【文献精读】【通信】Theoretical Model and Experiments of Focused Phased Array for Cross-Medium Communication
渣翻:《发射机跨水-空介质通信聚焦相控阵的理论模型与实验》
文章目录:
????????0. Abstract & Index Terms
????????2.CROSS-MEDIUM FOCUSED PHASED ARRAY MODELING
????????C.Sensitivity Analysis
????????3.SIMULATION OF CMFPA MODEL
????????5.CMFPA MODEL VERIFICATION
6.SISO AND MISO COMMUNICATION EXPERIMENTS
????????A.Varying Transducer Depth
????????B.Varying Deviation Distance
0. Abstract & Index Terms
文章主要涉及跨水-空介质的直接通信。?
首先作者们总结并分析了三种不同的跨介质通信系统,激光诱导声学(LIA)系统、视线(LOS)光链路和平移声学射频(TARF)系统。
然后作者们着重提出了一种跨介质聚焦相控阵(CMFPA)模型,通过多输入单输出(MISO)系统,可以提高跨介质通信质量。
关键词:声学、阵列、跨介质通信、毫米波。
本文术语:
LIA:激光诱导声学
LOS:视线光链路
TARF:平移声学射频
CMFPA:跨介质聚焦相控阵
1.INTRODUCTION
作者们先是总结了三种不同的跨介质通信系统,激光诱导声学LIA(laser-induced acoustic),视线光链路LOS(line-of-sight),平移声学射频TARF(translational acoustic radio frequency);
a.激光诱导声学LIA系统中,水-空界面上方的激光发射器发出激光,加热水表面,将热能转化为声能,从而实现跨介质通信;问题在于,性能不太稳定,重复性差。
b.视线光链路LOS系统中,水-空界面两侧都有激光发射/接受器,激光穿透介质面,从而实现跨介质通信;问题在于,对水-空介质情况、发射接收器状态非常敏感。
c.平移声学射频TARF系统中,水-空界面下方的换能器发送声波冲击水-空界面,引起微小的振动,水面上的雷达能探测到这些微小的振动(微米级);问题在于振幅太小了不显著,以及对雷达、换能器对准的要求高(不对准SNR低)。
那么一个问题来了:在真实海洋环境中,发射/接收机其实挺难对准的。
(如下图Fig.1,发射/接收机没对准的典型情况,一个是单纯没对准,一个是水下潜器工作完要回去对准时不好对准)
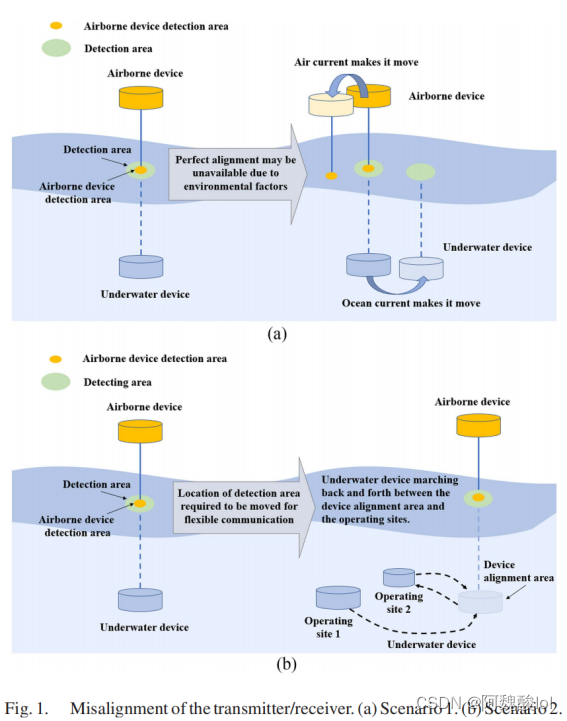
作者们就提出了一种跨介质聚焦相控阵(CMFPA)模型,来提高错位场景下的通信质量。
(如下图Fig.2)

