VL53L5CX驱动开发(5)----运动阈值检测
VL53L5CX驱动开发----5.运动阈值检测
概述
本章目的是展示如何充分利用VL53L5CX传感器的高级特性,通过结合运动指示器和阈值检测功能,实现对特定场景的精确监控。首先,程序通过特定的配置,确保了传感器能够在特定的分辨率下工作,同时还可调整用于检测运动的最小和最大距离。其次,一旦在传感器的视野中检测到运动,并且该运动的强度超出了预先设置的阈值,那么这种情况将被认为是一个有效的运动事件。最后,该程序不仅会捕获这些事件,还会详细地显示相关的数据,如运动发生在哪个区域,以及运动的强度如何。这种结合使用多种功能的方法,使得VL53L5CX传感器在各种应用场景中都能提供高效、准确的运动检测结果。
最近在弄ST的课程,需要样片的可以加群申请:615061293 。
视频教学
https://www.bilibili.com/video/BV1Lj411x7Sg/
VL53L5CX驱动开发(4)----运动指示器
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
源码下载
https://download.csdn.net/download/qq_24312945/88431356
生成STM32CUBEMX
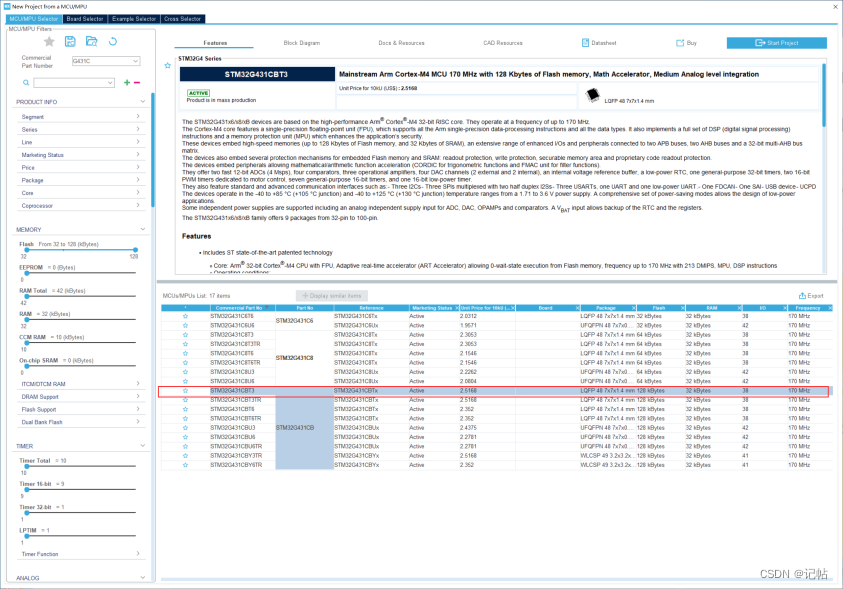
选择MCU
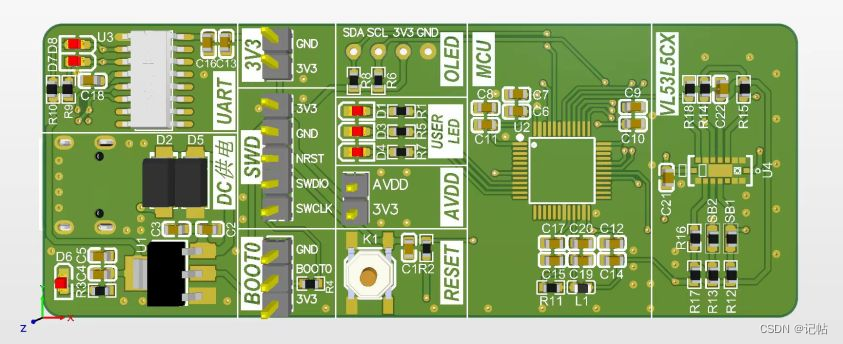
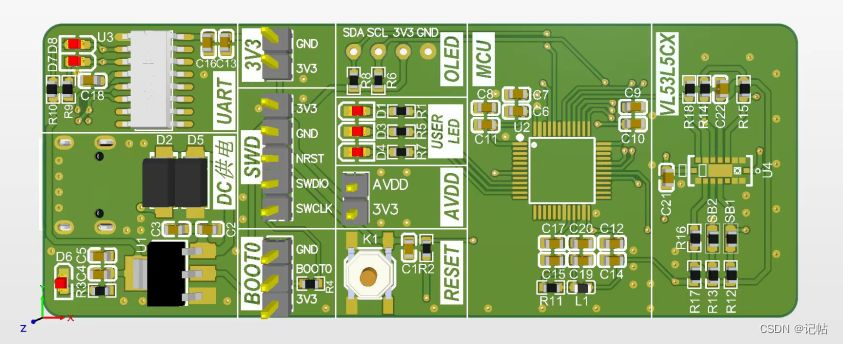
测试版所用的MCU为STM32G431CB。
