推荐算法:HNSW【推荐出与用户搜索的类似的/用户感兴趣的商品】
HNSW算法概述
HNSW(Hierarchical Navigable Small Word)算法算是目前推荐领域里面常用的ANN(Approximate Nearest Neighbor)算法了。其目的就是在极大量的候选集当中如何快速地找到一个query最近邻的k个元素。
要找到一个query的k个最近邻元素,一个朴素的思想就是我去计算这个query和所有的总量N 个候选元素的距离,然后选择其中的前k 个最小元素,这个经典算法的算法复杂度是O(Nlog(k)),显然这个算法复杂度实在是太高了,无法适用于实际的使用场景。
而要解决这个问题,可以有多种实现方法,这里所要说的HNSW算法就是目前比较常用的一种搜索算法,它算是其前作NSW算法的一个升级版本,但是两者的本质都是基于一个朴素的思路,就是通过图连接的方式给所有的N 个候选元素事先地定义好一个图连接关系,从而可以将前述的算法复杂度当中的N 的部分给减小掉,从而优化整体的检索效率。
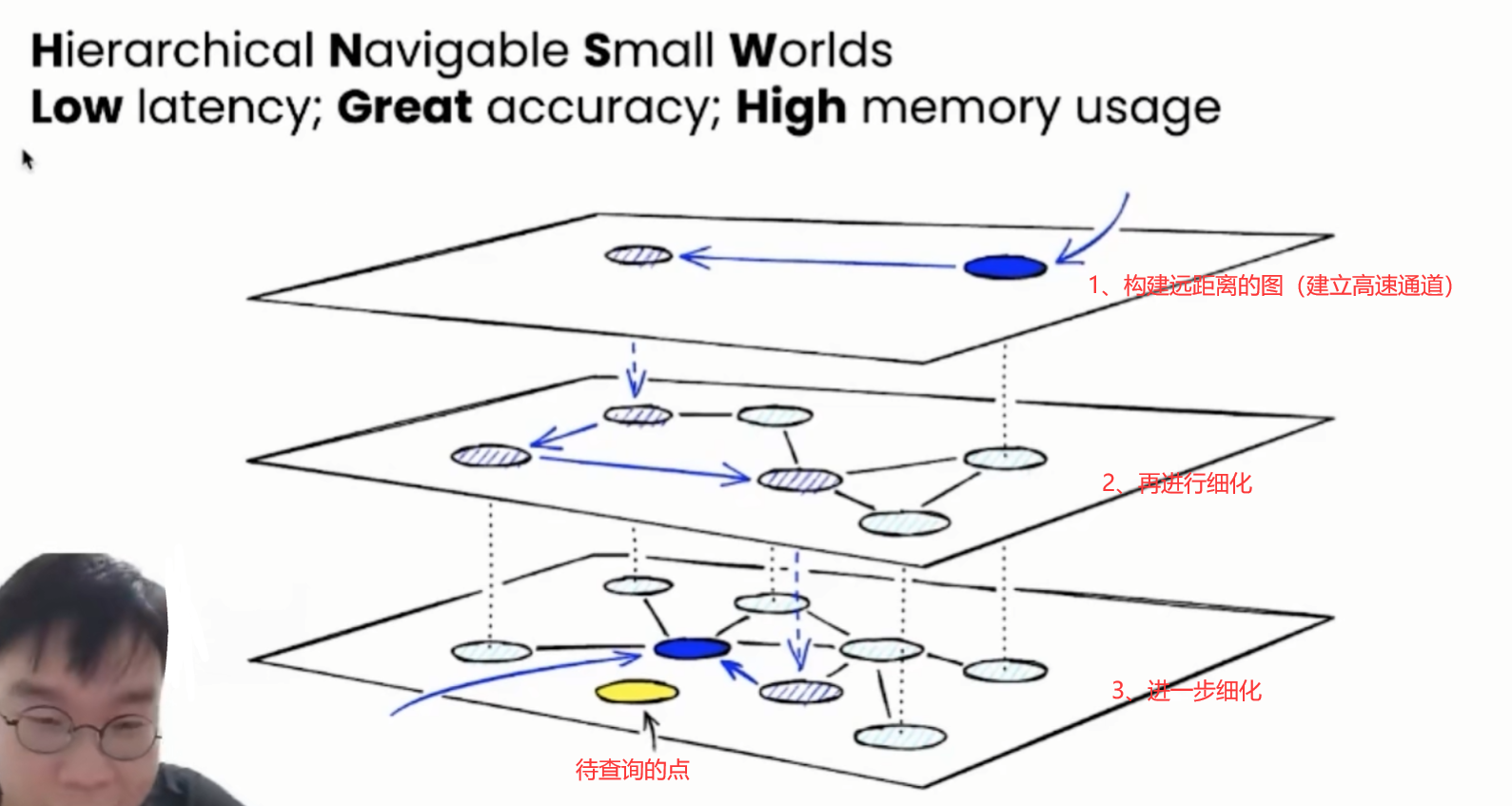
其整体的一个图结果可以用下图进行表达:

解决的问题:做高效率相似性查找。推荐系统中,如何找到与用户query最相近的几个item,然后推荐出去【也就是推荐出与用户搜索的类似的/用户感兴趣的商品】。
