S7-1200/1500(T) 通过功能块FB38051实现 SINAMICS S200 的 EPOS 基本定位控制
?SINAMICS S200 PN 是西门子推出的新一代伺服驱动系统。SINAMICS S200 将与 SIMOTICS S-1FL2伺服电机、Motion Connect 350/380 电缆相结合,作为新型单轴 AC/AC 伺服系统,增强了西门子伺服驱动产品的竞争力并扩大了西门子在标准伺服市场的产品组合覆盖范围。它可以实现位置控制、速度控制和扭矩控制。
????????第三代伺服驱动系统?S200 内置的 EPOS 基本定位功能不仅支持 LU(长度单元),而且还支持物理单位。S200 伺服驱动系统支持新增的西门子报文 112,是32位浮点值的解决方案。并开发了新的 PLC 功能块 FB38051 用于 EPOS 基本定位功能控制,支持物理单位。
本文主要介绍如何使用 S7-1200/1500(T) PLC 连接 SINAMICS S200 PN 伺服驱动系统,通过 FB38051 功能块实现 S200 内置的 EPOS 基本定位控制功能。
????????示例项目使用 Startdrive 组态和调试 S200。适用于博途版本 V18 及以上并安装了 Startdrive V18 SP2 的软件系统。

2
项目配置示例
2.1使用的硬件及软件
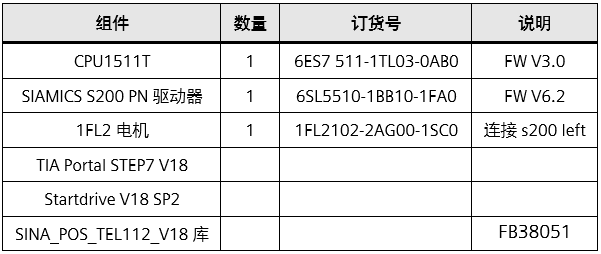
????????项目示例使用的硬件及软件如下表所示:
2.2创建博途项目的步骤
第一步 创建博途项目
-
添加 PLC
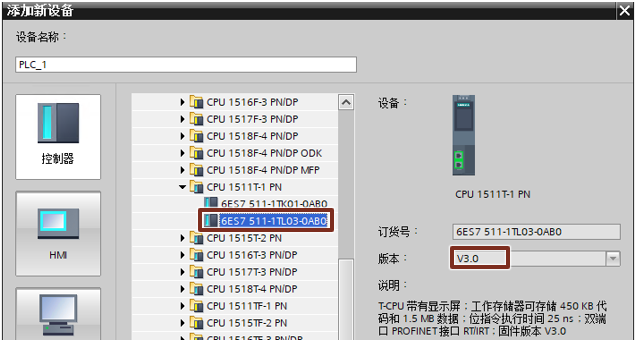
????????创建一个新的博途项目,项目名称“S200_EPOS(FB38051)“,添加 PLC。
-
在博途项目中添加 S200 PN
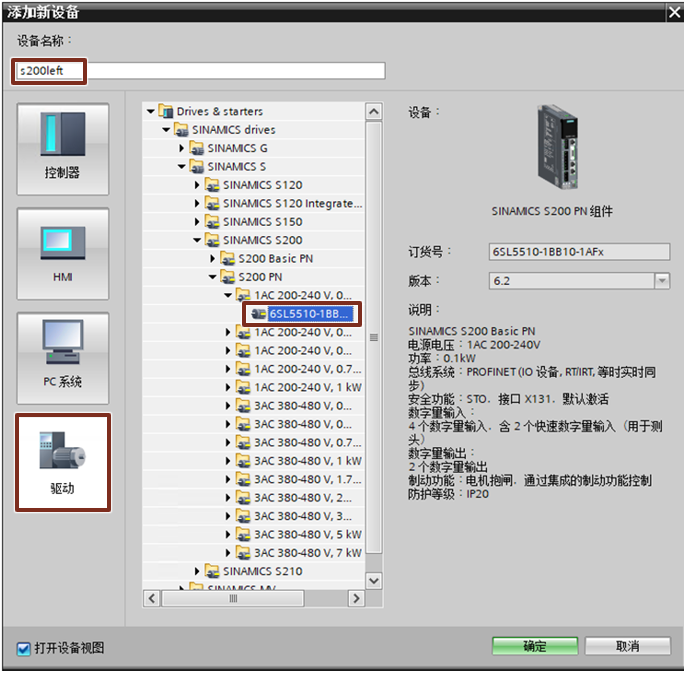
????????双击“添加新设备“,输入设备名称,选择项目中使用的驱动器订货号。
????????点击"继续使用低等级安全设置"。
????????本示例使用此设置,将禁用 UMAC 功能。如要设置 UMAC 安全,请点击 "配置安全设置"。

-
配置电机引文:博途工控人平时在哪里技术交流博途工控人社群
在设备视图中,点击 MOT 图标并进入属性界面。从电机–选择–1FL2列表中,选择连接到此驱动器的正确电机类型。

-
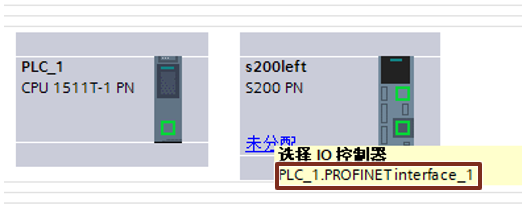
配置驱动器与 PLC 的网络连接????
