ros2 基础学习14-- Launch:多节点启动与配置脚本
到目前为止,每当我们运行一个ROS节点,都需要打开一个新的终端运行一个命令。机器人系统中节点很多,每次都这样启动好麻烦呀。
有没有一种方式可以一次性启动所有节点呢?答案当然是肯定的,那就是Launch启动文件,它是ROS系统中多节点启动与配置的一种脚本。
Launch文件示例

这是一个完整的Launch文件,乍看上去,好像Python代码呀,没错,ROS2中的Launch文件就是基于Python描述的。
Launch的核心目的是启动节点,我们在命令行中输入的各种参数,在Launch文件中,通过类似这样的很多代码模版,也可以进行配置,甚至还可以使用Python原有的编程功能,大大丰富了启动过程中的多样化配置。
Launch文件在ROS系统中出现的频次相当之高,它就像粘合剂一样,可以自由组装和配置各个节点,那如何编写或者阅读一个Launch文件呢,我们通过一系列例程带领大家来了解。
多节点启动
启动终端,使用ros2中的launch命令来启动第一个launch文件示例:
ros2 launch learning_launch simple.launch.py
运行成功后,就可以在终端中看到发布者和订阅者两个节点的日志信息啦。

文件解析
这两个节点是如何启动的呢?我们来分析下这个launch文件。
learning_launch/simple.launch.py
from launch import LaunchDescription # launch文件的描述类
from launch_ros.actions import Node # 节点启动的描述类
def generate_launch_description(): # 自动生成launch文件的函数
return LaunchDescription([ # 返回launch文件的描述信息
Node( # 配置一个节点的启动
package='learning_topic', # 节点所在的功能包
executable='topic_helloworld_pub', # 节点的可执行文件
),
Node( # 配置一个节点的启动
package='learning_topic', # 节点所在的功能包
executable='topic_helloworld_sub', # 节点的可执行文件名
),
])
命令行参数配置
我们使用ros2命令在终端中启动节点时,还可以在命令后配置一些传入程序的参数,使用launch文件一样可以做到。
我们使用ros2命令在终端中启动节点时,还可以在命令后配置一些传入程序的参数,使用launch文件一样可以做到。
运行效果
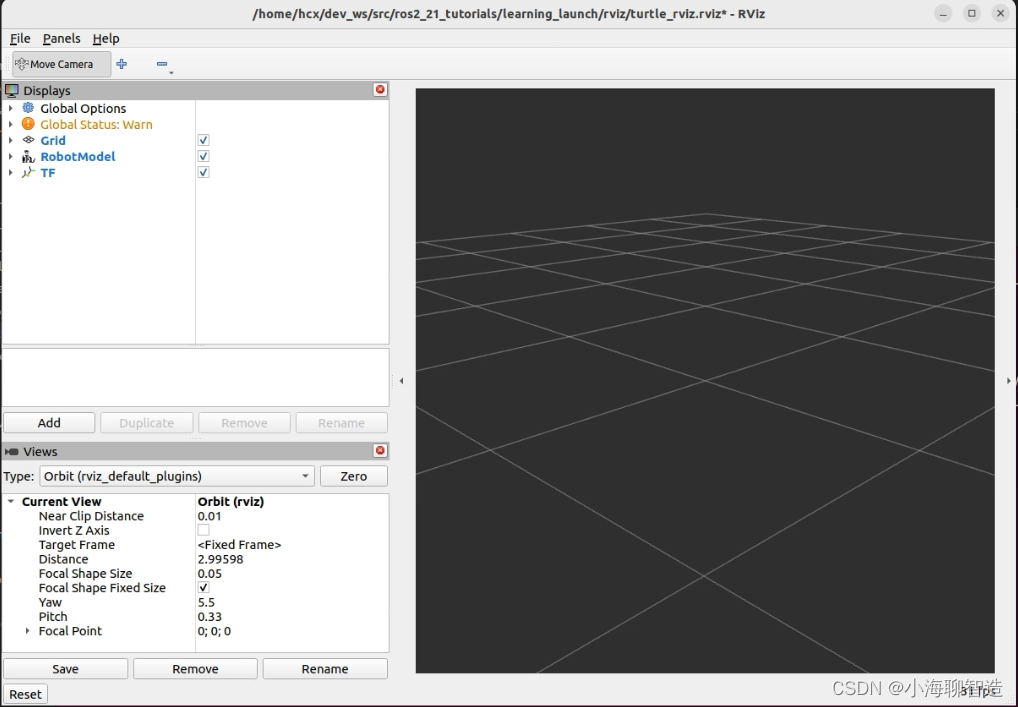
比如我们想要运行一个Rviz可视化上位机,并且加载某一个配置文件,使用命令行的话,是这样的:
ros2 run rviz2 rviz2 -d <PACKAGE-PATH>/rviz/turtle_rviz.rviz
命令后边还得跟一长串配置文件的路径,如果放在launch文件里,启动就优雅很多了:
ros2 launch learning_launch rviz.launch.py
文件解析
命令行后边的参数是如何通过launch传入节点的呢?来看下这个launch文件。
learning_launch/rviz.launch.py
import osfrom ament_index_python.packages
import get_package_share_directory # 查询功能包路径的方法
from launch import LaunchDescription # launch文件的描述类
from launch_ros.actions import Node # 节点启动的描述类
def generate_launch_description(): # 自动生成launch文件的函数
rviz_config = os.path.join( # 找到配置文件的完整路径
get_package_share_directory('learning_launch'), 'rviz', 'turtle_rviz.rviz' )
return LaunchDescription([ # 返回launch文件的描述信息
Node( # 配置一个节点的启动
package='rviz2', # 节点所在的功能包
executable='rviz2', # 节点的可执行文件名
name='rviz2', # 对节点重新命名
arguments=['-d', rviz_config] # 加载命令行参数
)
])
资源重映射
ROS社区中的资源非常多,当我们使用别人代码的时候,经常会发现通信的话题名称不太符合我们的要求,能否对类似的资源重新命名呢?