作者们做的主要工作:
1)作者使用了多个大功率水下源,如Fig.2。
其一,“多个大功率”可以提高空-水界面探测处(detecting area)的振幅强度;其二,“多个”可以使用时延的波束成型(beam-forming)得个角度可以使探测处变动。
2)作者在自由表面动力学和水面张力条件下仿真模拟了一下,(仿真结果笔者没看懂,原文It reveals that the interference phenomenon of water surface waves with two underwater speakers exists under the water surface tension condition, and disappears under the water surface tension condition. 好像是水面水波的振幅由于传播损失、反射损失和水面张力而随距离迅速衰减,这个符合先前提出的理论?)此外,经合适设计的阵列本身也能提高/扩大通信时界面处的振幅和探测区域。
3)在消声水池做了实验,结果表明阵控的MISO系统相较于SISO能够提高检测点的波幅,并在收发机不严格对准时能够进行通信。
作者们的贡献:
1)推导了发射机/接收机错位时TARF系统的第一个理论CMFPA模型。
2)在自由表面动力学和水面张力条件下,模拟了不同构型的CMFPA引起的水面波的振动。
3)通过消声水池实验验证了CMFPA模型;与SISO系统相比,MISO系统具有良好的跨介质通信性能。
2.CROSS-MEDIUM FOCUSED PHASED ARRAY MODELING
本部分提出并分析了CMFPA模型。
A.Single Source
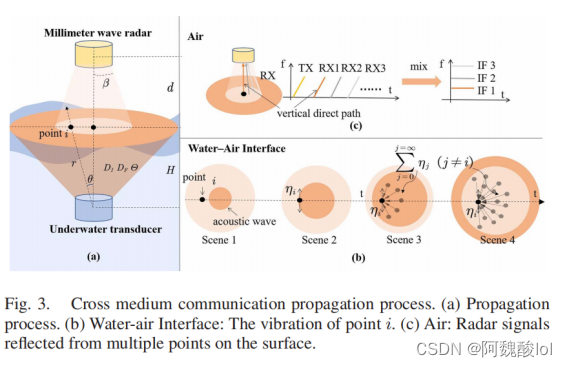
单个声源的模型如Fig.3,分为水下Underwater、水-空界面Water-Air Interface、空中Air几个部分
1)Underwater
水下声压公式

功率放大器增益为Gtx,方向性为DI,传感器对不同频率的修正系数Df,传播距离为r,P为源功率,ρ为水密度,c为水中声速,波束宽度为Θ,α为衰减系数
2)Water-Air Interface
界面处的波由两个波叠加成:一个是直接到达的声波,另一个是附近点受声波撞击后振动产
生的表面波。
声波部分,由声波引起的水面微振幅波可以用线性小振幅波理论来模拟,
声波引起部分的振幅公式

pi是入射的声压,ω是微波的角频率;
ω由下式表征(这里引用了 Z. Lieshan, “Study on optical heterodyne detection technique of acoustic wave induced surface micro-waves,” Ph.D. dissertation, Instrum. Sci. Technol., Harbin Inst. Technol., Harbin, China, 2017.)

σ为水面张力系数,g为重力的加速度,ρ为水的密度,k为微振幅表面波的波数
(笔者注:这里的A(t)后边要用)
表面波部分
由声波引起水表面的声学感应波(表面波)
在第i点处的声学感应波(表面波)为(如Fig.3(b))

假设点i是坐标原点,并且(x2 + y2)^0.5是原点与其他点之间的距离。ω表示声信号的角频率,k表示波束。
考虑声波会激励探测区域内的所有点产生声学感应波(表面波),需对(4)式作叠加求和,并考虑噪声,有
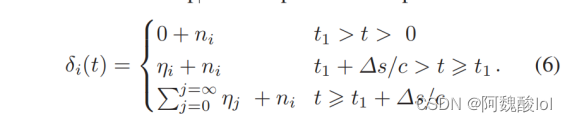
(这里的δ后边要用)
3)Air
雷达向水面发送连续调频波(FMCW)来检测振动。
雷达接收到反射信号分为两个主要部分,一个是从由源引起的水面振动区域反射回来的波,另一个是从非振动区域的环境波反射回来的波。
但我们可以知道,垂直发送并反射的雷达信号应最早到达,其相位表示了当前的采样点。

λradar为雷达传输信号的波长,h为雷达与水面高度。
通过对时变相位信号φ(t)进行滤波和解调,可以得到原始的传输声信号。
B.Multi Sources
多个声源可利用时延的波束形成(beam-forming)
使用4元圆阵,布放如Fig.4
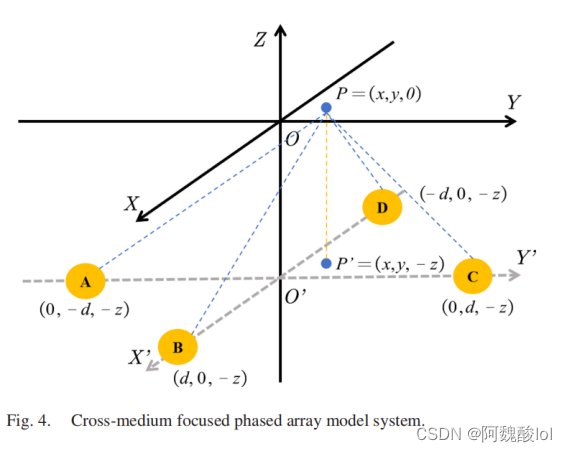
四个源传输信号的相位表示如下
从每个源传输的信号的时延为