????????连接并设置 s200left,为 s200left 选择 IO 控制器。
????????设置 s200left 的 IP 地址及设备名称

????????取消?S200 与 PLC 通信的等时同步模式
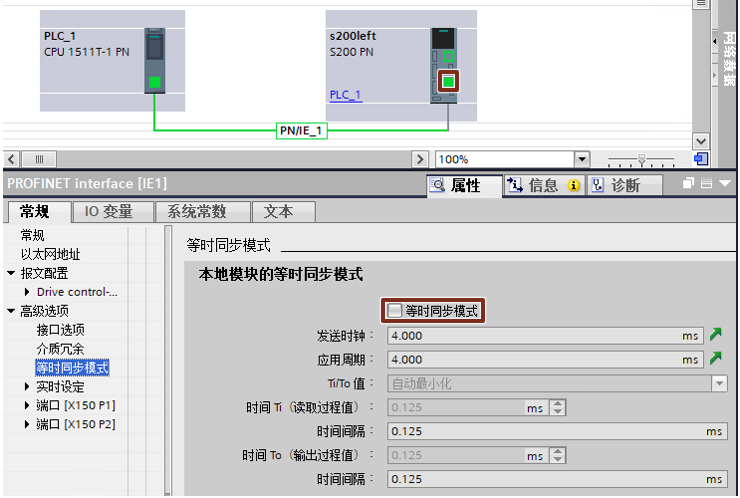
????????如下图所示,将同步 RT 等级设置为 “RT”

第二步 配置 S200 基本位置控制(EPOS)
????????执行“引导式快速设置”,在 Startdrive 中进行 S200 的基本位置控制设置。双击项目导航中的“引导式快速设置”。

-