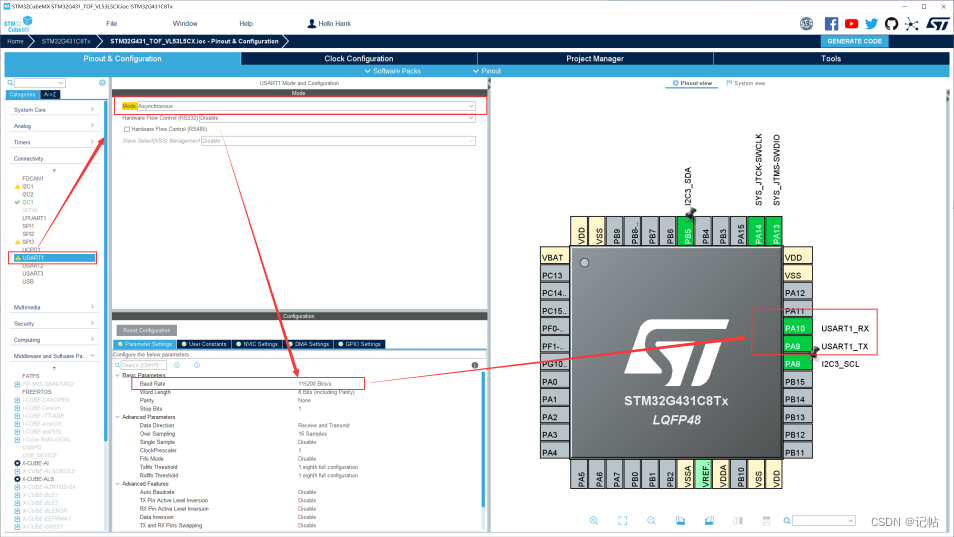
串口配置
查看原理图,PA9和PA10设置为开发板的串口。
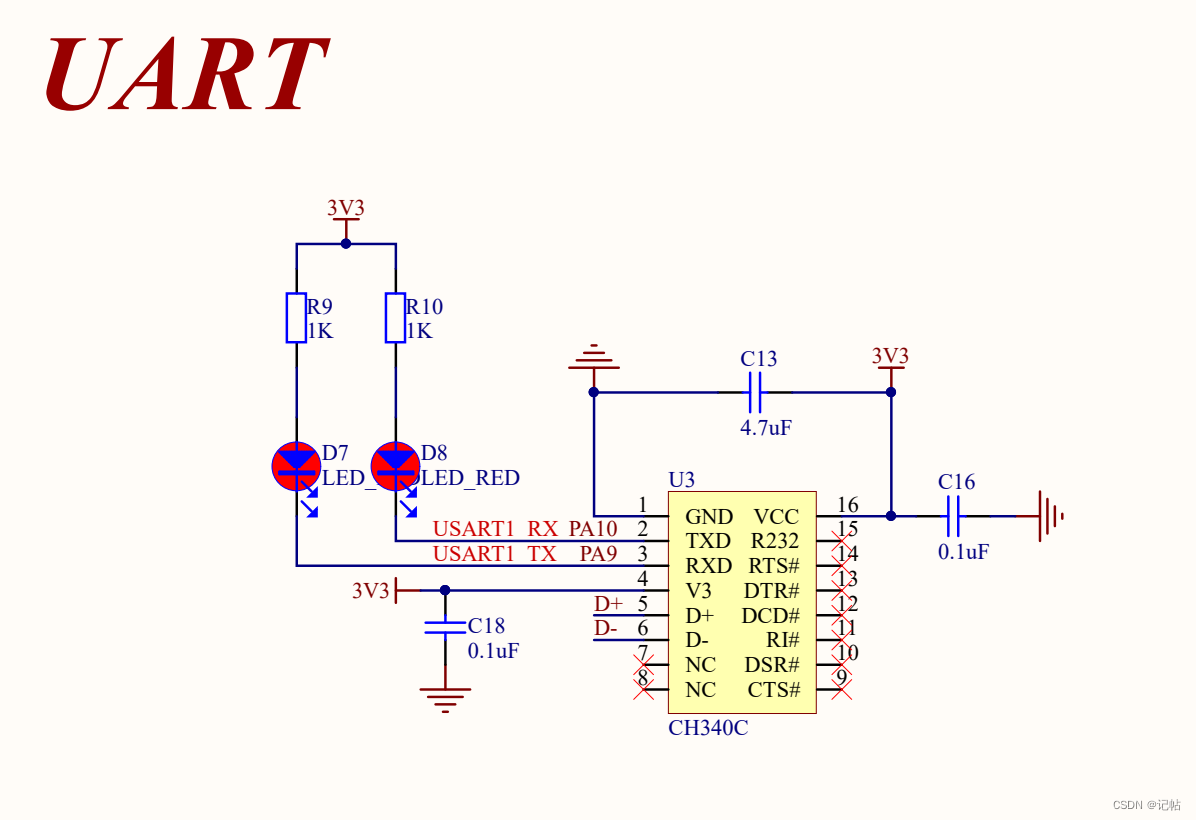
配置串口。
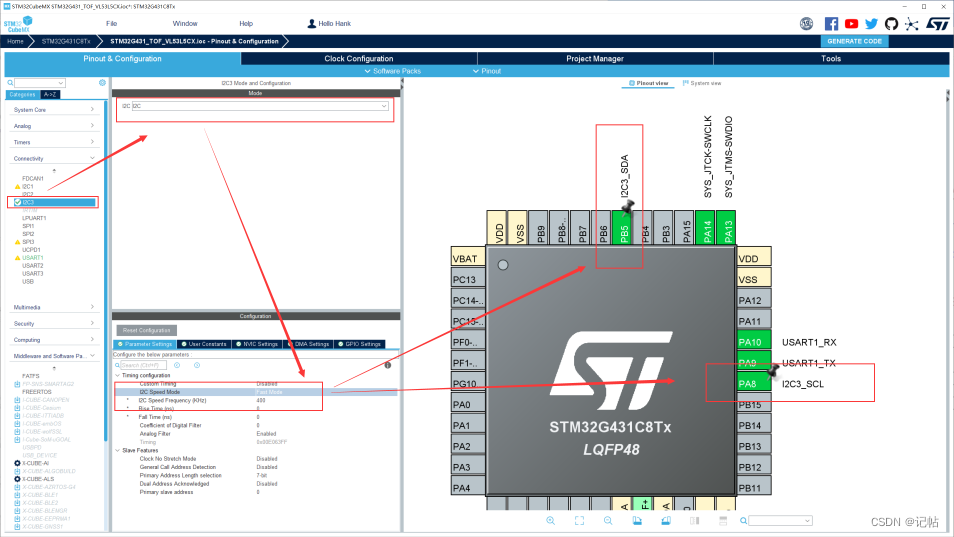
IIC配置
在这个应用中,VL53L5CX模块通过I2C(IIC)接口与主控器通信。具体来说,VL53L5CX模块的I2C引脚连接到主控器的PA8和PB5两个IO口。
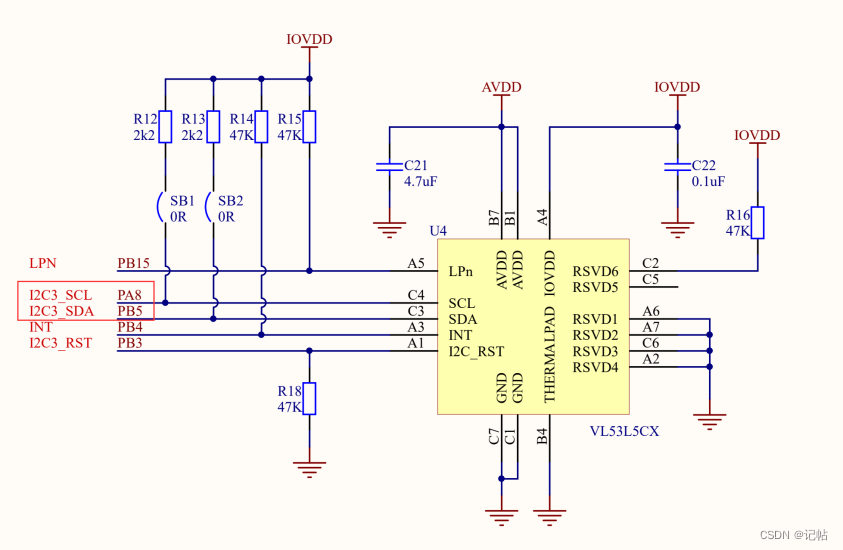
配置IIC为快速模式,速度为400k。
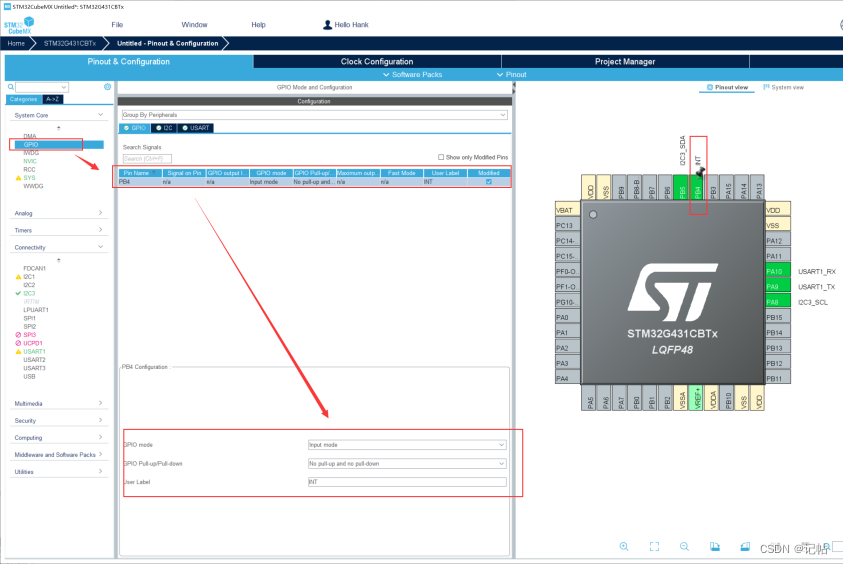
INT设置
自主模式可以通过获取INT管脚进行判断数据是否准备好。
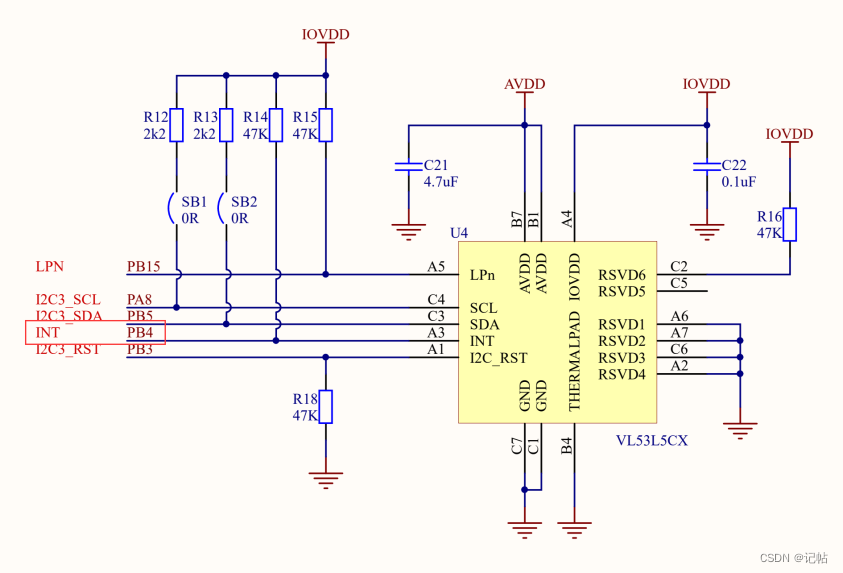
配置PB4为输入模式。
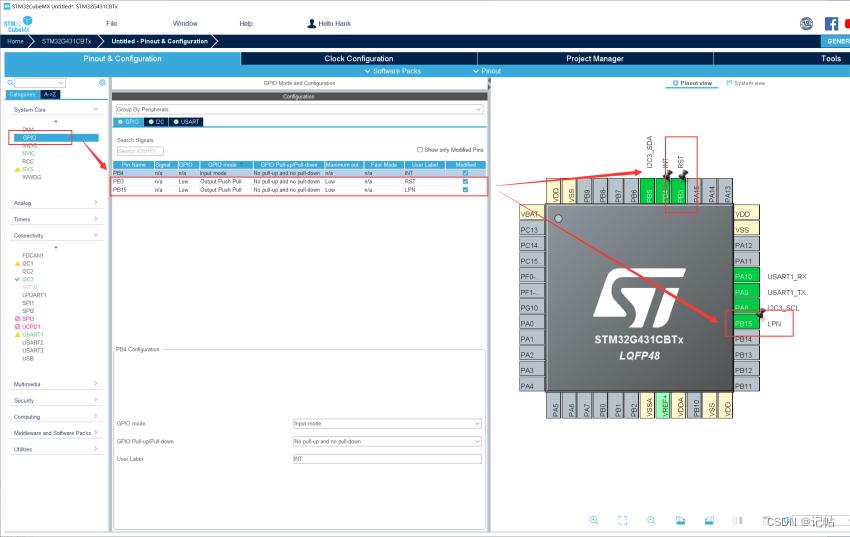
配置使能与复位
驱动中有对模块进行复位的操作。
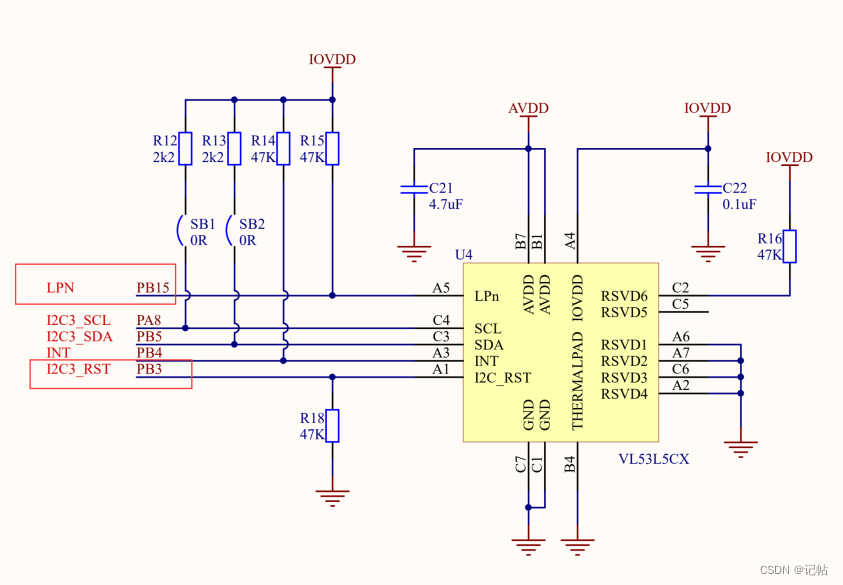
配置PB15和PB3为输出管脚。
X-CUBE-TOF1
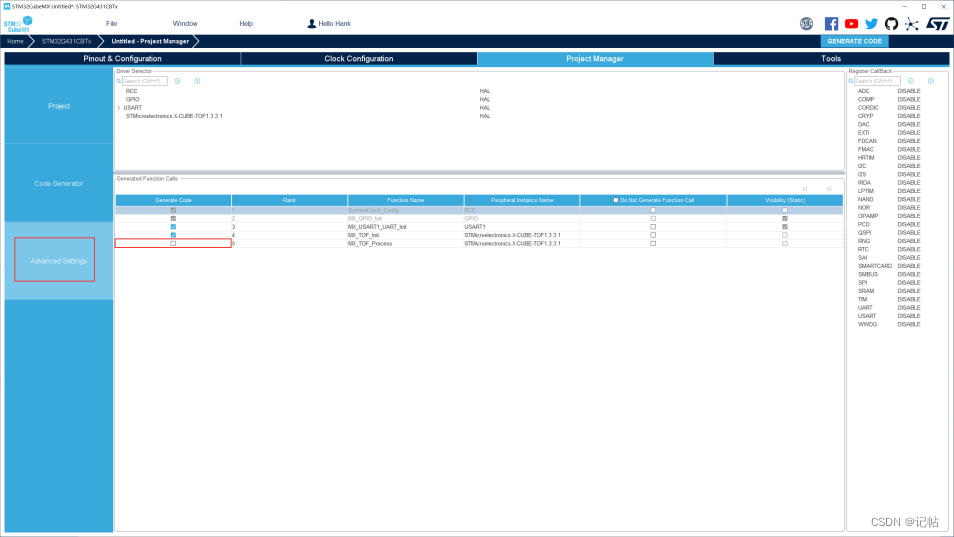
本节介绍在不需要使用样例应用时如何使用STM32CubeMX将X-CUBE-TOF1软件包添加到项目中。有了这样的设置,就只配置了驱动层。
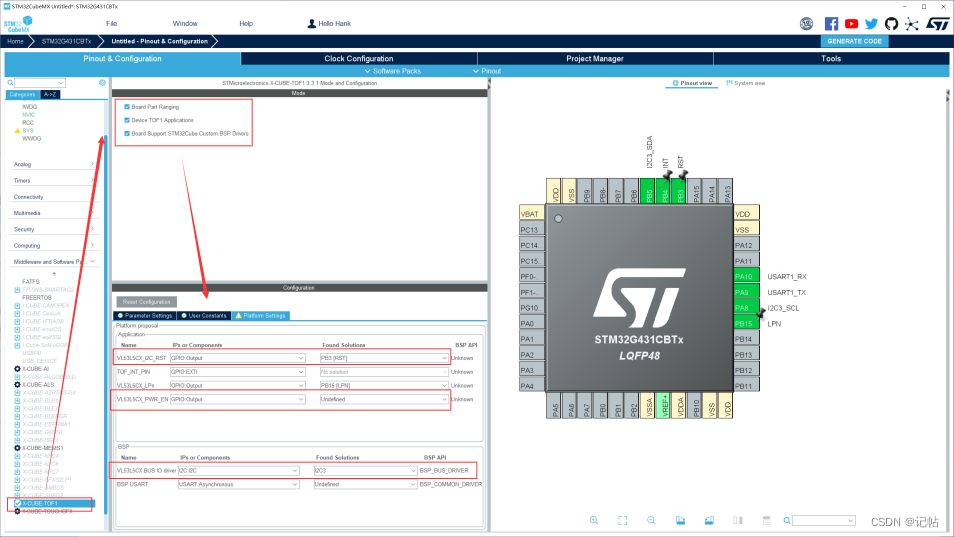
由于需要自主模式,所以可以不开启主程序TOF执行代码。