为了提高软件的复用性,ROS提供了资源重映射的机制,可以帮助我们解决类似的问题。
运行效果
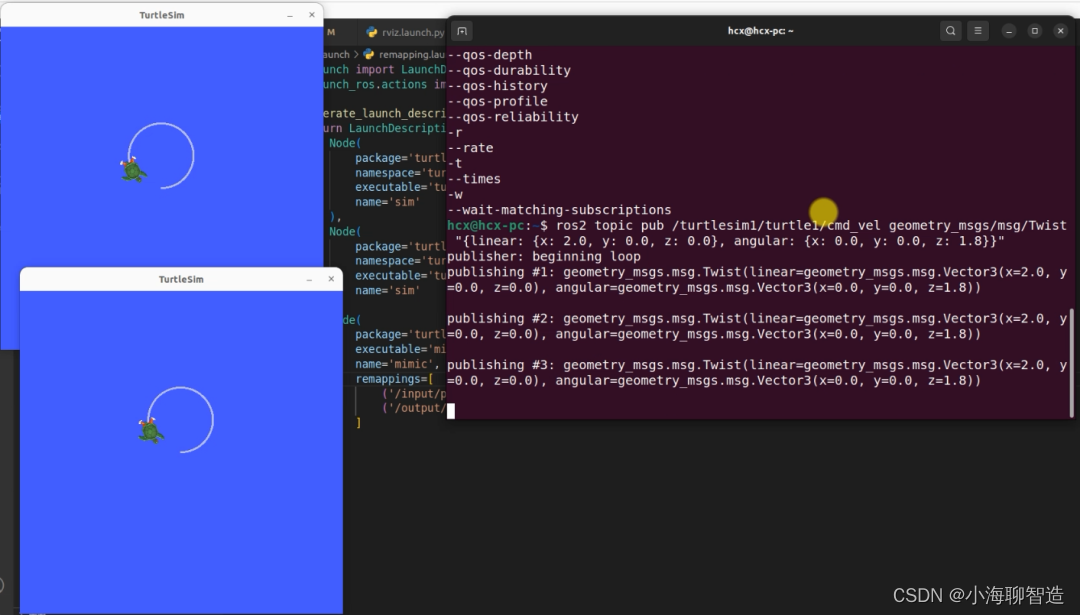
启动一个终端,运行如下例程,很快会看到出现了两个小海龟仿真器界面;再打开一个终端,发布如下话题,让海龟1动起来,海龟2也会一起运动:
ros2 launch learning_launch rviz.launch.py$ ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
文件解析
为什么两个海龟都会动呢?这里要用到turtlesim功能包里另外一个节点,叫做mimic,它的功能是订阅某一个海龟的Pose位置,通过计算,变换成一个同样运动的速度指令,发布出去。
至于mimic节点订阅或者发布的话题名叫什么呢?我们就可以通过重映射修改成对应任意海龟的名字。
learning_launch/remapping.launch.py
from launch import LaunchDescription # launch文件的描述类
from launch_ros.actions import Node # 节点启动的描述类
def generate_launch_description(): # 自动生成launch文件的函数
return LaunchDescription([ # 返回launch文件的描述信息
Node( # 配置一个节点的启动
package='turtlesim', # 节点所在的功能包
namespace='turtlesim1', # 节点所在的命名空间
executable='turtlesim_node', # 节点的可执行文件名
name='sim' # 对节点重新命名
),
Node( # 配置一个节点的启动
package='turtlesim', # 节点所在的功能包
namespace='turtlesim2', # 节点所在的命名空间
executable='turtlesim_node', # 节点的可执行文件名
name='sim' # 对节点重新命名
),
Node( # 配置一个节点的启动
package='turtlesim', # 节点所在的功能包
executable='mimic', # 节点的可执行文件名
name='mimic', # 对节点重新命名
remappings=[ # 资源重映射列表
('/input/pose', '/turtlesim1/turtle1/pose'), # 将/input/pose话题名修改为/turtlesim1/turtle1/pose
('/output/cmd_vel', '/turtlesim2/turtle1/cmd_vel'), # 将/output/cmd_vel话题名修改为/turtlesim2/turtle1/cmd_vel
]
)
])
ROS在Launch文件中参数设置
ROS系统中的参数,也可以在Launch文件中设置。
运行效果
启动一个终端,运行如下命令:
ros2 launch learning_launch parameters.launch.py
在启动的海龟仿真器中,我们看到背景颜色被改变了,这个颜色参数的设置就是在launch文件中完成的。

文件解析
我们看下在launch文件中如何来设置参数的。
learning_launch/parameters.launch.py
from launch import LaunchDescription # launch文件的描述类
from launch.actions import DeclareLaunchArgument # 声明launch文件内使用的Argument类
from launch.substitutions import LaunchConfiguration, TextSubstitutionfrom launch_ros.actions
import Node # 节点启动的描述类
def generate_launch_description(): # 自动生成launch文件的函数
background_r_launch_arg = DeclareLaunchArgument(
'background_r', default_value=TextSubstitution(text='0') # 创建一个Launch文件内参数
(arg)background_r )
background_g_launch_arg = DeclareLaunchArgument(
'background_g', default_value=TextSubstitution(text='84') # 创建一个Launch文件内参数
(arg)background_g )
background_b_launch_arg = DeclareLaunchArgument(
'background_b', default_value=TextSubstitution(text='122')
# 创建一个Launch文件内参数(arg)background_b )
return LaunchDescription([ # 返回launch文件的描述信息
background_r_launch_arg, # 调用以上创建的参数(arg)
background_g_launch_arg,
background_b_launch_arg,
Node( # 配置一个节点的启动
package='turtlesim',
executable='turtlesim_node', # 节点所在的功能包
name='sim', # 对节点重新命名
parameters=[{ # ROS参数列表
'background_r': LaunchConfiguration('background_r'), # 创建参数background_r