来自单源(以A源(0,-d,-z)为例)的检测点信号可以表示为

其中δ和A(t)都是前面单源中得到的;
经叠加得到检测点总的信号

那么我们再代入到反射雷达的相位中就有

C.Sensitivity Analysis
如何算探测到信号?
雷达垂直发射/接收(直接路径)后,接收到的信号强度过了检测阈,算作可以接收到。
在忽略了水-空界面处的其他点的振动后,雷达接收到的相位可以表示为

或者(声源数为N)

3.SIMULATION OF CMFPA MODEL
这部分是不同情况下对CMFPA模型的仿真
A.Simulation Under Free Surface Dynamics Conditions
在自由表面动力学条件下,对水-空界面进行仿真模拟
B.Simulation Under Water Surface Tension Conditions
在水面张力条件下,对水-空界面进行仿真模拟的模拟
C.Varying the Number of Arrays
改变阵元数的情况下,对水-空界面进行仿真模拟
D.Varying the Distance Between Arrays
改变阵元间距离的情况下,对水-空界面进行仿真模拟
E.Varying the Time Delay of the Signal Sent by the Acoustic Source
改变由声源发送信号的时延的情况下,对水-空界面进行仿真模拟
4.EXPERIMENT SETUP
作者们于消声水池进行了跨介质通信实验,装置如Fig.10,主要涉及水下发射系统和空中接收系统。
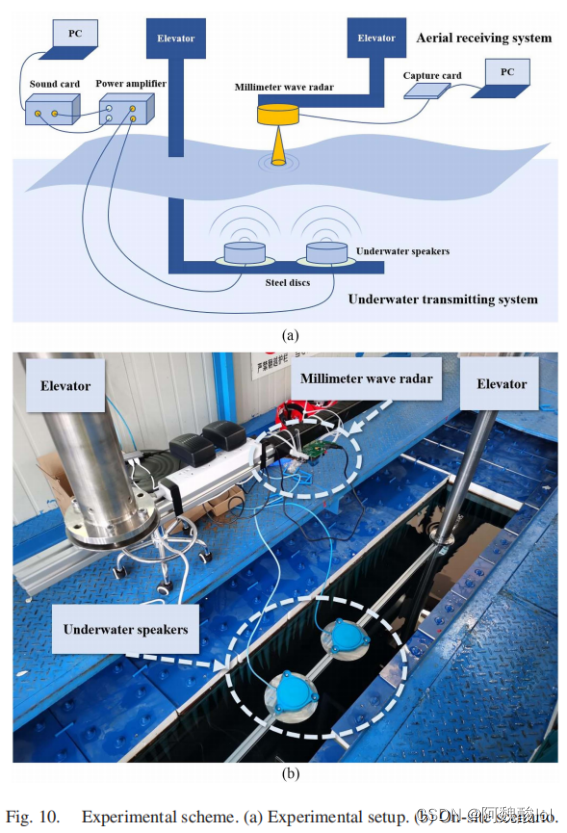
水下发射系统由个人计算机(PC)、声卡、功率放大器和水下发射机组成。PC产生的电信号经功放发送到水下发射机;水下发射器产生声信号,向水面传播,进而产生水面波。
空中接收系统由PC、捕获卡和毫米波雷达组成。雷达发送FMCW信号来检测水面波的振动,然后将采集到的数据收集到采集卡(Capture card),由采集卡发送到PC上进行信号处理。
5.CMFPA MODEL VERIFICATION
这部分将仿真结果与相应的实验结果作比较,为的是验证CMFPA模型(包括单源和多源)。
A.Single Source
SISO系统中,比较了仿真的水面振幅和实验的水面振幅;
结果如Fig.12,可以看到仿真和实验还是比较吻合的