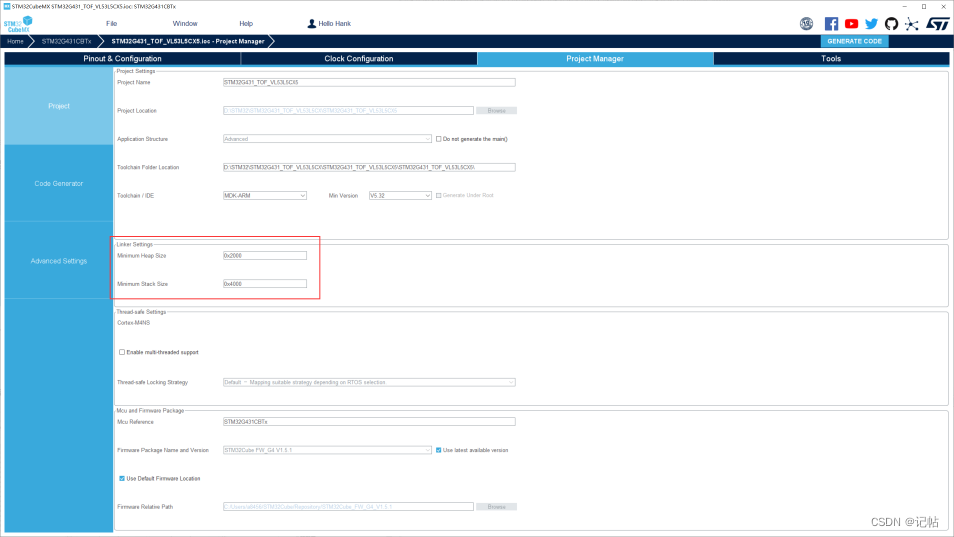
修改堆栈大小。
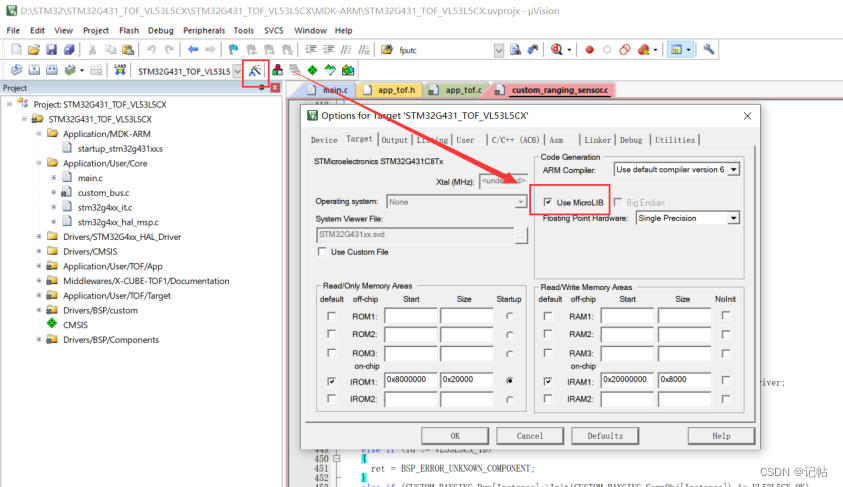
串口重定向
打开魔术棒,勾选MicroLIB
在main.c中,添加头文件,若不添加会出现 identifier “FILE” is undefined报错。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
函数声明和串口重定向:
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END PFP */
代码配置
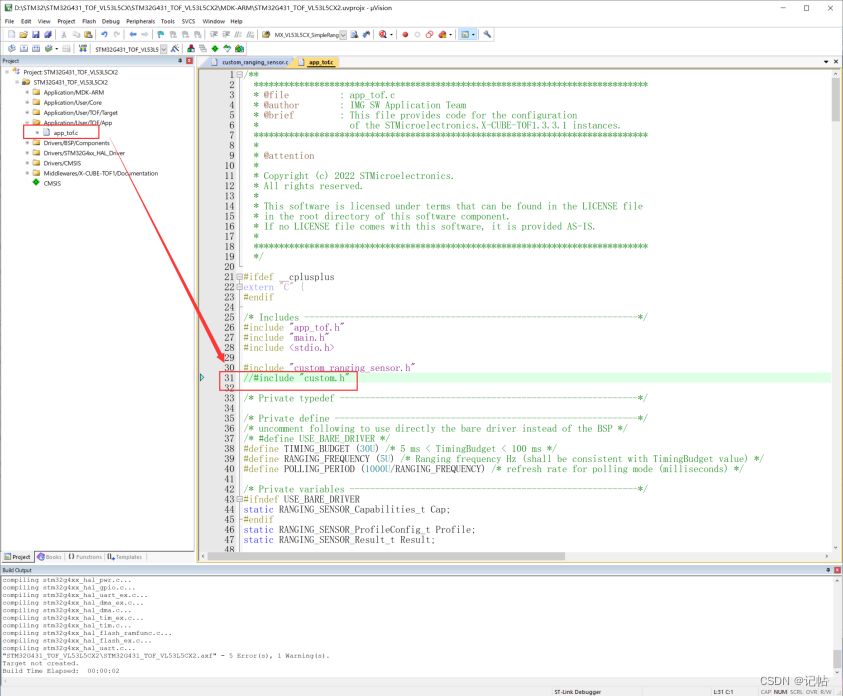
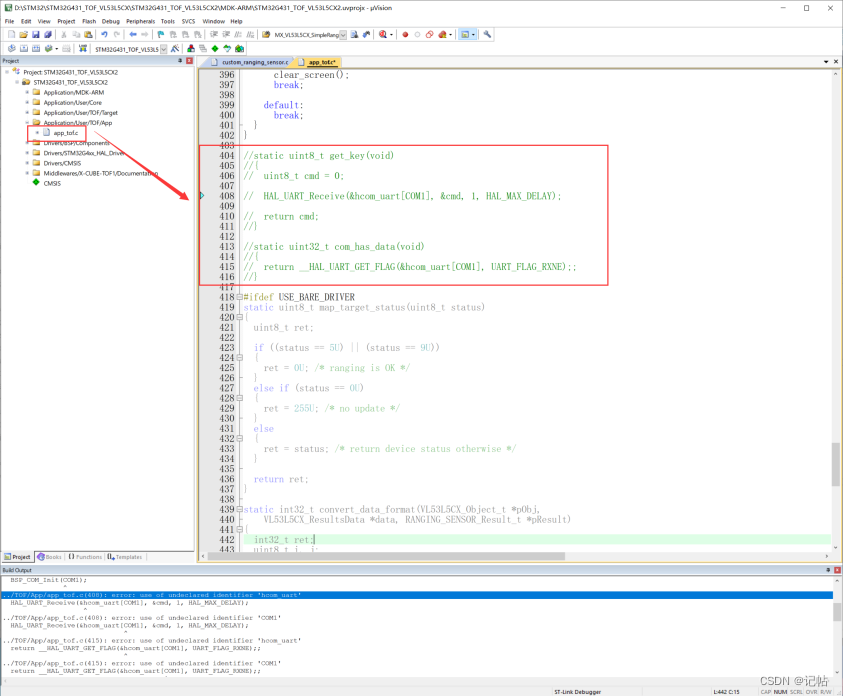
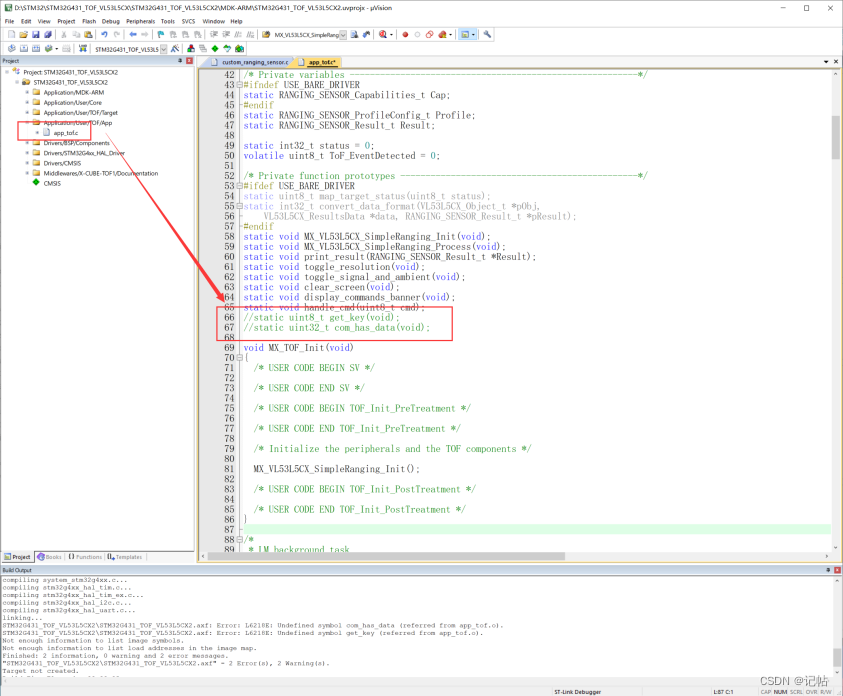
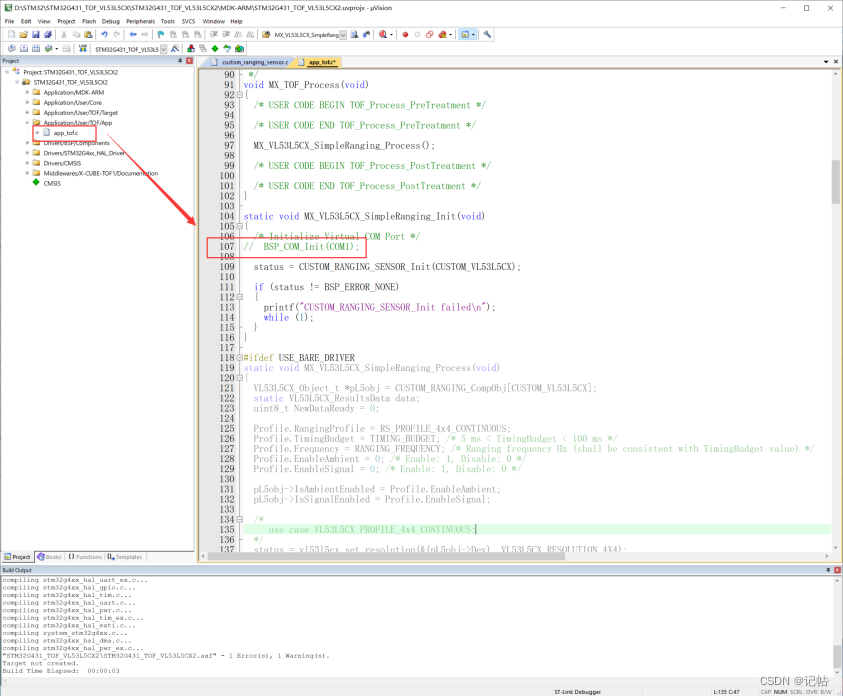
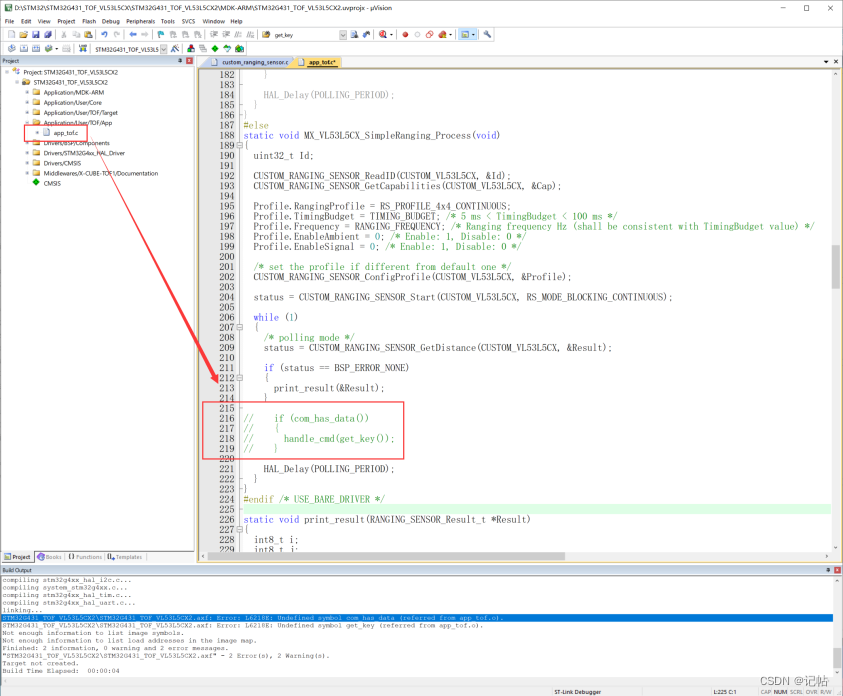
在custom_ranging_sensor.c代码中,有IO口驱动VL53L5CX进行复位的代码,由于没有配置对应的IO,所以需要注释掉。
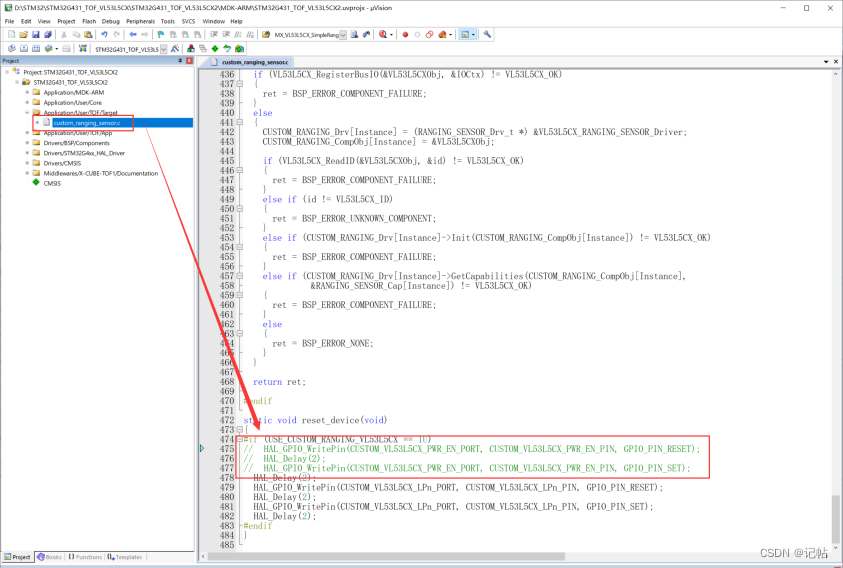
由于没加载串口定义,所以注释掉#include “custom.h”
检测流程
- 初始化变量:
○ 创建相关变量,如状态(status)、运动配置(motion_config)、设备对象(pL5obj)和结果数据(Results)。 - 配置运动指示器:
