GPIO的使用--USART串口通信--传感器控制数据
2023-12-14 16:32:03
目录
?一、串口通信
1、概念
串行接口是一种可以将接收来自CPU的并行数据字符转换为连续的串行数据流发送出去,同时可将接收的串行数据流转换为并行的数据字符供给CPU的器件。一般完成这种功能的电路,我们称为串行接口电路。
串口通信(Serial Communications)的概念非常简单,串口按位(bit)发送和接收字节的通信方式。
2、原理图
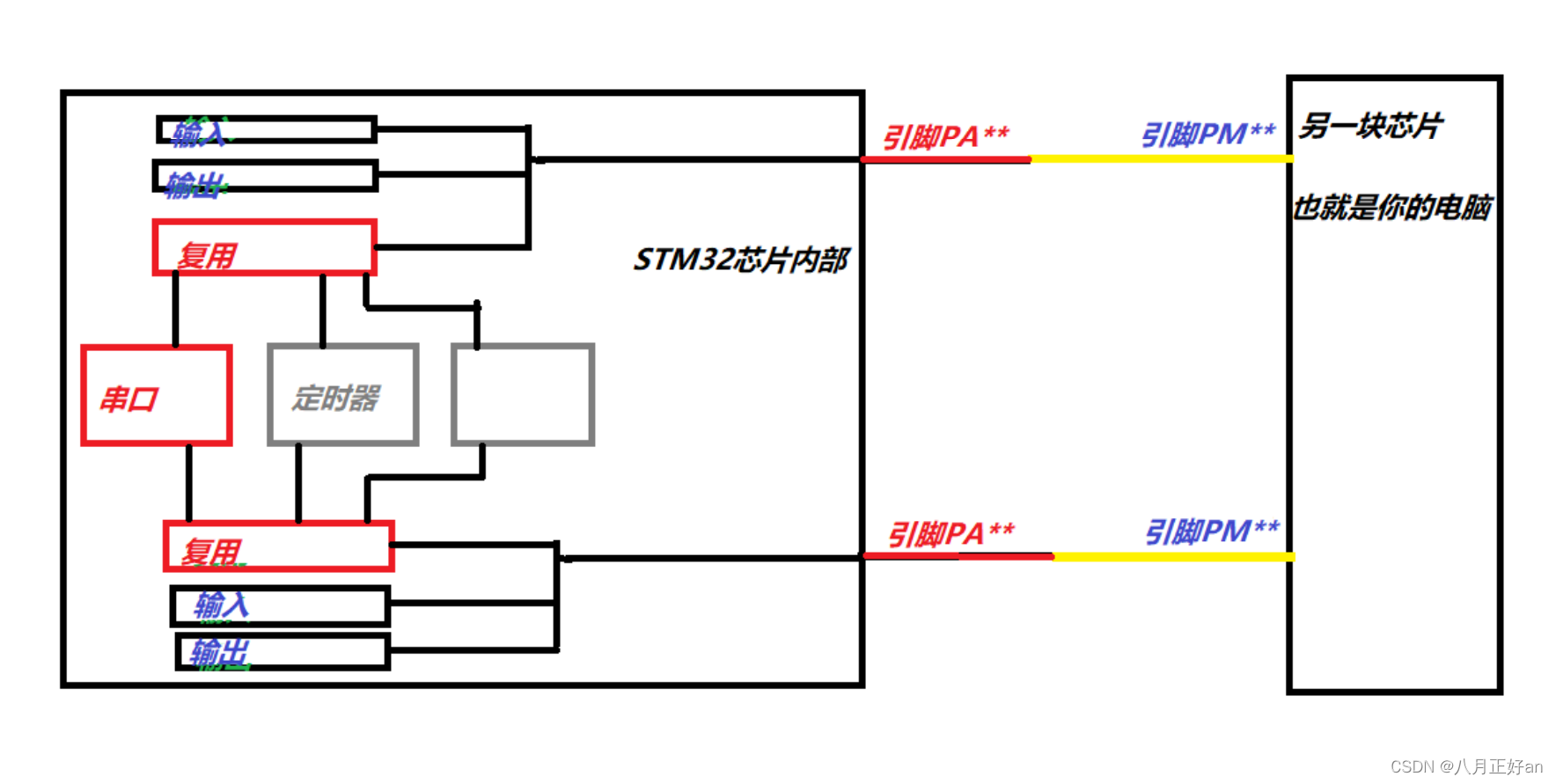
串口本身也是通过引脚与外界通信的。通信过程如下:
3、使用步骤
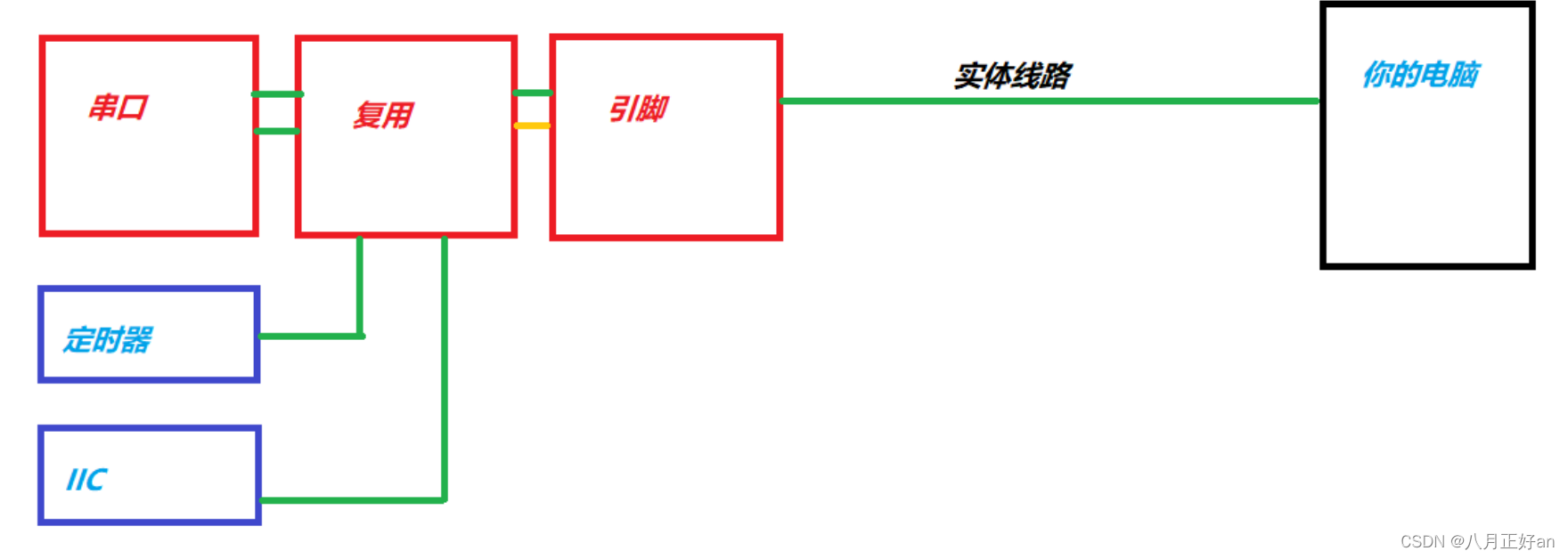
串口不属于输入输出部分,属于复用部分,那么参数的配置也就和之前学习GPIO的不同了,大致思路:1.告诉引脚如何工作。2.告诉复用选择哪一个。3.告诉串口如何工作。4.用一根实体线路(串口)连接两台设备。就完成啦

(1)寻找串口位置
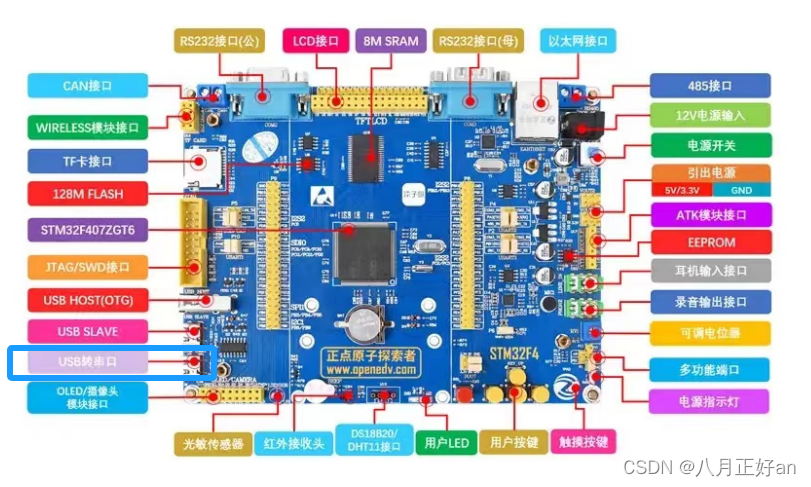
(2)确定引脚编号


最终得到数据:PA9 :GPIOA组第9个成员。 PA10:GPIOA组第10个成员 USART1:串口第一个成员 组号:GPIOA 成员号:GPIO_Pin_9
(3)编写代码
a、时钟使能GPIOA组,让USART1工作
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);//时钟使能A组,需要PA10和PA9工作
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能usart1b、GPIO五大参数配置
//GPIO参数配置,告诉GPIO PA9和PA10 如何工作
