大数据机器学习深度解读DBSCAN聚类算法:技术与实战全解析
大数据机器学习深度解读DBSCAN聚类算法:技术与实战全解析
一、简介
在机器学习的众多子领域中,聚类算法一直占据着不可忽视的地位。它们无需预先标注的数据,就能将数据集分组,组内元素相似度高,组间差异大。这种无监督学习的能力,使得聚类算法成为探索未知数据的有力工具。DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是这一领域的杰出代表,它以其独特的密度定义和能力,处理有噪声的复杂数据集,揭示了数据中潜藏的自然结构。
DBSCAN算法的定义和背景
DBSCAN,全称为“基于密度的空间聚类的应用”,由Martin Ester, Hans-Peter Kriegel, J?rg Sander和Xiaowei Xu于1996年提出。不同于K-means等划分聚类算法,DBSCAN不需要事先指定簇的数量,它能够根据数据本身的特性,自动发现簇的数量。更重要的是,DBSCAN能识别任意形状的簇,同时将不属于任何簇的点标识为噪声,这对于现实世界中充满噪声和非线性分布的数据集尤为重要。
例如,考虑一个电商平台的用户购买行为数据集。用户群体根据购买习惯和兴趣可能形成不同的聚类,而这些聚类并非总是圆形或球形。DBSCAN能够识别用户群体的自然聚集,哪怕是最复杂的形状,如环形分布的用户聚类,这对于划分用户细分市场非常有用。
聚类的重要性和应用领域
聚类在很多领域都有着广泛的应用,从生物信息学中基因表达的分析到社交网络中社区的检测,从市场细分到图像和语音识别,它的用途多样而深远。每个聚类的发现都像是在数据的海洋中发现了一个个岛屿,它们代表着数据中的模式和结构。
聚类的重要性和应用领域
与K-means这种经典聚类算法相比,DBSCAN的优势在于它不需要预设簇的数目,且对于簇的形状没有假设。想象在一个城市中有多个不同的聚会活动,每个活动吸引不同数量和类型的人群。K-means可能会将城市划分成几个大小相近的区域,而无视了每个聚会的实际分布情况。DBSCAN则更像是聪明的侦探,不预设任何犯罪模式,而是根据线索(数据点)自行发现犯罪团伙(数据簇)的大小和形状。
二、理论基础
DBSCAN算法的魅力在于其简洁的定义与强大的实际应用能力。它通过两个简单的参数:邻域半径(eps)和最小点数(minPts),揭示了数据的内在结构。这一节将逐步深入这两个参数背后的理论基础,并通过贴近现实的例子,展现其在数据集上的应用。
密度的概念
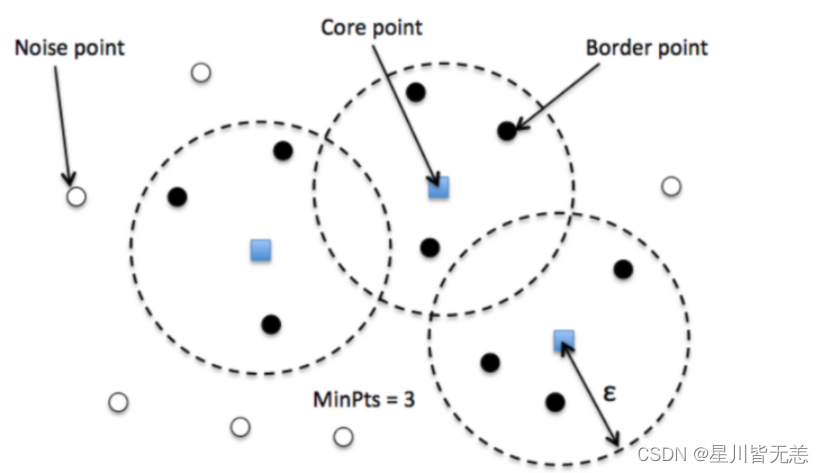
在DBSCAN算法中,密度是由给定点在指定半径内邻域的点数来定义的。具体来说,如果一个点的eps-邻域内至少包含minPts数目的点,这个点就被视为核心点(core point)。这里,eps和minPts是算法的两个输入参数。
举个现实生活中的例子,想象我们要研究一个国家的城市化模式。我们可以将城市中的每个建筑物视作一个数据点,将eps设定为一个建筑物周围的距离(例如500米),minPts设为某个区域内建筑物的最小数量(例如50栋)。那么,任何在500米内有至少50栋其他建筑物的建筑都可以被视为“核心建筑”,指示着城市化的“核心区域”。
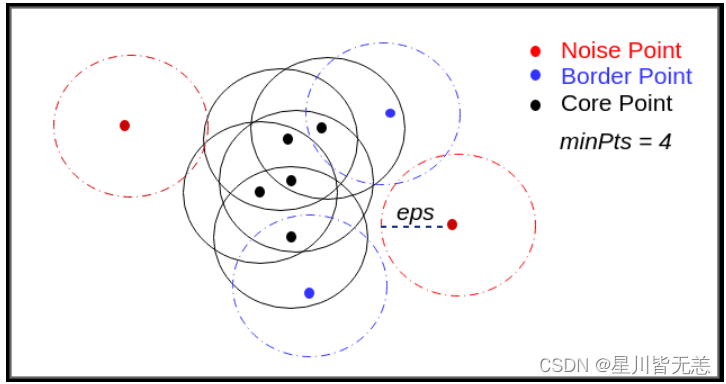
核心点、边界点和噪声点
在密度的定义下,DBSCAN算法将数据点分为三类:
核心点:如前所述,如果一个点的eps-邻域内包含至少minPts数目的点,它就是一个核心点。
边界点:如果一个点不是核心点,但在某个核心点的eps-邻域内,则该点是边界点。
噪声点:既不是核心点也不是边界点的点被视为噪声点。
以城市化的例子来说,那些周围建筑物较少但靠近“核心区域”的建筑可能是商店、小型办公室或独立住宅,它们是“边界建筑”。而那些偏远、孤立的建筑物就好比数据中的噪声点,它们可能是乡村的农舍或偏远的仓库。
