【六大排序详解】终篇 :冒泡排序 与 快速排序
终篇 :冒泡排序 与 快速排序
1 冒泡排序
1.1 冒泡排序原理
冒泡排序如同泡泡上升一样,逐个逐个向上冒,一个接一个的冒上去。两两比较,较大者(较小者)向后挪动。全部遍历一遍即可完成排序。
1.2 排序步骤
- 首先从头开始,两两相互比较。每次排好一个最大(最小)
- 然后在从头开始,两两比较 至已排序部分之前。
- 依次往复,全部遍历一遍。
- 完成排序。
1.3 代码实现
以排升序为例
void BubbleSort(int* a, int n)
{
for (int i = 0; i < n; i++) //从头开始遍历
{
//每次遍历 会排完一个 需排序部分减少 1
for (int j = 0; j < n - 1 - i;j++)
{ //结束条件 a[n-2] > a[n-1]
if (a[j] > a[j + 1]) //如果大,向上冒
{
int tmp = a[j];
a[j] = a[j + 1];
a[j + 1] = tmp;
}
}
}
}
排序结果,非常顺利。

冒泡排序的特性总结:
- 冒泡排序是一种非常容易理解的排序
- 时间复杂度:O(N^2)
- 空间复杂度:O(1)
- 稳定性:稳定
2 快速排序
2.1 快速排序原理
快速排序是一种高效快速的算法,是Hoare于1962年提出的一种二叉树结构的交换排序方法,
其基本思想为:任取待排序元素序列中的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后最左右子序列重复该过程,直到所有元素都排列在相应位置上为止。
根据其思想 ,便有递归版本 和 非递归版本。
递归版本中有 Hoare版本, Hole版本,前后指针版本。
非递归版本使用 栈 来实现。
2.1.1 Hoare版本
Hoare版本是一种非常巧妙的版本,其思路大致为(以排升序为例)
- 确定一个key值,然后右找较大值,左找较小值
- 交换,直到左右相遇,
- 相遇时, 相遇位置的值一定小于key值(取决于先找大还是先找小,先找大,则为较小值,否则反之),交换key 与 相遇位置的值。
- 此时满足左边都比key小,右边都比key大
- 然后再分别进行左部分和右部分的排序。
- 全部递归完毕,排序完成。
代码实现
//交换函数
void Swap(int* p1, int* p2) {
int tmp = *p1;
*p1 = *p2;
*p2 = tmp;
}
//key 取中位数
int getmidi(int *a,int begin,int end) {
int midi = (begin + end) / 2;
if (a[midi] > a[begin]) {
if (a[midi] < a[end]) return midi;
else if (a[begin] > a[end]) return begin;
else return end;
}