GPIO_InitTypeDef gpio_struct;
gpio_struct.GPIO_Mode=GPIO_Mode_AF;//复用模式
gpio_struct.GPIO_OType=GPIO_OType_PP;//不影响,但是一般配推挽
gpio_struct.GPIO_Pin=GPIO_Pin_9|GPIO_Pin_10;
gpio_struct.GPIO_PuPd=GPIO_PuPd_NOPULL;
gpio_struct.GPIO_Speed=GPIO_High_Speed;
GPIO_Init(GPIOA,&gpio_struct);//让PA9和PA10知道以复用模式工作c、告诉复用模块我的选择
//告诉复用模块,到底想要复用哪一个功能,我们选择了usart
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
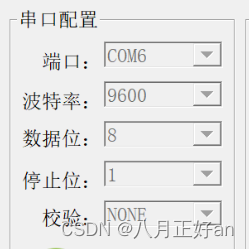
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);d、USART1参数配置,此处![]() 程序要与代码和串口接口参数设置一致
程序要与代码和串口接口参数设置一致
代码参数
//usart1参数配置,告诉它如何工作
USART_InitTypeDef usart_struct;
usart_struct.USART_BaudRate= 9600; //速率
usart_struct.USART_HardwareFlowControl= USART_HardwareFlowControl_None; //流控,目前不启用这块//usart也是控制协议
usart_struct.USART_Mode=USART_Mode_Rx|USART_Mode_Tx; //既接收又发送