'background_g': LaunchConfiguration('background_g'), # 创建参数background_g
'background_b': LaunchConfiguration('background_b'), # 创建参数background_b
}]
),
])
Attention
launch文件中出现的argument和parameter,虽都译为“参数”,但含义不同:- argument:仅限launch文件内部使用,方便在launch中调用某些数值;- parameter:ROS系统的参数,方便在节点见使用某些数值。
加载参数文件
以上例程我们在launch文件中一个一个的设置参数,略显麻烦,当参数比较多的时候,建议使用参数文件进行加载。
learning_launch/parameters_yaml.launch.py
import osfrom ament_index_python.packages
import get_package_share_directory # 查询功能包路径的方法
from launch import LaunchDescription # launch文件的描述类
from launch_ros.actions import Node # 节点启动的描述类
def generate_launch_description(): # 自动生成launch文件的函数
config = os.path.join( # 找到参数文件的完整路径
get_package_share_directory('learning_launch'), 'config', 'turtlesim.yaml' )
return LaunchDescription([ # 返回launch文件的描述信息
Node( # 配置一个节点的启动
package='turtlesim', # 节点所在的功能包
executable='turtlesim_node', # 节点的可执行文件名
namespace='turtlesim2', # 节点所在的命名空间
name='sim', # 对节点重新命名
parameters=[config] # 加载参数文件
)
])
Launch文件包含
在复杂的机器人系统中,launch文件也会有很多,此时我们可以使用类似编程中的include机制,让launch文件互相包含。
文件解析
learning_launch/namespaces.launch.py
import osfrom ament_index_python.packages
import get_package_share_directory # 查询功能包路径的方法
from launch import LaunchDescription # launch文件的描述类
from launch.actions import IncludeLaunchDescription # 节点启动的描述类
from launch.launch_description_sources import PythonLaunchDescriptionSourcefrom launch.actions
import GroupAction # launch文件中的执行动作
from launch_ros.actions import PushRosNamespace # ROS命名空间配置
def generate_launch_description(): # 自动生成launch文件的函数
parameter_yaml = IncludeLaunchDescription( # 包含指定路径下的另外一个launch文件
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('learning_launch'), 'launch'),
'/parameters_nonamespace.launch.py']) )
parameter_yaml_with_namespace = GroupAction( # 对指定launch文件中启动的功能加上命名空间
actions=[
PushRosNamespace('turtlesim2'),
parameter_yaml] )
return LaunchDescription([ # 返回launch文件的描述信息
parameter_yaml_with_namespace
])
功能包编译配置
... data_files=[ ('share/ament_index/resource_index/packages', ['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob(os.path.join('launch', '*.launch.py'))), (os.path.join('share', package_name, 'config'), glob(os.path.join('config', '*.*'))),
(os.path.join('share', package_name, 'rviz'), glob(os.path.join('rviz', '*.*'))), ], ...
参考链接:
https://docs.ros.org/en/humble/Tutorials/Launch/Launch-Main.html
https://docs.ros.org/en/humble/Tutorials/Launch/Using-ROS2-Launch-For-Large-Projects.html
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!