else {//a[midi]<a[begin]
if (a[begin] < a[end]) return begin;
else if (a[midi] > a[end]) return midi;
else return end;
}
//Hoare版本快速排序
int PartSort1(int* a, int left, int right) {
//取key 为首元素
int keyi = left;
//开始交换,右找大,左找小
while (left < right) {
//右找大
while (left < right && a[right] >= a[keyi]) {
right--;
}
//左找小
while (left < right && a[left] <= a[keyi]) {
left++;
}
//交换
Swap(&a[left], &a[right]);
}
//将key与相遇位置值交换,
//满足左边都比key小,右边都比key大
Swap(&a[keyi], &a[left]);
keyi = left;
}
//快速排序主体
void QuickSort(int* a, int begin, int end) {
//递归实现
if (begin >= end) return;
// 定义左边,右边与key相应位置。
int left = begin, right = end ;
int keyi = begin;
//该步骤优化十分重要。
int midi = getmidi(a, begin, end);
Swap(&a[left], &a[midi]);
//排序
int key = PartSort1(a, left, right);
QuickSort(a, begin, key-1);
QuickSort(a, key+1, end);
}
我们来看看运行效果。

2.1.2 hole版本
Hole版本即为挖坑法,是对Hoare版本的优化,避免了许多容易出现的错误。其基本思路为(排升序为例)
- 确定一个key值,在该处形成坑位
- 右找较大值,进入坑位,然后在该较大值处形成新的坑位
- 左找较小值,进入坑位,然后在该较小值处形成新的坑位。
- 。。。反复进行至相遇时,把key值放入该坑位。
- 此时满足左边都比key小,右边都比key大
- 然后再分别进行左部分和右部分的排序。
- 全部递归完毕,排序完成。
代码实现
主体与上面的Hoare相同,这里提供挖坑法的函数部分。
int PartSort2(int* a, int left, int right) {
int key = a[left]; //key取左值
int holei = left;
//开始排序
while(left < right){
//右找大
while (a[right] >= key && right > left) {
right--;
}
//进坑 挖坑
a[holei] = a[right];