usart_struct.USART_Parity= USART_Parity_No; //校验位,深化协议的时候弄
usart_struct.USART_StopBits= USART_StopBits_1; //停止位
usart_struct.USART_WordLength= USART_WordLength_8b; //有效负载?![]() 程序参数
程序参数
e、初始化和使能USART
USART_Init(USART1,&usart_struct);
USART_Cmd(USART1, ENABLE);//让usart工作f、发送和接收串口数据
//接收数据函数
USART_ReceiveData(USART1);
//数据发送函数
USART_SendData(USART1, j);g、写入运行代码
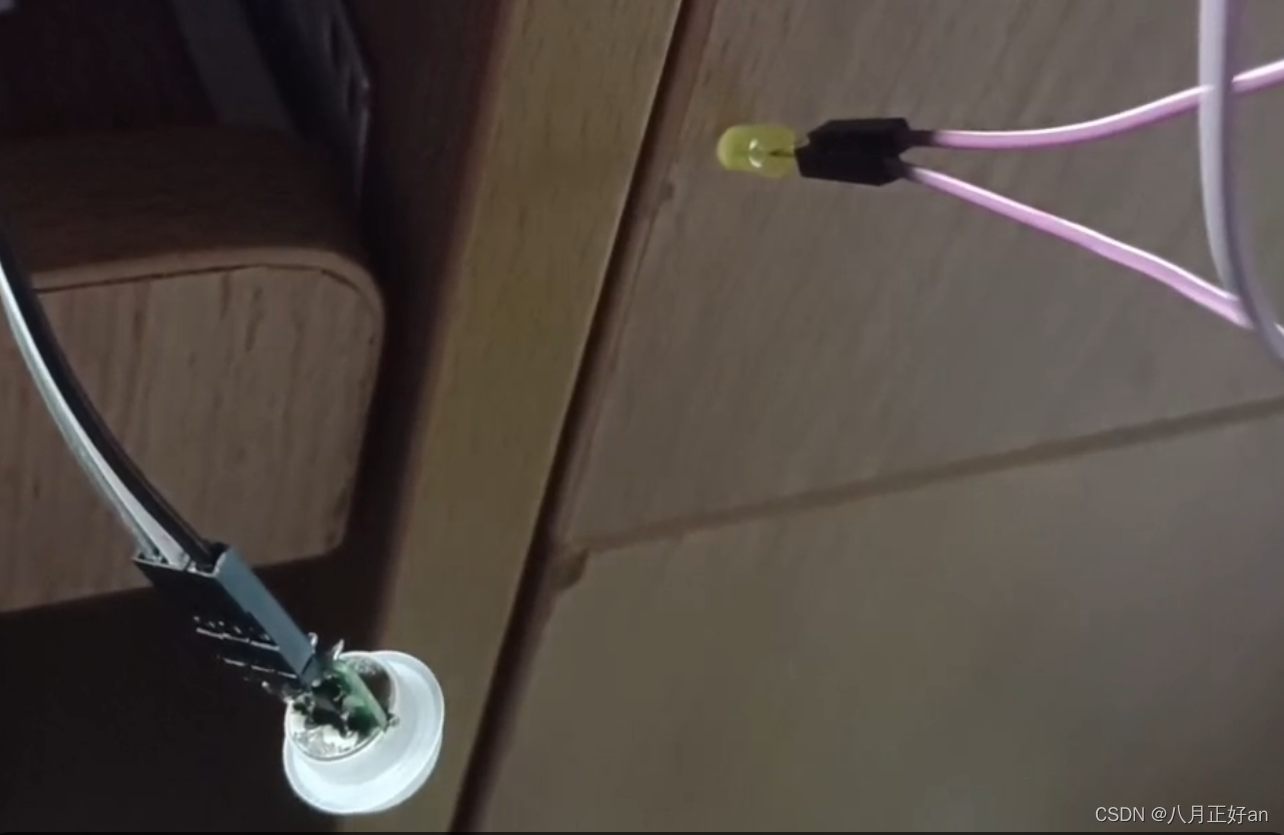
接入传感器(详见上篇文章),烧录检查
4、实验结果
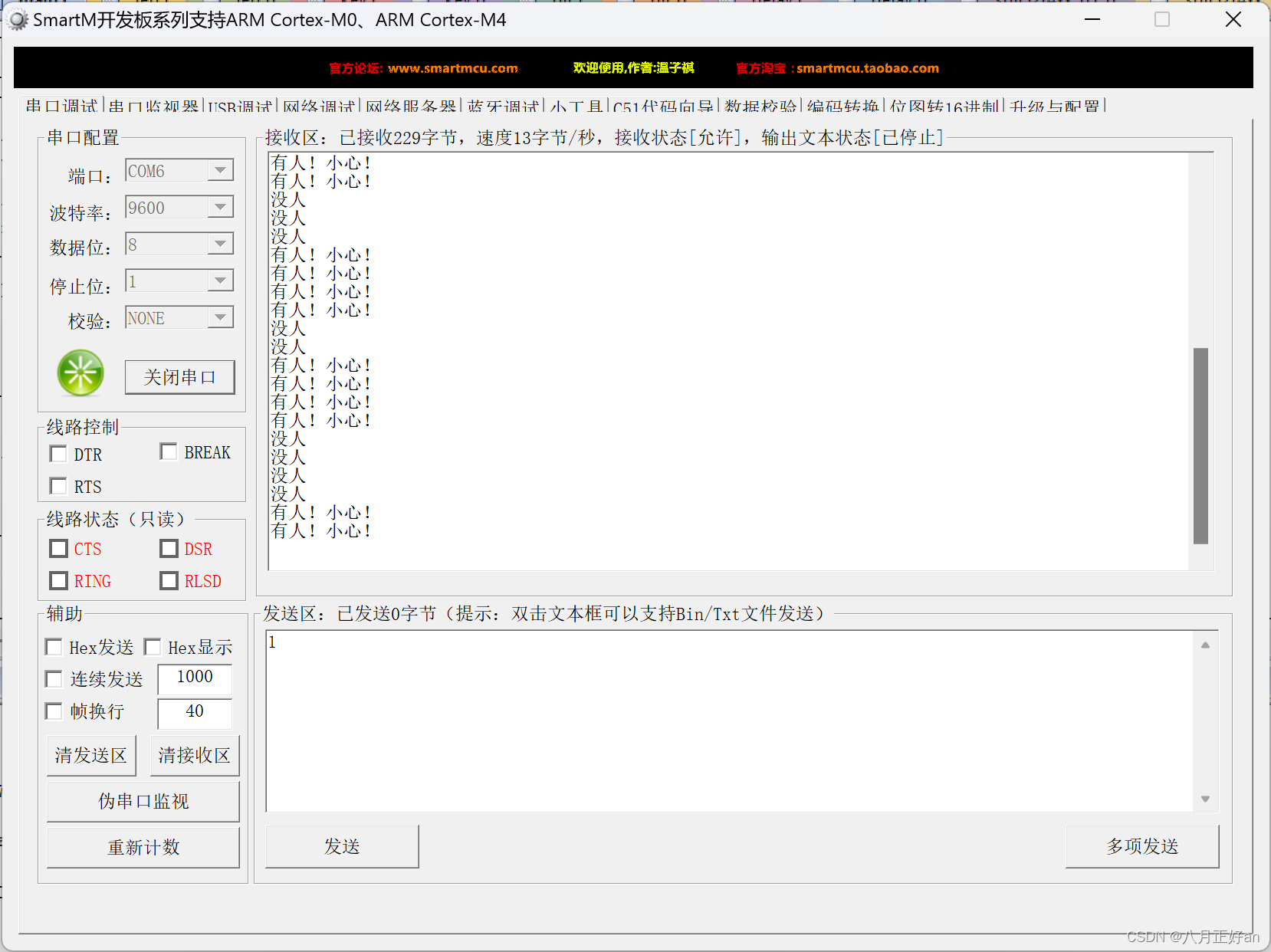
实验结果

实验代码
main.c
#include "stm32f4xx.h" // Device header
#include "led.h"
#include "key.h"
#include "BitBand.h"
#include "pir.h"
#include "delay.h"
#include <stdio.h>
#include "usart.h"
//此函数可以让printf打印字符串
int fputc(int ch,FILE* pf)
{
USART_SendData(USART1,ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);
return ch;