B.Multiple Sources
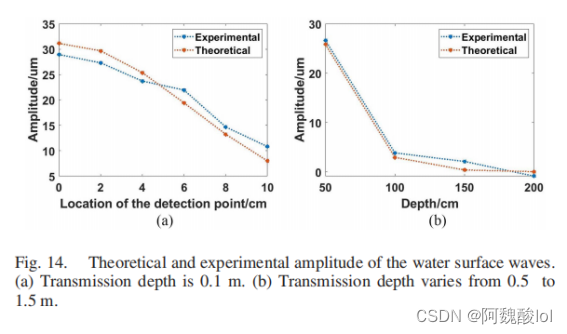
MISO系统中,探测点布局如Fig.13,于空-水界面每隔20mm设置一个探测点,在每个探测点比较仿真的水面振幅和实验的水面振幅;
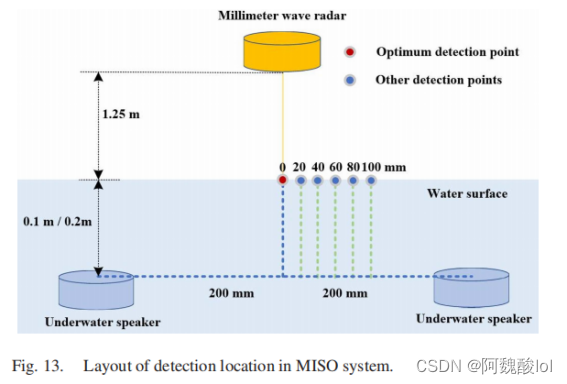
结果如Fig.14,可以看到仿真和实验还是比较吻合的
6.SISO AND MISO COMMUNICATION EXPERIMENTS
SISO系统在真实海洋环境中存在SNR低的问题;在MISO系统中,CMFPA可以用来增强水面波的振幅.
MISO系统中每个水下扬声器的功率是SISO系统的一半,也就是说,每次实验的MISO和SISO的总功率是不变的。
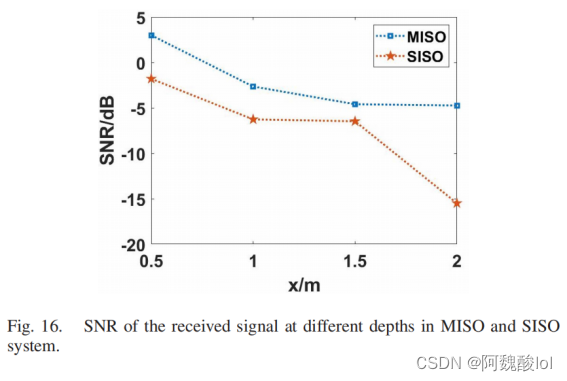
A.Varying Transducer Depth
改变传感器深度进行实验
Fig.16是不同深度下的SNR
结论是MISO系统的 SNR优于SISO系统
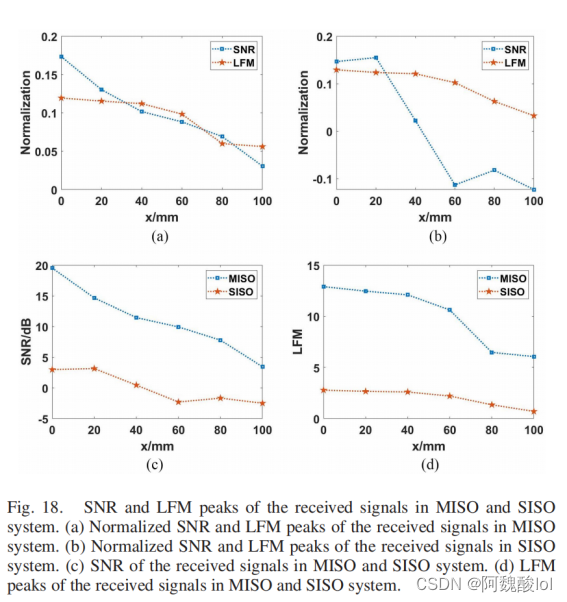
B.Varying Deviation Distance
改变探测点偏差距离进行实验
Fig.17(a)是在MISO系统归一化信噪比和LFM峰值,
Fig.17(b)是在SISO系统归一化信噪比和LFM峰值,
Fig.17(c)是MISO和SISO系统的信噪比。
Fig.17(d)是MISO和SISO系统的LFM峰值。
结论仍然是MISO系统的SNR优于SISO系统
7.CONCLUSION
提出了跨介质通信的CMFPA模型,仿真并验证了CMFPA模型,分析了MISO相对于SISO的优势。
????????
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!