holei = right;
//左找小
while (a[left] <= key && right > left) {
left++;
}
//进坑 挖坑
a[holei] = a[left];
holei = left;
}
//结束时,key进坑。完成排序
a[holei] = key;
return left;
}
2.1.3 前后指针法
前后指针算法是不同于上面两种的独特算法,较为简单。其基本思路为(以排升序为例):
- 首先取key值,并定义两个指针,分别指向当前位置与下一位置
- 如果cur 指向的值比key小,prev++。然后交换prev和cur指针指向的内容
- cur++;
- 直到cur到末位置。
- 交换key和prev指针指向的内容交换。
- 此时满足左边都比key小,右边都比key大
- 然后再分别进行左部分和右部分的排序。
- 全部递归完毕,排序完成。

代码实现
主体与上面的Hoare相同,这里提供前后指针法的函数部分。
void Swap(int* p1, int* p2) {
int tmp = *p1;
*p1 = *p2;
*p2 = tmp;
}
int PartSort3(int* a, int begin, int end) {
int key = a[begin];
int prev = begin, cur = prev + 1;
while (cur <= end) {
if (a[cur] < key) {
prev++;
if (prev != cur)
Swap(&a[cur], &a[prev]);
}
cur++;
}
Swap(&a[begin], &a[prev]);
return prev;
}
2.1.4 注意
取中位数
接下来来看两组测试数据,一组为随机十万数据,一组为有序十万数据。
不取中位数版本 与 取中位数版本。
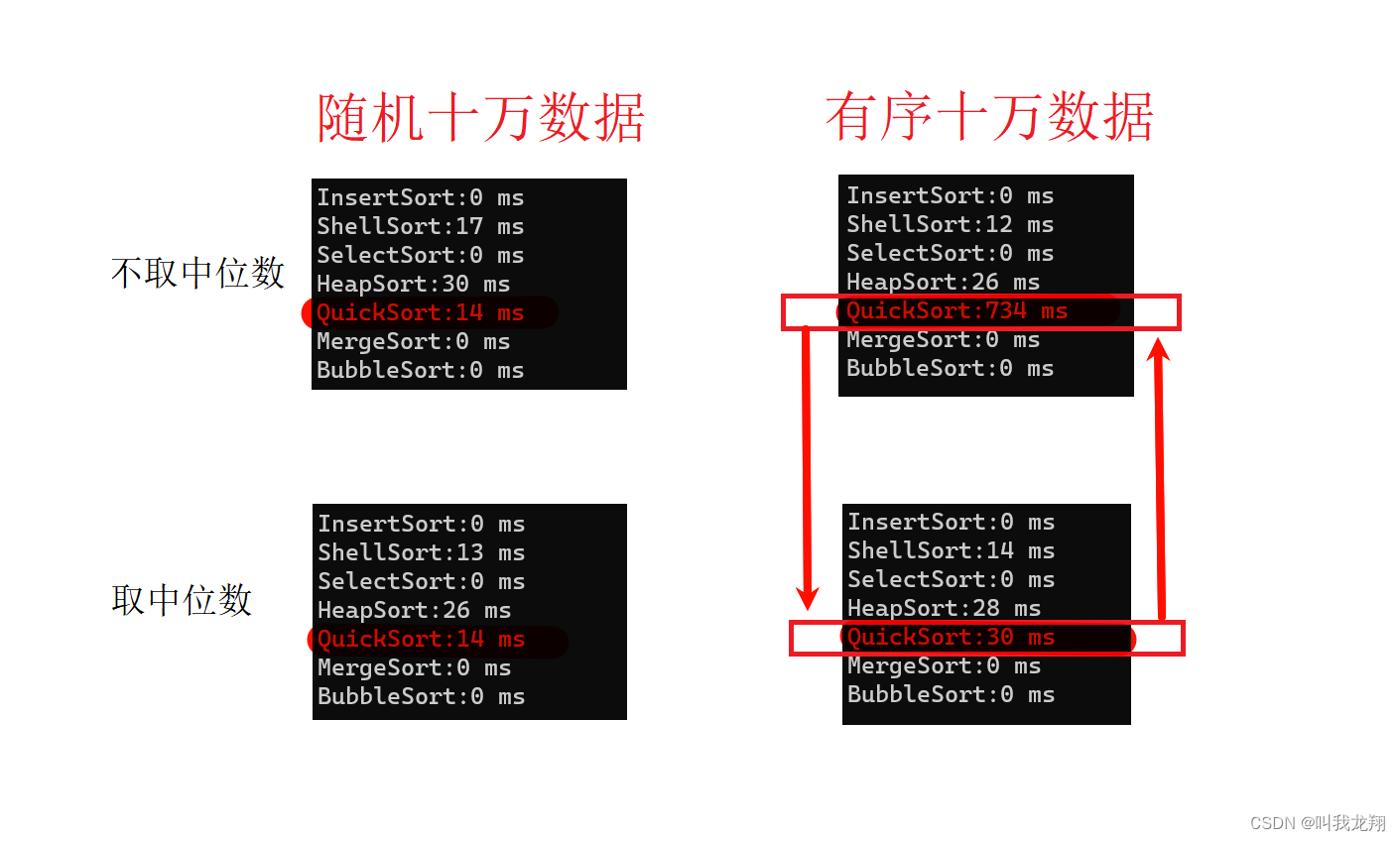
这是肉眼可见的性能提升,防止了再有序情况下的逐个遍历。因此取中位数是很重要的一步,当然一般情况下不会遇到最坏情况。
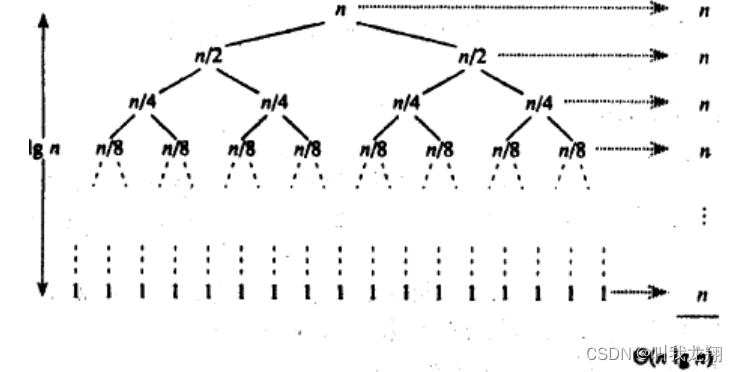
局部优化
根据二叉树的相关知识,最后一层包含50%数据,倒数第二层包含25%数据,倒数第三层包含12.5%数据。
第n层 递归 1 次 第 n-1 层 递归 2 次 第 n - 2 层 递归 4 次 … 第 1 层 递归 2^n 次
所以在进行绝大部分的排序后,如果继续进行递归会存在问题,此时递归次数非常多。所以我们进行局部优化,在数据小于10个(取决于具体数据)时改换为插入排序等稳定算法即可。
2.1.5 非递归版本
非递归算法通常要使用一些循环来达到全部遍历的目的。也使得 非递归版本 比 递归版本 更需要对“递归”的深入理解,这里快速排序的非递归版本使用栈来模拟递归过程。
非递归原理
先看递归的实现过程,先对整体排,然后排左部分,排右部分。接着对左进行相同处理,对右进行相同处理。