}
int main()
{
Led_Init();
Pir_Init();
Usart_Init();
uint16_t j='1';
uint32_t key=0;
while(1)
{
//数据发送函数
USART_SendData(USART1, j);
key=PFin(14);
if(key==1)//有人
{
PFout(12)=0;
j='1';
USART_SendData(USART1, j);
printf("有人!小心!\n");
}
else//否则周边没有人
{
PFout(12)=1;
j='0';
USART_SendData(USART1, j);
printf("没人\n");
}
delay_ms(1000);
}
}usart.c
#include "stm32f4xx.h" // Device header
void Usart_Init()
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);//时钟使能A组,需要PA10和PA9工作
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能usart1
//GPIO参数配置,告诉GPIO PA9和PA10 如何工作
GPIO_InitTypeDef gpio_struct;
gpio_struct.GPIO_Mode=GPIO_Mode_AF;//复用模式
gpio_struct.GPIO_OType=GPIO_OType_PP;//不影响,但是一般配推挽
gpio_struct.GPIO_Pin=GPIO_Pin_9|GPIO_Pin_10;
gpio_struct.GPIO_PuPd=GPIO_PuPd_NOPULL;
gpio_struct.GPIO_Speed=GPIO_High_Speed;
GPIO_Init(GPIOA,&gpio_struct);//让PA9和PA10知道以复用模式工作
//告诉复用模块,到底想要复用哪一个功能,我们选择了usart
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
//usart1参数配置,告诉它如何工作
USART_InitTypeDef usart_struct;
usart_struct.USART_BaudRate= 9600; //速率
usart_struct.USART_HardwareFlowControl= USART_HardwareFlowControl_None; //流控,目前不启用这块//usart也是控制协议
usart_struct.USART_Mode=USART_Mode_Rx|USART_Mode_Tx; //既接收又发送
usart_struct.USART_Parity= USART_Parity_No; //校验位,深化协议的时候弄
usart_struct.USART_StopBits= USART_StopBits_1; //停止位
usart_struct.USART_WordLength= USART_WordLength_8b; //有效负载
USART_Init(USART1,&usart_struct);
USART_Cmd(USART1, ENABLE);//让usart工作
}
usart.h
void Usart_Init(void);
文章来源:https://blog.csdn.net/m0_69724592/article/details/134906689
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!