○ 使用8x8的分辨率初始化运动指示器。
○ 设置用于检测运动的最小和最大距离(在这里,是设置为1000mm到2000mm)。
○ 如果用户需要改变分辨率,他也需要更新运动指示器的分辨率(代码中此部分被注释掉了)。 - 设备配置:
○ 设置设备的分辨率为8x8。
○ 将设备设置为自主测距模式。
○ 设置测距频率为2Hz。
○ 设置集成时间为10ms以降低功耗。 - 配置检测阈值:
○ 对于8x8的分辨率,我们希望每个区域有一个阈值。
○ 初始化阈值数组。
○ 为所有64个区域设置阈值,当运动指示器的值超过44时,将其视为运动。
○ 将阈值数组发送到传感器。
○ 启用检测阈值。 - 开始测距:
○ 启动传感器的测距功能。
○ 输出消息,等待在1m到2m之间的视野中有运动发生。 - 无限循环监测:
○ 不断检查数据是否准备好。
○ 如果数据准备好或者某个特定的GPIO引脚被按下,获取测距数据。
○ 因为传感器默认设置为8x8模式,所以有64个区域要打印。但这个例子中,只打印首个区域的数据。
○ 如果某个区域的运动指示器的值大于或等于44,打印该区域有运动发生的消息。
通过上述流程,该程序能够检测并显示在预定距离范围内、运动强度超过预定阈值的运动情况。
TOF代码配置
在main.c中添加对应头文件。
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "custom_ranging_sensor.h"
#include "vl53l5cx_plugin_motion_indicator.h"
/* USER CODE END Includes */
函数与变量定义:
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END PFP */
添加TOF初始化。
/* USER CODE BEGIN 2 */
uint8_t status, isReady, i;
VL53L5CX_Motion_Configuration motion_config; /* 运动配置 */
VL53L5CX_Object_t *pL5obj = CUSTOM_RANGING_CompObj[CUSTOM_VL53L5CX];
VL53L5CX_ResultsData Results; /* 来自VL53L5CX的结果数据 */
/*********************************/
/* 配置运动指示器 */
/*********************************/
/* 使用4x4分辨率初始化运动指示器 */
status = vl53l5cx_motion_indicator_init(&pL5obj->Dev, &motion_config, VL53L5CX_RESOLUTION_8X8);
if(status)
{
printf("运动指示器初始化失败,状态码 : %u\n", status);
return status;
}
/* (可选) 设置用于检测运动的最小和最大距离。注意距离的限制 */
status = vl53l5cx_motion_indicator_set_distance_motion(&pL5obj->Dev, &motion_config, 1000, 2000);
if(status)
{
printf("设置运动检测距离失败,状态码 : %u\n", status);
return status;
}
/* 如果用户需要更改分辨率,则也需要更新运动指示器的分辨率(此部分已注释) */
//status = vl53l5cx_set_resolution(&Dev, VL53L5CX_RESOLUTION_4X4);
//status = vl53l5cx_motion_indicator_set_resolution(&Dev, &motion_config, VL53L5CX_RESOLUTION_4X4);
/* 将设备设置为自主模式,并设置较小的集成时间以降低功耗 */
status = vl53l5cx_set_resolution(&pL5obj->Dev, VL53L5CX_RESOLUTION_8X8);
status = vl53l5cx_set_ranging_mode(&pL5obj->Dev, VL53L5CX_RANGING_MODE_AUTONOMOUS);
status = vl53l5cx_set_ranging_frequency_hz(&pL5obj->Dev, 2);
status = vl53l5cx_set_integration_time_ms(&pL5obj->Dev, 10);
/*********************************/
/* 配置检测阈值 */
/*********************************/
/* 对于8x8的分辨率,我们希望为每个区域设置一个阈值 */
VL53L5CX_DetectionThresholds thresholds[VL53L5CX_NB_THRESHOLDS];