DBSCAN算法流程
DBSCAN算法的执行流程可以分为以下步骤:
邻域的查询
对于数据集中的每个点,算法会计算其eps-邻域内的点数。这个过程类似于画家在画布上点画,每个点画都需要考虑其周围一定半径内的颜色深浅,以决定这一点的属性。
聚类的形成过程
选择核心点:如果一个点的eps-邻域内点数超过minPts,将其标记为核心点。
构建邻域链:对每个核心点,将它的eps-邻域内所有点(包括其他核心点)连接起来,形成一个聚类。
边界点的归属:将边界点分配给与之相连的核心点的聚类。
标记噪声:最后,未被归入任何聚类的点被标记为噪声。
回到我们的城市化例子,这就像是通过识别城市中的商业中心区域(核心区域),然后将与其相邻的居民区、商店(边界区域
)纳入同一城市规划单元,而那些偏离主要居民区的地方则被看作是未开发区域。
参数选择的影响
DBSCAN算法的效果在很大程度上取决于eps和minPts这两个参数的选择。参数的不同取值可能会导致聚类结果的显著变化。选择合适的参数需要对数据有一定的了解,通常需要通过多次尝试或基于领域知识进行决定。
以城市化模式研究为例,一个小国家的城市化密度(eps和minPts)与一个大国家可能大不相同。对于一个人口稠密的小岛国,较小的eps和minPts就足够揭示出城市化的核心区域。而对于一个地域辽阔的国家,则需要更大的参数值来捕捉广阔区域内的城市化趋势。
三、算法参数
在DBSCAN算法中,参数的选取决定了算法能否正确地揭示数据的结构。这一节将深入探讨如何挑选合适的邻域半径(eps)和最小点数(minPts),并结合具体例子说明参数选择对聚类结果的影响。
eps(邻域半径)
eps是指点与点之间的最大距离,可以被视为一个点邻域的物理尺寸。选择较小的eps值可能导致聚类过于分散,而过大的eps值可能将本不属于同一类的点强行聚合在一起。
举例说明:
想象我们要分析一张客户分布的地图。如果我们把eps设定得太小,那么只有非常近距离的客户才会被认为是一组,这可能会忽略掉那些只是偶然间相距稍远的客户群体。相反,如果把eps设定得太大,那么本属于不同区域的客户也可能会被错误地分类为一组,从而失去了进行精确市场细分的机会。
如何选择:
选择eps的一个常见方法是使用k-距离图。简单来说,对于数据集中的每一个点,计算它与最近的k个点之间的距离,并绘制这些距离的图。通常,这个图会在合适的eps值处出现一个拐点。
minPts(最小点数)
minPts定义了一个点的邻域中需要有多少个点才能将其视为核心点。minPts的选择与数据的维度、密度和噪声水平密切相关。一般来说,更高的维度和噪声水平需要更大的minPts值。
举例说明:
设想我们在分析社交媒体上的用户群体,试图通过共同的兴趣和活动来发现自然形成的社区。如果minPts太低,我们可能会找到一些只由几个紧密相连的用户组成的“微社区”,但这些可能只是偶然的小圈子。如果minPts太高,我们可能会漏掉这些小但紧密的群体,只识别出大规模的社区,从而忽略了社交媒体动态的多样性。
如何选择:
一种方法是基于经验规则,比如将minPts设置为维度数加1,然而这只适用于较低维度数据。另一种方法是通过试验和领域知识来逐步调整,直到找到反映数据结构的minPts值。
参数调优的技巧
参数的调整不应该依靠猜测,而应该是一个基于数据探索的迭代过程。利用可视化工具来观察不同参数下的聚类结果,评估其对数据分布的合理性。
实战技巧:
数据探索:在调整参数之前,对数据进行彻底的探索,包括可视化和基础统计分析。
领域知识:利用领域知识来指导初步参数的选择。
迭代实验:进行一系列的实验,逐步调整参数,每次变化后都仔细分析聚类结果的变化
。
4. 效果评估:使用轮廓系数等指标评估聚类质量,而不仅仅依赖于视觉上的判断。
5. 工具应用:利用像Python中的sklearn库提供的工具来实现上述过程。
通过综合考虑eps和minPts参数,我们可以有效地利用DBSCAN进行数据的聚类分析。