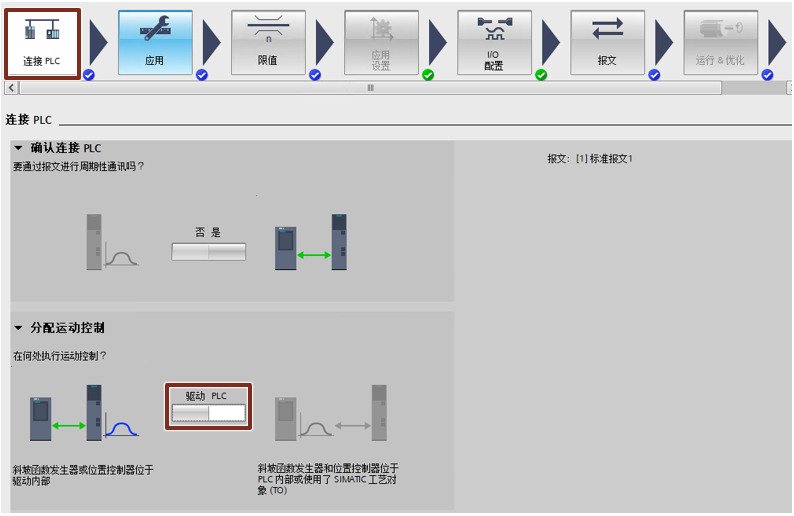
连接PLC
????????在“连接PLC”分配运动控制中,分配运动控制到驱动。
-
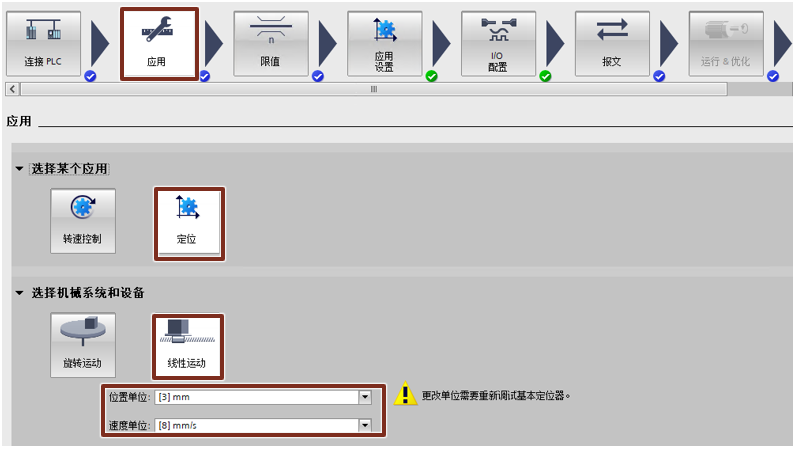
应用
????????选择应用,点击?“定位”。?选择机械系统和设备,机械系统可以选择?“旋转运动” 或 “线性运动”。位置单位及速度单位必须选择物理单位 (mm)?用于定位控制。
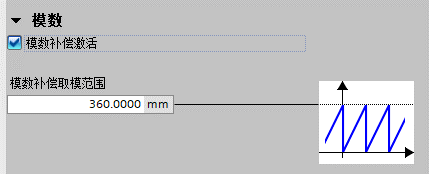
设置“电机转数”、“负载转数”和丝杠螺距