解决方法有:Annoy,KD-Tree, LSH, PQ,NSW, HNSW等。
近似最近邻搜索算法(Approximate Nearest Neighbor Search,ANNS)发展:近邻图(Proximity Graph)–> NSW --> Skip List --> HNSW
近似最近邻搜索算法(Approximate Nearest Neighbor Search,ANNS)
1. 近邻图(Proximity Graph)
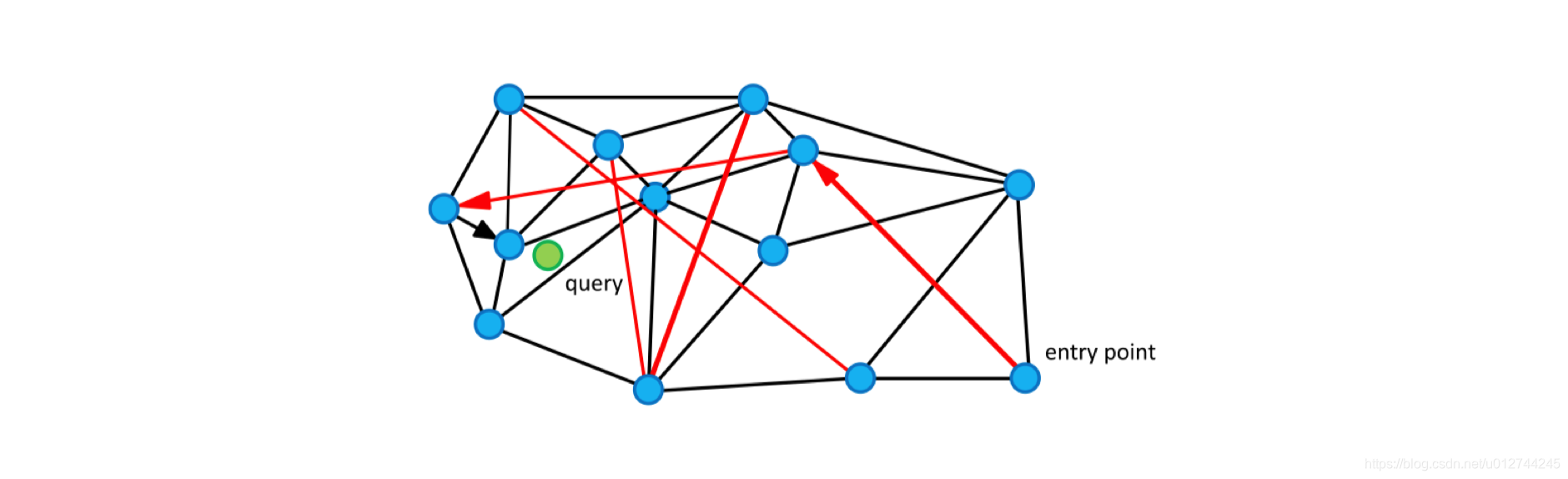
近邻图(Proximity Graph): 最朴素的图算法
思路: 构建一张图, 每一个顶点连接着最近的 N 个顶点。 Target (红点)是待查询的向量。在搜索时, 选择任意一个顶点出发。 首先遍历它的友节点, 找到距离与 Target 最近的某一节点, 将其设置为起始节点, 再从它的友节点出发进行遍历, 反复迭代, 不断逼近, 最后找到与 Target 距离最近的节点时搜索结束。

存在的问题:
- 图中的K点无法被查询到。
- 如果要查找距离Target (红点)最近的topK个点, 而如果点之间无连线, 将影响查找效率。
- D点有这么多友节点吗? 增加了构造复杂度。谁是谁的友节点如何确定?
