GNSS观测值线性组合
2024-01-07 19:01:55
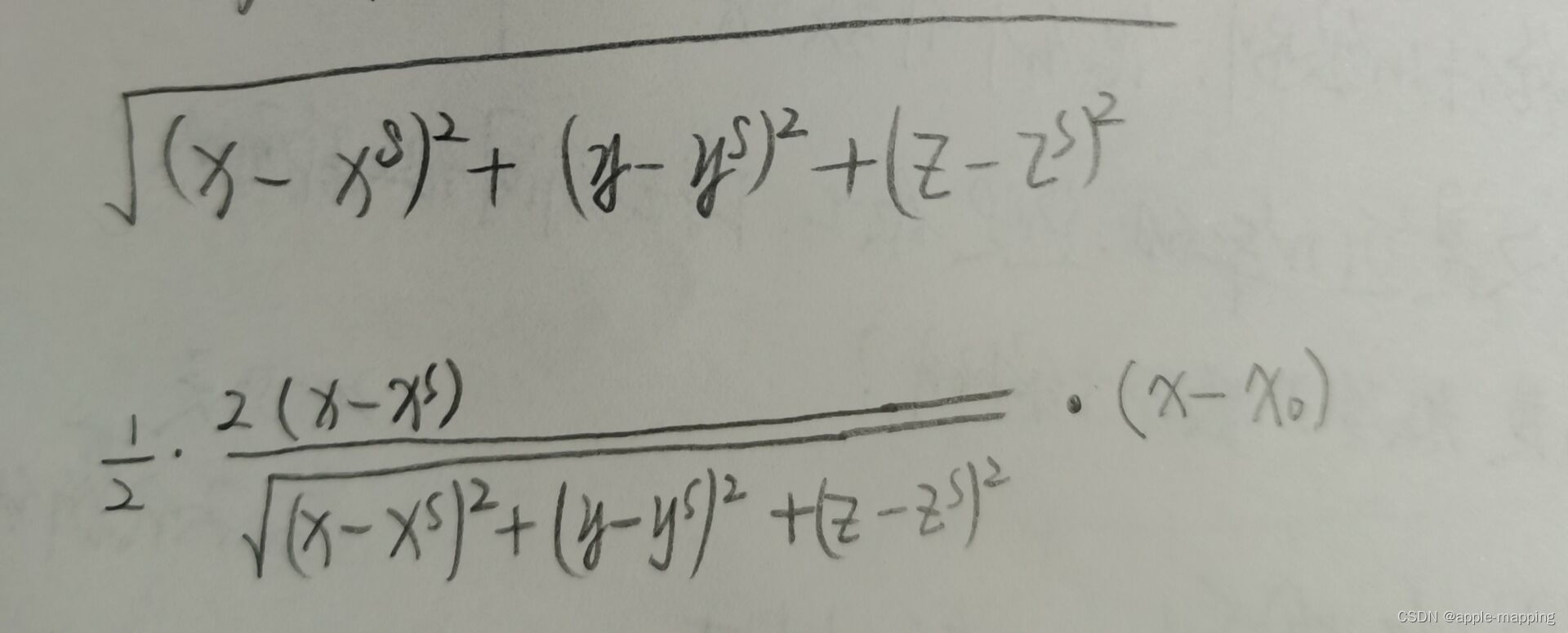
1 在几何距离线性化中,不论变量x的估计值是多少,估值改正数的系数是不变的。
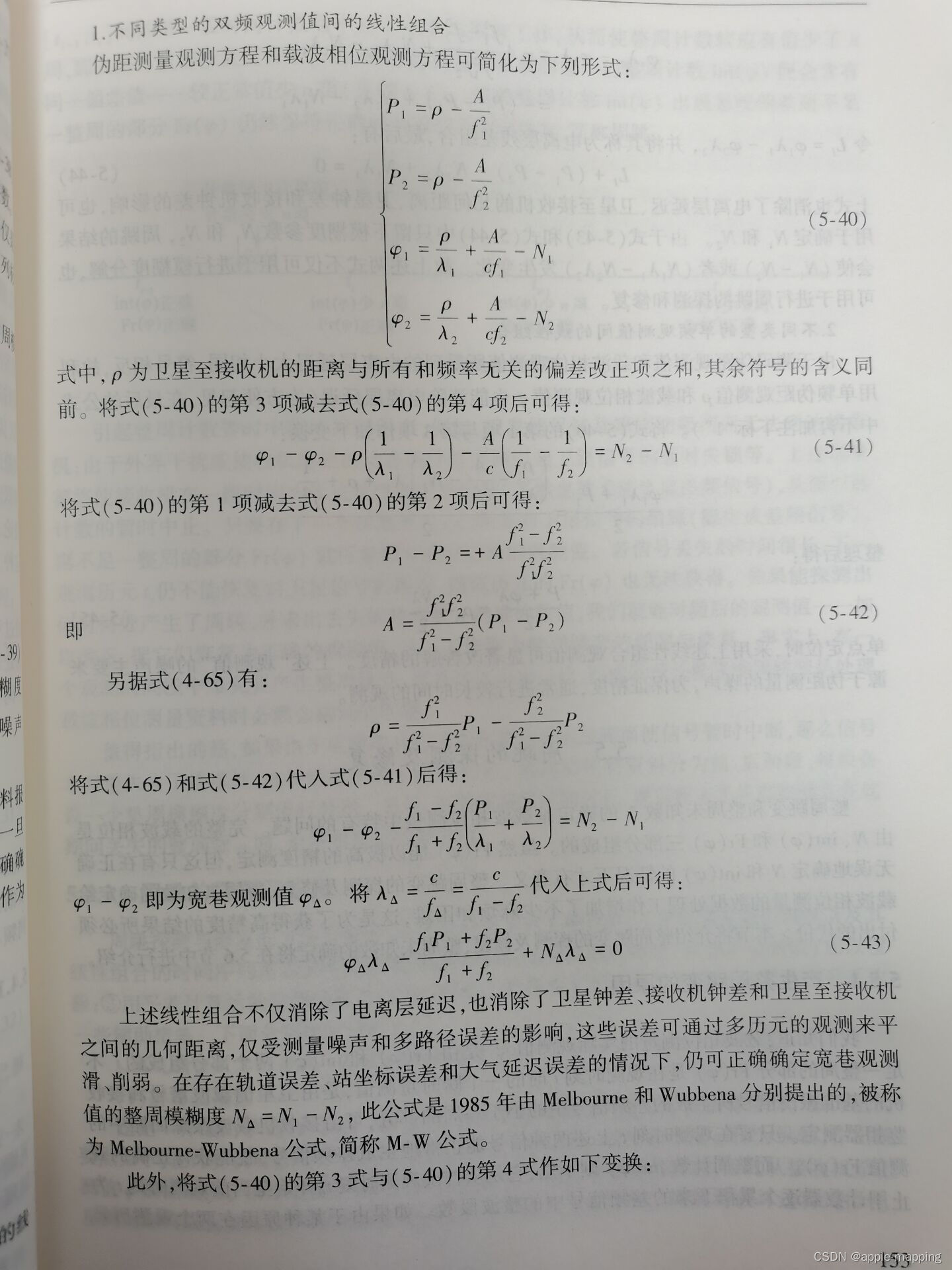
2.宽、窄巷组合(噪声放大倍数)
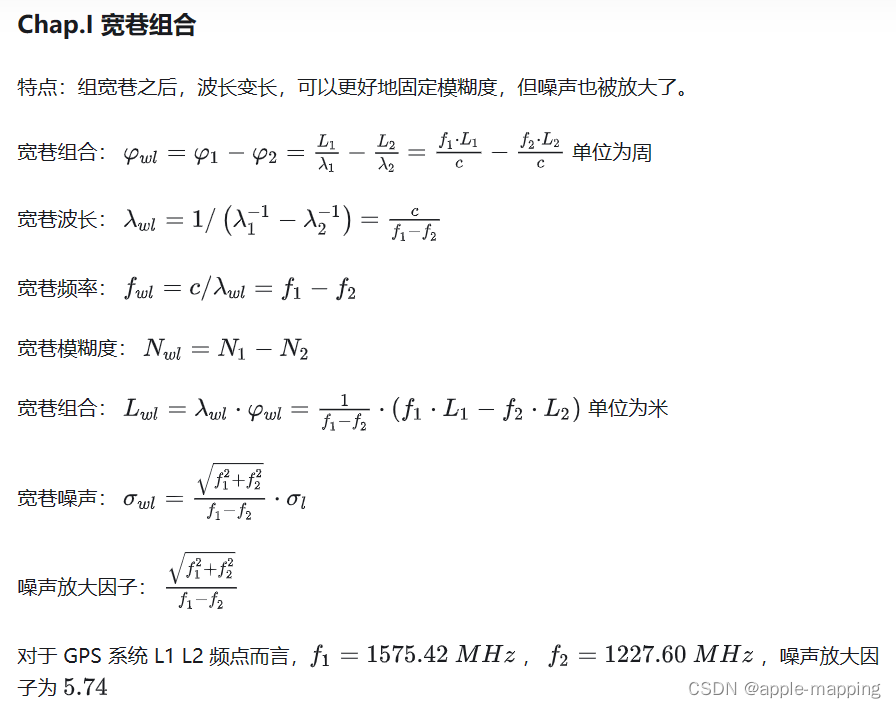
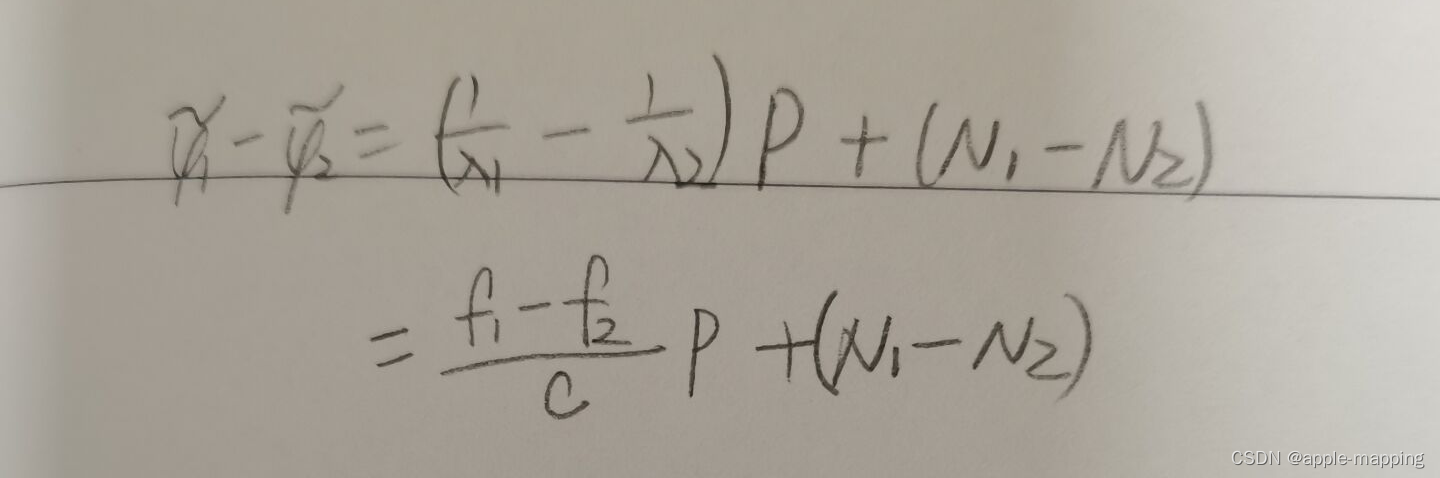
由于几何距离与频率无关,在宽巷组合中,可直接依据几何距离,四舍五入确定宽巷模糊度

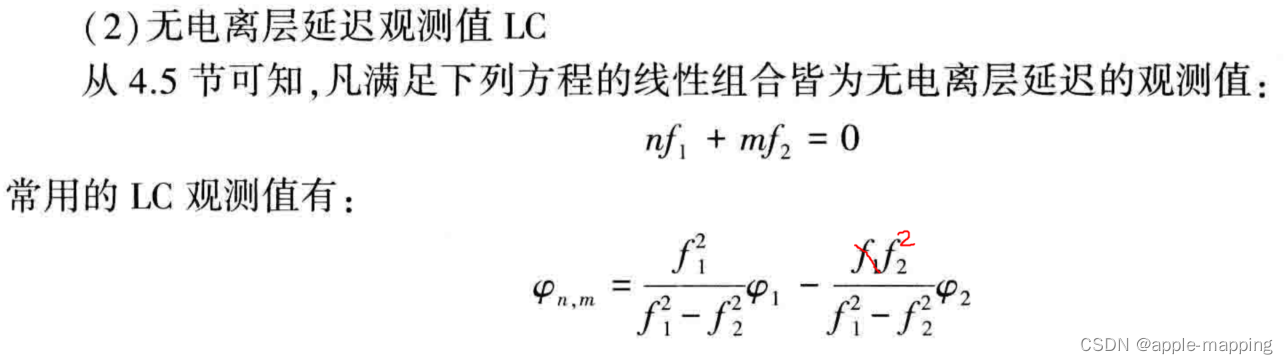
3 .无电离层延迟观测值:
https://blog.csdn.net/wuwuku123/article/details/106497131/
由于几何距离p与频率无关,所以观测量乘以系数相减过后仍然为几何距离p
4 可依据MW公式计算宽巷模糊度。
MW组合消除了电离层延迟、卫星钟差、接收机钟差及卫星和接收机间的几何距离,仅受测量噪声和多路径误差的影响。
5 电离层残差组合
https://blog.csdn.net/Gou_Hailong/article/details/109905879
电离层残差组合可用来探测周跳:L1-lambda2/lamda1L2 GPS测量与数据处理 158页(4)
电离层残差组合虽然可以用来探测小周跳,但是如果两个频率上同时发生周跳,且满足N1=lambda2/lamda1N2时,则该方法失效;
6 星间单差运算,方差阵的变化
这里第二颗卫星为参考卫星,单差算子为最左侧的矩阵
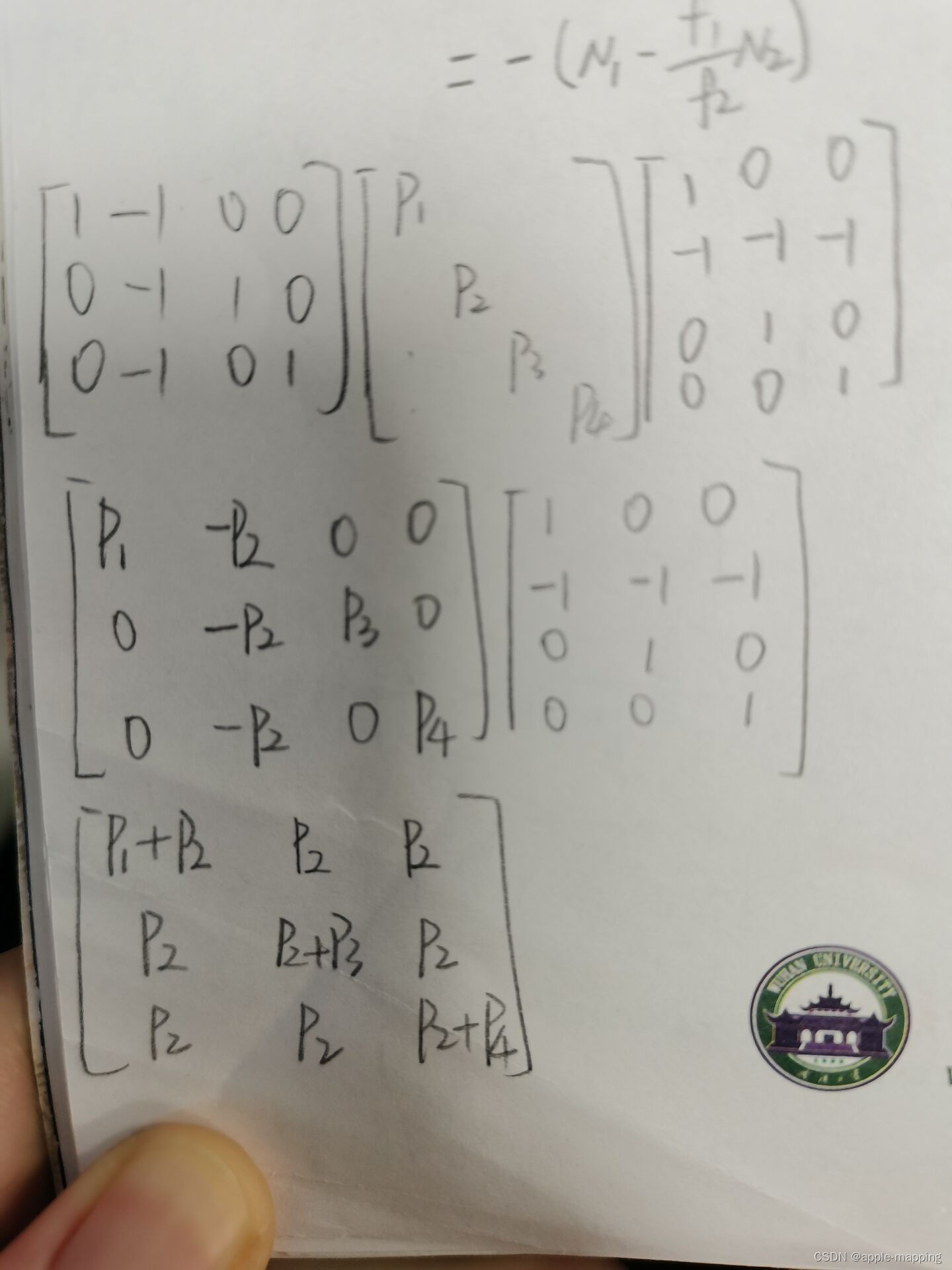
%单差 双差 协方差阵确定
n=4;
G=[eye(n-1), -ones(n-1,1)]; % 协方差阵 前 的系数矩阵
P=diag([1,2,3,4]);%4*eye(4);
P2 = G*P*G';
q_R = 1 ./ (sin(elR * pi/180).^2); %高度角定权
q_M = 1 ./ (sin(elM * pi/180).^2);
q_RP = q_R(pivot_index,1); % ROVER-PIVOT
q_MP = q_M(pivot_index,1); % MASTER-PIVOT
q_R(pivot_index) = [];
q_M(pivot_index) = [];
q_RS = q_R; % ROVER-generic satellite (without pivot)
q_MS = q_M; % MASTER-generic satellite (without pivot)
Q = (q_RP + q_MP) * ones(n) + diag(q_RS + q_MS);
文章来源:https://blog.csdn.net/qq_40230540/article/details/135439925
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!