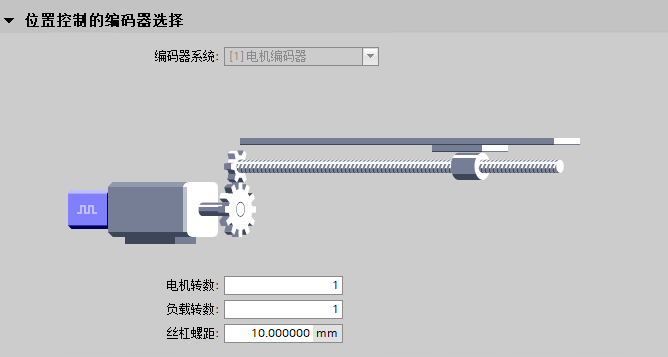
如果激活“模数补偿激活”,可以设置模数补偿模范围
-
限值
为应用定义限制值。设置动态响应限制。包括最大速度、最大加速度、最大减速度。
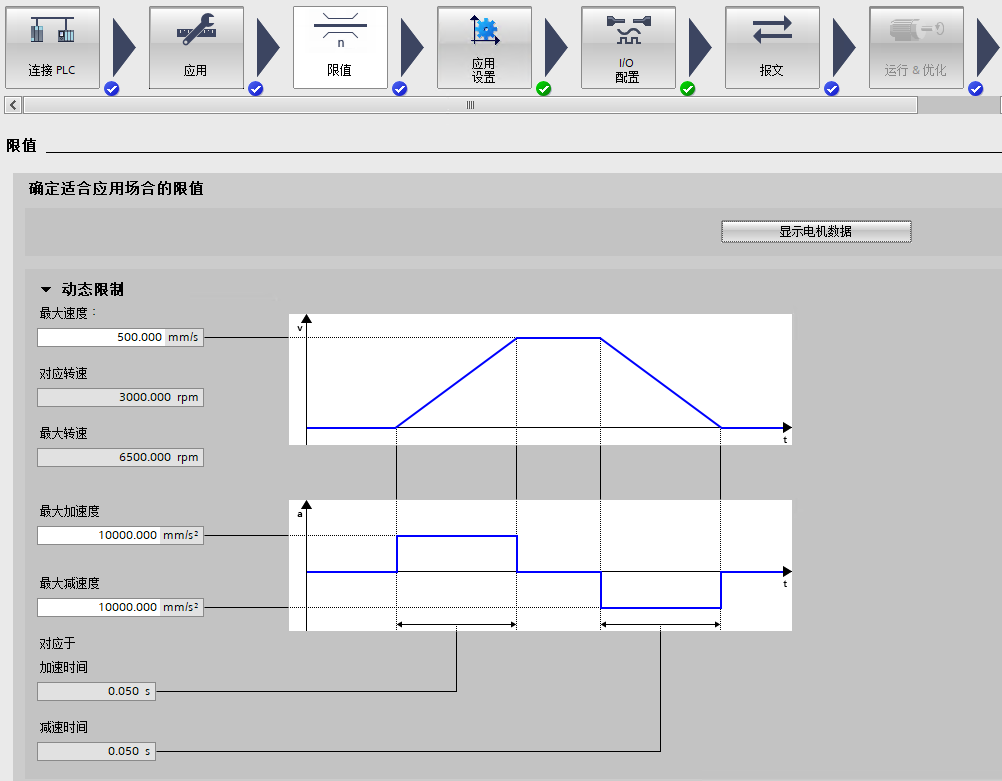
设置斜坡下降时间,包括 OFF1 斜坡下降时间和斜坡下降时间(OFF3)。

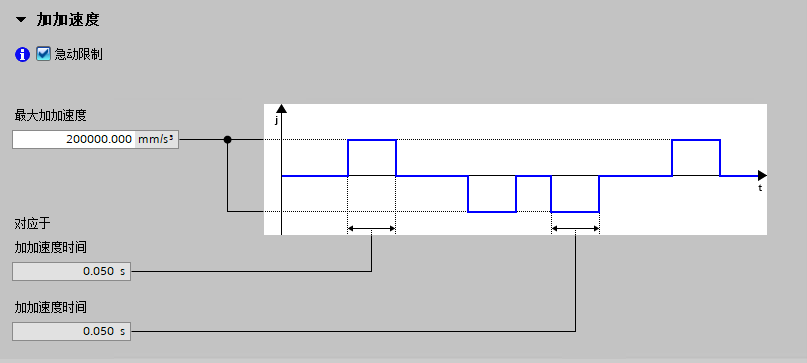
激活“急动限制”,并根据要求设置最大加速度。
-
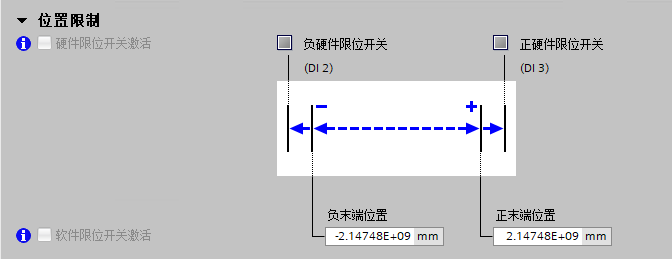
位置限制?