案例实战
在本节中,我们将通过一个具体的案例来展示如何使用Python和sklearn库中的DBSCAN实现对合成数据集的聚类。我们将演示数据准备、DBSCAN参数的选择、聚类过程以及结果的可视化。
场景描述
假设我们有一组二维数据,代表某城市中的地标位置。我们希望通过DBSCAN算法识别出城市中的热点区域。这些热点区域可能代表商业中心、文化聚集地或其他人群密集的地方。
数据准备
首先,我们需要生成一个合成的二维数据集来模拟地标位置。
import numpy as np
from sklearn.datasets import make_blobs
import matplotlib.pyplot as plt
from sklearn.cluster import DBSCAN
from sklearn.preprocessing import StandardScaler
# 生成合成数据
centers = [[1, 1], [-1, -1], [1, -1]]
X, labels_true = make_blobs(n_samples=750, centers=centers, cluster_std=0.4, random_state=0)
# 数据标准化
X = StandardScaler().fit_transform(X)
DBSCAN聚类
选择DBSCAN的参数,并对数据进行聚类。
# DBSCAN算法实现
db = DBSCAN(eps=0.3, min_samples=10).fit(X)
core_samples_mask = np.zeros_like(db.labels_, dtype=bool)
core_samples_mask[db.core_sample_indices_] = True
labels = db.labels_
# 聚类结果的噪声数据点标记为-1
n_clusters_ = len(set(labels)) - (1 if -1 in labels else 0)
n_noise_ = list(labels).count(-1)
print('Estimated number of clusters: %d' % n_clusters_)
print('Estimated number of noise points: %d' % n_noise_)
结果可视化
最后,我们使用matplotlib来可视化聚类的结果。
# 绘制聚类结果
unique_labels = set(labels)
colors = [plt.cm.Spectral(each) for each in np.linspace(0, 1, len(unique_labels))]
for k, col in zip(unique_labels, colors):
if k == -1:
# 黑色用于噪声点
col = [0, 0, 0, 1]
class_member_mask = (labels == k)
# 绘制核心点
xy = X[class_member_mask & core_samples_mask]
plt.plot(xy[:, 0], xy[:, 1], 'o', markerfacecolor=tuple(col), markeredgecolor='k', markersize=14)
# 绘制非核心点
xy = X[class_member_mask & ~core_samples_mask]
plt.plot(xy[:, 0], xy[:, 1], 'o', markerfacecolor=tuple(col), markeredgecolor='k', markersize=6)
plt.title('Estimated number of clusters: %d' % n_clusters_)
