构建VREP和MATLAB联合仿真实验平台,控制机械臂末端按照固定轨迹移动
2023-12-13 20:42:08
构建VREP和MATLAB联合仿真实验平台,控制机械臂末端按照固定轨迹移动。主要工作如下:
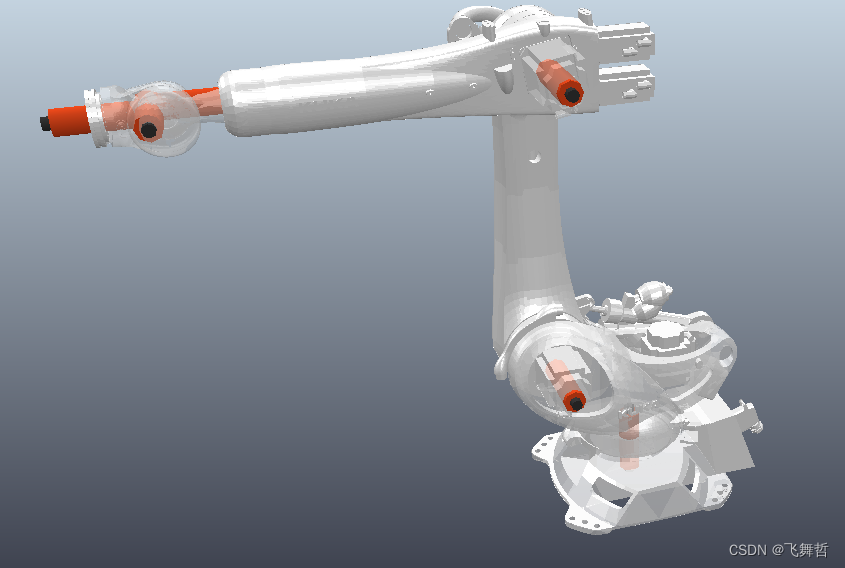
(1)solidworks构建机械臂模型;
(2)将solidworks中构建的模型导入VREP中建立机械臂的多体动力学模型;
(3)建立VREP和MATLAB之间的通信;
(4)构建DH坐标系,建立机械臂的正运动学模型;
(5)求解机械臂的逆运动学模型;
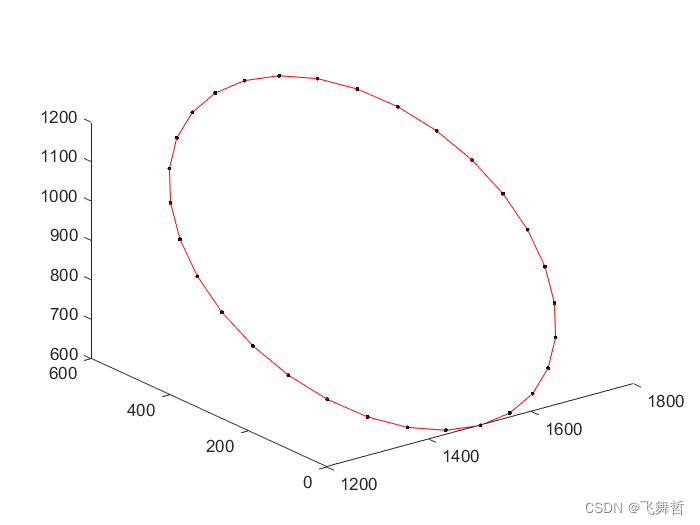
(6)规划末端执行器运动轨迹;
(7)编写MATLAB控制程序,控制机械臂按规划轨迹运动;
(8)撰写报告。
成果如下:
DH:

vrep模型:
逆解和轨迹规划:

技术交流邮箱:3531225003@qq.com,有问题请添加邮箱对应的企鹅?
文章来源:https://blog.csdn.net/qq_37469992/article/details/134909313
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!