cv.getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, alpha, newImageSize)
cameraMatrix: 原始相机的内部参数矩阵,通常是通过相机标定得到的。distCoeffs: 相机的畸变系数,也是通过相机标定得到的。imageSize: 输入图像的尺寸,通常是一个包含图像宽度和高度的元组。alpha: 控制视场的缩放因子。当alpha=0时,返回的新相机内部参数矩阵仅包含有效像素;当alpha=1时,返回的新相机内部参数矩阵包含完整的像素。newImageSize: 可选参数,新图像的尺寸。如果为None,则使用输入图像的尺寸。返回值:
newCameraMatrix: 优化后的新相机内部参数矩阵。validPixROI: 一个元组,包含四个整数值,表示新图像中包含有效像素的矩形区域。
cv.undistort是OpenCV库中用于图像畸变矫正的函数。在相机标定过程中,我们通常会估计相机的内部参数和畸变系数。cv.undistort函数通过这些标定参数,对图像进行畸变矫正,使图像中的直线和形状更加真实,减少由于相机畸变引起的形变undistorted_image = cv.undistort(src, cameraMatrix, distCoeffs, newCameraMatrix)
src: 输入图像,即待矫正的图像。cameraMatrix: 相机的内部参数矩阵,通常是通过相机标定得到的。distCoeffs: 相机的畸变系数,也是通过相机标定得到的。newCameraMatrix: 可选参数,新的相机内部参数矩阵,用于进一步调整视场。如果为None,则使用原始相机内部参数矩阵。返回值:
undistorted_image: 矫正后的图像。
3.代码演示
import numpy as np
import cv2 as cv
import glob
# 终止标准
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 准备对象点, 如 (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((6*7,3), np.float32)
objp[:,:2] = np.mgrid[0:7,0:6].T.reshape(-1,2)
# 用于存储所有图像对象点与图像点的矩阵
objpoints = [] # 在真实世界中的 3d 点
imgpoints = [] # 在图像平面中的 2d 点
images = glob.glob('*.jpg')
for fname in images:
img = cv.imread(fname)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 找到棋盘上所有的角点
ret, corners = cv.findChessboardCorners(gray, (7,6), None)
# 如果找到了,便添加对象点和图像点(在细化后)
if ret == True:
objpoints.append(objp)
corners2 = cv.cornerSubPix(gray,corners, (11,11), (-1,-1), criteria)
imgpoints.append(corners)
# 绘制角点
cv.drawChessboardCorners(img, (7,6), corners2, ret)
cv.imshow('img', img)
cv.waitKey(500)
cv.destroyAllWindows()
 ?
?
矫正
?
import numpy as np
import cv2 as cv
import glob
# 终止标准
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 准备对象点, 如 (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((6*7,3), np.float32)
objp[:,:2] = np.mgrid[0:7,0:6].T.reshape(-1,2)
# 用于存储所有图像对象点与图像点的矩阵
objpoints = [] # 在真实世界中的 3d 点
imgpoints = [] # 在图像平面中的 2d 点
images = glob.glob('*.jpg')
for fname in images:
img = cv.imread(fname)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 找到棋盘上所有的角点
ret, corners = cv.findChessboardCorners(gray, (7,6), None)
# 如果找到了,便添加对象点和图像点(在细化后)
if ret == True:
objpoints.append(objp)
corners2 = cv.cornerSubPix(gray,corners, (11,11), (-1,-1), criteria)
imgpoints.append(corners)
# 绘制角点
cv.drawChessboardCorners(img, (7,6), corners2, ret)
ret, mtx, dist, rvecs, tvecs = cv.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
img2 = cv.imread(fname)
h, w = img.shape[:2]
newcameramtx, roi = cv.getOptimalNewCameraMatrix(mtx, dist, (w, h), 1, (w, h))
# 矫正
dst = cv.undistort(img2, mtx, dist, None, newcameramtx)
# 裁切图像
x, y, w, h = roi
dst = dst[y:y + h, x:x + w]
cv.imwrite('calibresult.png', dst)
cv.destroyAllWindows()

4.总结?
总结一下上面的叙述,首先是理解整个相机校准的原理,然后是通过代码进行进一步叙述,首先还是检测角点,如果是棋盘检测可以用上面的代码,也有很多其他检测角点的方法在上面简单提了一下,然后是通过角点位置,包括3d点(世界坐标系中的三维点)和2d点位置(图像检测出的角点坐标),接着利用calibrateCamera计算相机参数(旋转,平移等),最后通过计算出的相机参数来矫正图片,使得图片尽量在平面上是以平面的形式展示。注意:检测角点和计算相机参数都需要通过额外的方法来修正。
下面简单演示一下用Harris检测角点的效果
import numpy as np
import cv2 as cv
# 终止标准
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 准备对象点,如 (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((6*7,3), np.float32)
objp[:,:2] = np.mgrid[0:7,0:6].T.reshape(-1,2)
# 用于存储所有图像对象点与图像点的矩阵
objpoints = [] # 在真实世界中的 3D 点
imgpoints = [] # 在图像平面中的 2D 点
# 图像路径
image_path = r'C:\Users\xiaoou\Desktop\picture\chess.jpg'
# 读取图像
img = cv.imread(image_path)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 使用 cornerHarris 找到角点
dst = cv.cornerHarris(gray, 2, 3, 0.04)
print(dst.shape)
# 通过阈值筛选角点
img[dst > 0.01 * dst.max()] = [0, 0, 255]
# 寻找非零像素的坐标
y, x = np.nonzero(dst > 0.01 * dst.max())
# 将坐标转换为图像点格式
corners = np.vstack([x, y]).T.reshape(-1, 1, 2).astype(np.float32)
# 如果找到了,便添加对象点和图像点(在细化后)
if corners.shape[0] >= 42:
# print(objp.shape)
# print(corners.shape)
objpoints.append(objp)
imgpoints.append(corners[:42])
# 绘制角点
cv.drawChessboardCorners(img, (7, 6), corners, True)
cv.imshow('img', img)
cv.waitKey(0)
本次实验主要演示了三维重建中的相机校准,这对于要学自动驾驶或者三维重建的小伙伴都是要学的一门基础,主要函数方法怎么实现这里也不再一一介绍了。
如有错误或遗漏,希望小伙伴批评指正!!!!?
希望这篇博客对你有帮助!!!!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!