plt.show()
在执行这段代码之后,输出将是聚类的数量和噪声点的数量,以及一幅图表,图表中不同颜色的点表示不同的簇,黑色点表示噪声。这些图像将帮助我们直观地理解DBSCAN在特定参数设置下是如何分隔数据点的。
处理过程与输出
通过上述步骤,我们得到了聚类的数量以及标识噪声的数据点。通过可视化的结果,我们可以看到算法如何将数据点分成不同的簇,以及如何识别出噪声。
注意,为了适应特定的数据集,可能需要对eps和min_samples参数进行调整。这需要根据实际数据和聚类结果的质量来进行迭代实验和优化。在现实世界的应用中,参数的选择往往依赖于对数据的理解和领域知识。
五、最佳实践
最佳适合使用场景
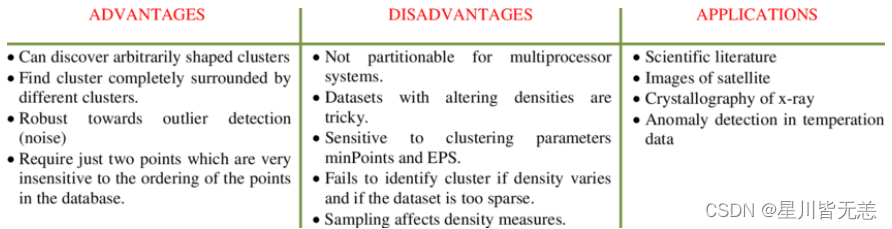
DBSCAN作为一种基于密度的聚类算法,它在以下场景中表现尤为出色:
噪声数据较多的情况: DBSCAN能有效识别并处理噪声点,将其与核心点和边界点区分开。
簇形状多样性: 与基于距离的聚类算法(如K-means)不同,DBSCAN不假设簇在空间中是圆形的,因此能识别任意形状的簇。
簇大小不均: DBSCAN可以发现大小差异较大的簇,而不会像K-means那样倾向于发现大小相近的簇。
数据维度不高: 虽然DBSCAN可以应对多维数据,但当数据维度增加时,寻找合适的eps值变得困难,且“维度的诅咒”可能导致算法效率降低。
最佳方法
为了最大化DBSCAN算法的效果,建议遵循以下方法:
参数选择: 仔细选择eps和min_samples参数。使用领域知识和参数搜索技术,如网格搜索配合轮廓系数,来确定最佳参数。
数据预处理: 标准化数据以确保所有特征按相同的标准衡量,这对于基于距离的算法尤为重要。
维度选择: 对于高维数据,考虑使用PCA或其他降维技术以减少维度的诅咒影响。
可视化: 在可能的情况下,使用可视化工具来评估聚类效果。对于高维数据,可以使用t-SNE等降维可视化技术。
密度估计: 在确定eps之前,使用KNN(K-Nearest Neighbors)距离图来估计数据的密度分布。
算法变体: 对于特定类型的数据集,可以考虑使用DBSCAN的变体,例如HDBSCAN,它对参数选择不那么敏感,能够自适应地确定eps值。
并行处理: 针对大型数据集,利用DBSCAN的并行实现或近似算法来加速处理。
遵循这些最佳实践,我们将能够更有效地应用DBSCAN算法,以解决实际的聚类问题。
六、总结
通过对DBSCAN聚类算法的深入探讨,我们不仅理解了其理论基础、核心参数和算法流程,而且通过实际案例实战了解了如何在实践中应用这一强大的工具。此外,我们还探讨了DBSCAN的最佳实践,为数据科学家提供了关于如何在各种情境中使用DBSCAN的实用建议。
在技术领域,DBSCAN的独特之处在于它对数据集中的簇形状和大小没有固定的假设,这让它在处理现实世界复杂数据时显得尤为重要。与此同时,DBSCAN提供了对噪声和异常值具有内在抵抗力的优点,这是许多其他聚类算法所不具备的。
不过,DBSCAN也不是万能的。在高维空间中,它的表现可能会因为距离度量变得不太可靠而大打折扣,这是所谓的“维度的诅咒”。另外,参数eps和min_samples的选择对算法的结果影响巨大,但这也提供了一个利用领域知识深入数据挖掘的机会。
从技术洞见的角度来看,DBSCAN的深度和灵活性提示我们在面对任何一种算法时,都不应仅仅关注其表面的应用,而应深究其背后的原理和假设。理解这些可以帮助我们更好地调整算法以适应特定的问题,从而解锁数据的真正潜力。
在人工智能和机器学习的迅猛发展中,聚类算法如DBSCAN是我们工具箱中的重要工具。通过本文的学习,读者应能够在理解其深度的同时,将这一工具应用于现实世界的问题,以及在未来的工作中进行进一步的探索和创新。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!