/* 将所有阈值设置为0 */
memset(&thresholds, 0, sizeof(thresholds));
/* 为所有64个区域设置阈值 */
for(i = 0; i < 64; i++){
thresholds[i].zone_num = i;
thresholds[i].measurement = VL53L5CX_MOTION_INDICATOR;
thresholds[i].type = VL53L5CX_GREATER_THAN_MAX_CHECKER;
thresholds[i].mathematic_operation = VL53L5CX_OPERATION_NONE;
/* 示例值44,超过此值的运动将被认为是移动 */
thresholds[i].param_low_thresh = 44;
thresholds[i].param_high_thresh = 44;
}
/* 明确标记最后一个阈值。因为我们有64个检查器,所以最后一个是第63个 */
thresholds[63].zone_num = VL53L5CX_LAST_THRESHOLD | thresholds[63].zone_num;
/* 将阈值数组发送到传感器 */
vl53l5cx_set_detection_thresholds(&pL5obj->Dev, thresholds);
/* 启用检测阈值 */
vl53l5cx_set_detection_thresholds_enable(&pL5obj->Dev, 1);
/* 开始测距 */
status = vl53l5cx_start_ranging(&pL5obj->Dev);
printf("等待在1m和2m之间的视场中发生的运动...\n");
/* USER CODE END 2 */
主程序
主程序来获取对应的isReady位状态来判定数据是否准备好或者判断INT的IO状态也可。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(HAL_GPIO_ReadPin ( GPIOB, GPIO_PIN_4) ==0)
// status = vl53l5cx_check_data_ready(&pL5obj->Dev, &isReady);
// if(isReady)
{
/* 获取测距数据 */
vl53l5cx_get_ranging_data(&pL5obj->Dev, &Results);
/* 默认情况下,传感器设置为8x8模式,因此我们有64个区域的数据。
但在此示例中,只打印了第一个区域的数据 */
for(i = 0; i < 64; i++)
{
if(Results.motion_indicator.motion[motion_config.map_id[i]] >= 44)
{
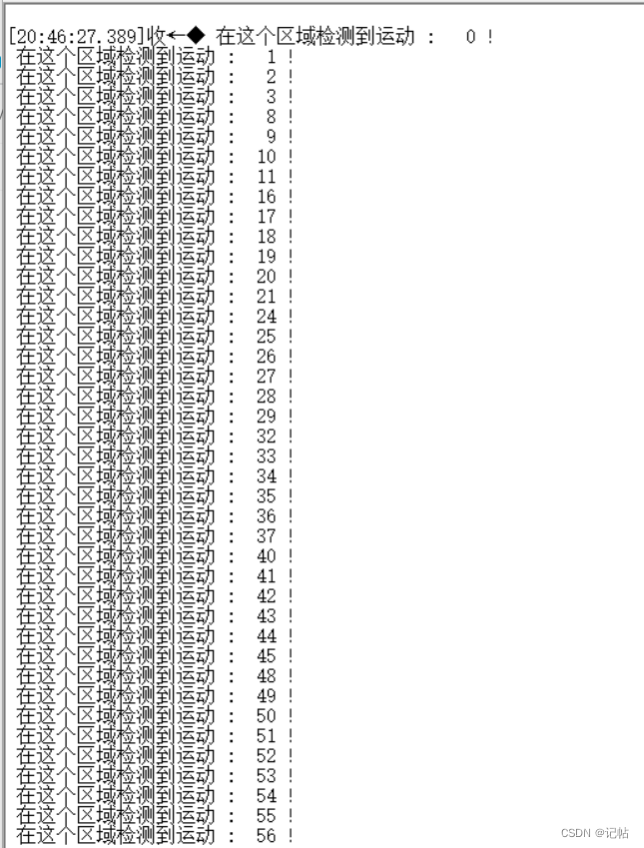
printf(" 在这个区域检测到运动 : %3d !\n", i);
}
}
printf("\n");
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 *
演示结果
检测运动情况下运动强度如下所示。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!