驱动器仅接受位于软件限位开关内的位置设定点。激活的软件限制开关通过指定 p2580(软件限位开关负)和 p2581(软件限位开关正)来限制位置设定值。
?使用 c2569(硬件限位开关,负)和 c2570(硬件限位开关,正)在驱动器上评估激活的硬件限位开关。当设备通过硬件限位开关时,驱动器以 OFF3 斜坡下降时间停止轴,并输出故障 F07491 或 F07492。要使轴回到有效的横向范围内,必须将轴从硬件限位开关处移开,例如,使用点动功能。
可通过 FB38051 功能块中的控制字来进行软件限位开关激活及硬件限位激活。
-
?应用设置
?在应用设置中,进行轴回参考点的相关参数设置。

????????回参考点重新建立驱动器中计算出的零点位置与机器零点之间的参照。回参考点是在轴绝对定位中正确显示位置的前提条件。电源掉电后,绝对值编码器保留其位置信息。驱动器提供了多种轴回参考点的方式包括:主动回参考点、被动回参考点以及设置参考点位置。
绝对值编码器调整在“应用设置”中,本示例选择主动回零模式,回零完成后可对绝对编码器进行校准。
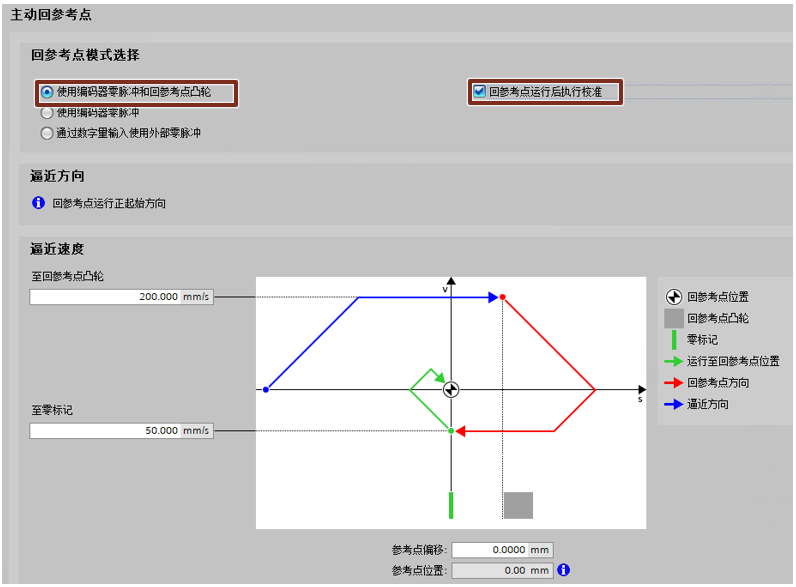
????????绝对编码器调整。仅在使用带有绝对编码器的伺服电机时可用。只需要进行一次绝对值编码器的校准,然后即使在设备掉电后也可以保持校准值。S200在线时,可以通过单击“设定”按钮来校准绝对值编码器。

-
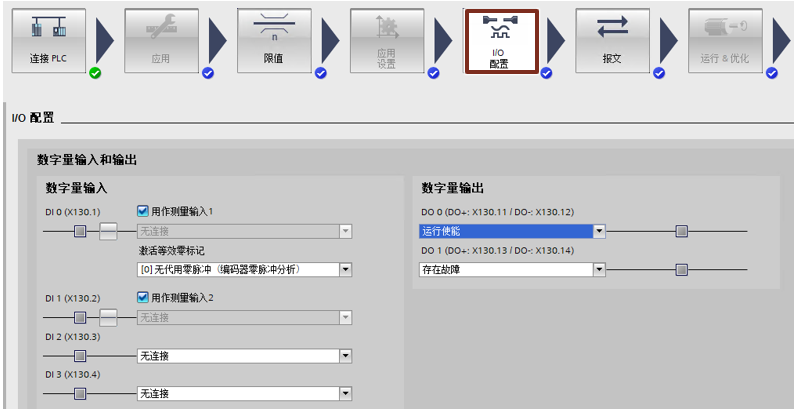