这样的过程可以通过栈来实现(当然使用数组进行指定操作也可以)
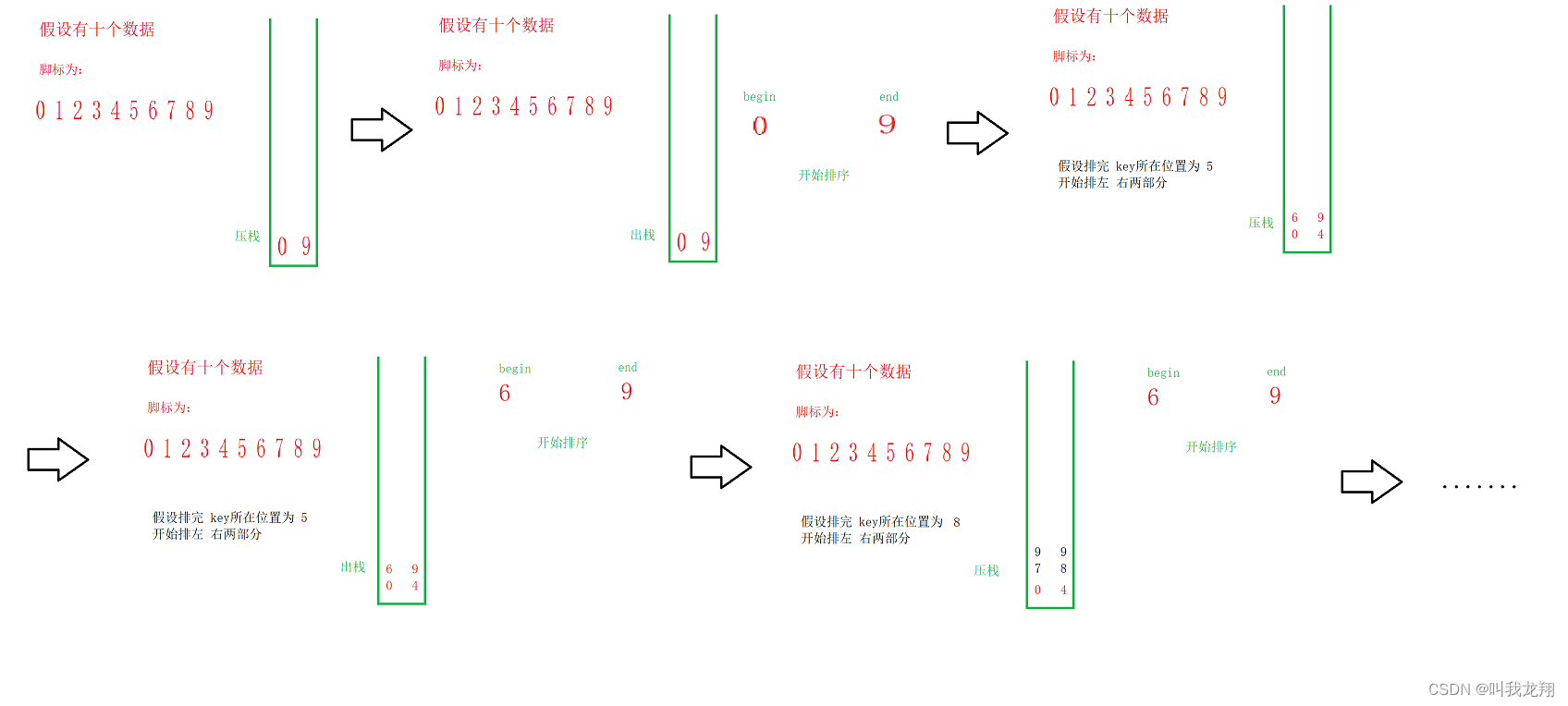
栈里面依次存放了应该排序的部分,每次取出两个,来进行排序(注意取出顺序与存入顺序相反,若先入左 则先取的为右),排序完毕,存入左右部分的开始位置与结束位置,直到有序。
排序步骤
- 存入开始位置begin 结束位置end ,key值取左值。
- 依次出栈 记录右位置 right ,左位置 left(读取顺序很重要),排序 该部分
- 以key值分割左右两部分,压栈存入左部分的开始与结束位置,压栈存入右部分的开始与结束位置。(若left >= key不读取左部分 若 right<=key 不读取右部分)
- 依次出栈 记录右位置 right ,左位置 left(读取顺序很重要),排序 该部分
- 重复2 - 3步骤,直到栈为空。
- 完成排序
代码实现
需要使用栈的相应函数,栈的具体内容请看
栈相关知识
//非递归排序
void QuickSortNonR(int* a, int begin, int end) {
//建立栈
Stack s ;
StackInit(&s);//初始化
//压入开始与结束位置
StackPush(&s, begin);
StackPush(&s, end);
//开始排序
while (!StackEmpty(&s)) {//不为空就继续进行
//出栈读入右位置
int right = StackTop(&s);
//读取后删除
StackPop(&s);
//出栈读入左位置
int left = StackTop(&s);
//读取后删除
StackPop(&s);
//对该部分进行排序 这里使用前后指针法(使用三种其一即可)
int keyi = PartSort3(a, left, right);
//读取左部分 若left>=key不进行读入
if (left < keyi) {
//入栈
StackPush(&s, left);
StackPush(&s, keyi - 1);
}
//读取右部分 若right<=key不进行读入
if (right > keyi) {
//入栈
StackPush(&s, keyi + 1);
StackPush(&s, right);
}
}
}
2.2 特性总结
快速排序的特性总结:
-
快速排序整体的综合性能和使用场景都是比较好的,所以才敢叫快速排序
-
时间复杂度:O(N*logN)
-
空间复杂度:O(logN)
-
稳定性:不稳定
总的来说快速排序的内容十分丰富。我个人感觉使用前后指针来实现快速排序比较简单。同时非递归版本可以让我们更深刻的认识递归过程。而且不同版本的性能大差不差,基本相同。
谢谢阅读Thanks?(・ω・)ノ
下一篇文章见!!!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!