- 如果初始点选择地不好(比如很远),将进行多步查找。
2. NSW算法原理
NSW,即没有分层的可导航小世界的结构(Navigable-Small-World-Graph )。
针对上面的问题,解决办法:
- 某些点无法被查询到 -> 规定构图时所有节点必须有友节点。
- 相似点不相邻的问题 -> 规定构图时所有距离相近到一定程度的节点必须互为友节点。
- 关于某些点有过多友节点?-> 规定限制每个节点的友节点数量。
- 初始点选择地很远 -> 增加高速公路机制。
2.1 NSW构图算法
图中插入新节点时,通过随机存在的一个节点出发查找到距离新节点最近的m个节点(规定最多m个友节点,m由用户设置),连接新节点到这最近的m个节点。节点的友节点在新的节点插入的过程中会不断地被更新。
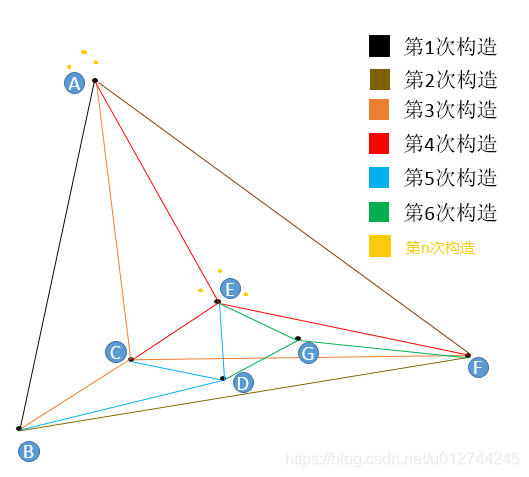
m=3(每个点在插入时找3个紧邻友点)。
第1次构造:图为空,随机插入A,初始点为A。图中只有A,故无法挑选友节点。插入B,B点只有A点可选,所以连接BA。
第2次构造:插入F,F只有A和B可以选,所以连接FA,FB。
第3次构造:插入C,C点只有A,B,F可选,连接CA,CB,CF。
第4次构造:插入E,从A,B,C,F任意一点出发,计算出发点与E的距离和出发点的所有“友节点”和E的距离,选出最近的一点作为新的出发点,如果选出的点就是出发点本身,那么看我们的m等于几,如果不够数,就继续找第二近的点或者第三近的点,本着不找重复点的原则,直到找到3个近点为止。找到了E的三个近点,连接EA,EC,EF。
第5次构造:插入D,与E点的插入一模一样,都是在“现成”的图中查找到3个最近的节点作为“友节点”,并做连接。
第6次构造:插入G,与E点的插入一模一样,都是在“现成”的图中查找到3个最近的节点作为“友节点”,并做连接。
在图构建的早期,很有可能构建出“高速公路”。
第n次构造:在这个图的基础上再插入6个点,这6个点有3个和E很近,有3个和A很近,那么距离E最近的3个点中没有A,距离A最近的3个点中也没有E,但因为A和E是构图早期添加的点,A和E有了连线,我们管这种连线叫“高速公路”,在查找时可以提高查找效率(当进入点为E,待查找距离A很近时,我们可以通过AE连线从E直接到达A,而不是一小步一小步分多次跳转到A)。
结论:一个点,越早插入就越容易形成与之相关的“高速公路”连接,越晚插入就越难形成与之相关的“高速公路”连接。
这个算法设计的妙处就在于扔掉德劳内三角构图法,改用“无脑添加”(NSW朴素插入算法),降低了构图算法时间复杂度的同时还带来了数量有限的“高速公路”,加速了查找。
2.2 NSW查找算法
图中的边有两个不同的目的:
- Short-range edges,用作贪婪搜索算法所需的近似 Delaunay 图。
- Long-range edges,用于贪婪搜索的对数缩放。负责构造图形的可导航小世界(NSW)属性。
优化查找:
- 建立一个废弃列表visitedSet,在一次查找任务中遍历过的点不再遍历。
- 建立一个动态列表result,把距离查找点最近的n个点存储在表中,并行地对这n个点进行同时计算“友节点”和待查找点的距离,在这些“友节点”中选择n个点与动态列表中的n个点进行并集操作,在并集中选出n个最近的友点,更新动态列表。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!