I/O配置
在“I/O 配置”中,可进行驱动器数字量输入及数字量输出功能的基本设置。
-
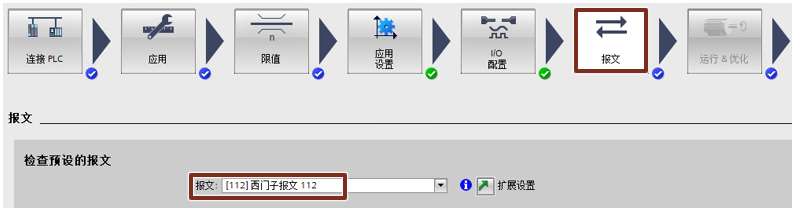
报文
设置驱动的控制报文,本例选用西门子报文112,之后点击“下一步”。
-
执行配置下载
???????点击“执行下载”按钮,下载驱动的配置数据。之后在线驱动后进入到“运行&优化“,通过控制面板运测试驱的运行是否正常并对其进行一键优化。

第三步?使用 FB38051 功能块实现 EPOS 控制
扫描下方二维码下载库及说明文档
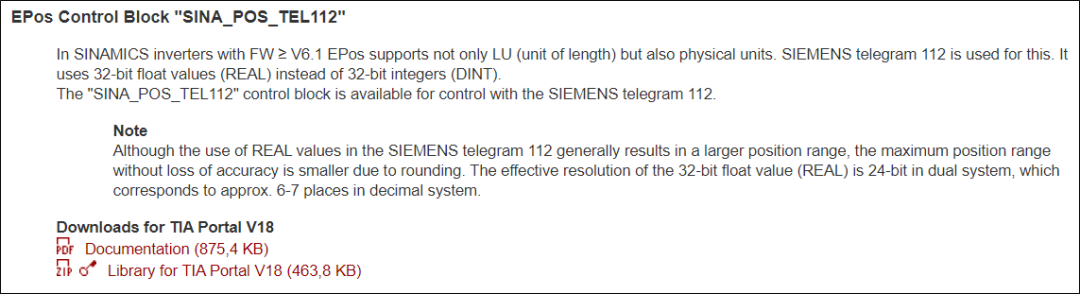
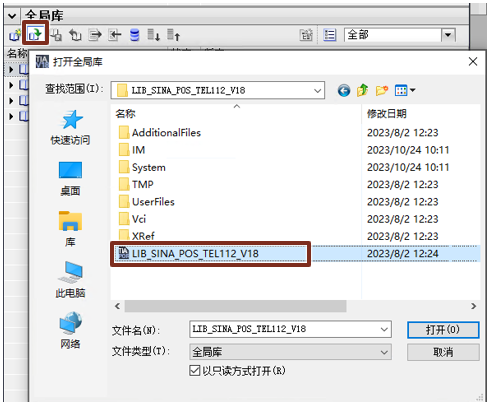
解压缩下载的库文件后,在博途项目中导入库。
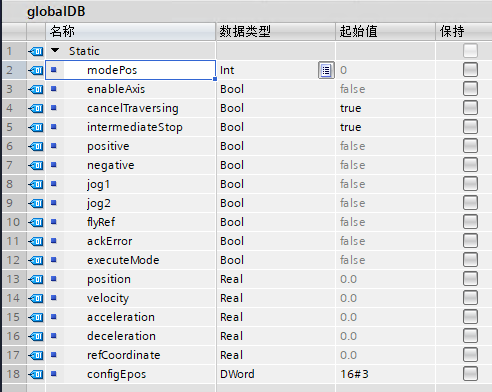
使用以下变量创建数据块,用于 FB38051 功能块调用的赋值。
在OB1中调用?“SINA_POS_TEL112”?功能块。
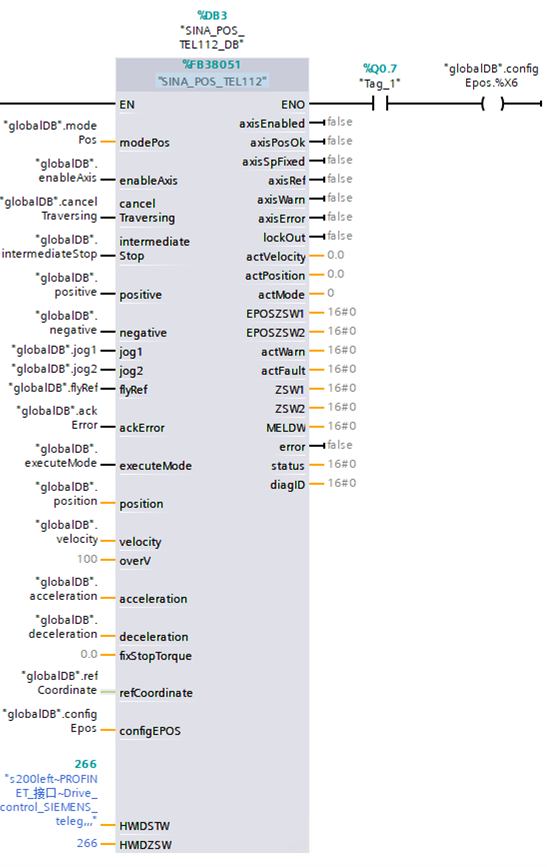
????????该功能块的输入/输出参数及功能的详细描述可参看下载的说明文档,并按照文档描述进行回零、相对定位、绝对定位、点动等控制操作。引文:博途工控人平时在哪里技术交流博途工控人社群
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!