DDIM学习笔记
写在前面:
(1)建议看这篇论文之前,可先看我写的前一篇论文:
DDPM推导笔记-大白话推导
主要学习和参考了以下文章:
(1)一文带你看懂DDPM和DDIM
(2)关于 DDIM 采样算法的推导
0. DDIM的创新点
? DDPM有一个很大的缺点就是其本身是一个马尔科夫链的过程,推理速度太慢,如果前向加噪过程是1000步,那么去噪过程就需要使用Unet生成噪声,然后去噪,这样进行1000步。这是一个及其缓慢的过程,DDIM原论文中举了一个生动的例子:
? For example, it takes around 20 hours to sample 50k images of size 32 x 32 from a DDPM, but less than a minute to do so from a GAN on a Nvidia 2080 Ti GPU.
? 基于DDPM,DDIM主要有两项改进:
? (1)对于一个已经训练好的DDPM,只需要对采样公式做简单的修改,模型就能在去噪时「跳步骤」,在一步去噪迭代中直接预测若干次去噪后的结果。比如说,假设模型从时刻T=100开始去噪,新的模型可以在每步去噪迭代中预测10次去噪操作后的结果,也就是逐步预测时刻t=90,80,…,0的结果。这样,DDPM的采样速度就被加速了10倍。
? (2)DDIM论文推广了DDPM的数学模型,打破了马尔科夫链的过程,从更高的视角定义了DDPM的反向过程(去噪过程)。在这个新数学模型下,我们可以自定义模型的噪声强度,让同一个训练好的DDPM有不同的采样效果。
1. 公式推导
? DDPM的推导过程可以看《DDPM推导笔记》,这里假设
P
(
x
t
?
1
∣
x
t
,
x
0
)
P(x_{t-1}|x_t, x_0)
P(xt?1?∣xt?,x0?)满足如下正态分布,即:
P
(
x
t
?
1
∣
x
t
,
x
0
)
~
N
(
k
x
0
+
m
x
t
,
σ
2
)
即
:
x
t
?
1
=
k
x
o
+
m
x
t
+
σ
?
其中有:
?
~
N
(
0
,
1
)
(1)
P(x_{t-1}|x_t, x_0) \sim N(kx_0+mx_t, \sigma^2) \\ 即:x_{t-1} = kx_o+mx_t + \sigma \epsilon \tag{1} \\ 其中有: \epsilon \sim N(0, 1)
P(xt?1?∣xt?,x0?)~N(kx0?+mxt?,σ2)即:xt?1?=kxo?+mxt?+σ?其中有:?~N(0,1)(1)
又因为前向的加噪过程满足:
x
t
=
a
t
ˉ
x
0
+
1
?
a
t
ˉ
?
其中
?
~
N
(
0
,
1
)
(2)
x_t = \sqrt{\bar{a_t}} x_0 + \sqrt{1 - \bar{a_t}} \epsilon \\ 其中\epsilon \sim N(0,1) \tag{2}
xt?=at?ˉ??x0?+1?at?ˉ???其中?~N(0,1)(2)
合并(1)(2)上面两式,有:
x
t
?
1
=
k
x
0
+
m
[
a
ˉ
t
x
0
+
1
?
a
ˉ
t
?
]
+
σ
?
(3)
x_{t-1} = kx_0 + m[\sqrt{\bar{a}_t}x_0 + \sqrt{1-\bar{a}_t} \epsilon] + \sigma \epsilon \tag{3}
xt?1?=kx0?+m[aˉt??x0?+1?aˉt???]+σ?(3)
再次合并有:
x
t
?
1
=
(
k
+
m
a
ˉ
t
)
x
0
+
?
′
其中:
?
’
~
M
(
0
,
m
2
(
1
?
a
ˉ
t
)
+
σ
2
)
(4)
x_{t-1} = (k+m\sqrt{\bar{a}_t}) x_0 + \epsilon' \\ 其中: \epsilon’ \sim M(0, m^2(1-\bar{a}_t) + \sigma^2) \tag{4}
xt?1?=(k+maˉt??)x0?+?′其中:?’~M(0,m2(1?aˉt?)+σ2)(4)
从DDPM中可以可知:
x
t
?
1
=
a
ˉ
t
?
1
x
0
+
1
?
a
ˉ
t
?
1
?
(5)
x_{t-1} = \sqrt{\bar{a}_{t-1}} x_0 + \sqrt{1-\bar{a}_{t-1}} \epsilon \tag{5}
xt?1?=aˉt?1??x0?+1?aˉt?1???(5)
通过式(4)(5)的
x
t
?
1
x_{t-1}
xt?1?服从的概率分布可知:
k
+
m
a
ˉ
t
=
a
ˉ
t
?
1
m
2
(
1
?
a
ˉ
t
)
+
σ
2
=
1
?
a
ˉ
t
?
1
(6)
k + m\sqrt{\bar{a}_t} = \sqrt{\bar{a}_{t-1}} \\ m^2(1-\bar{a}_t) + \sigma^2 = 1-\bar{a}_{t-1} \tag{6}
k+maˉt??=aˉt?1??m2(1?aˉt?)+σ2=1?aˉt?1?(6)
由式(6)两个式子可解出:
将m,k带入到 P ( x t ? 1 ∣ x t , x 0 ) P(x_{t-1}|x_t, x_0) P(xt?1?∣xt?,x0?)中,可得:

依旧可以使用
x
t
,
x
0
x_t, x_0
xt?,x0?的关系式把
x
0
x_0
x0?去掉:
x
t
=
a
t
ˉ
x
0
+
1
?
a
t
ˉ
?
这里为了防止
?
和后面的
?
搞混,这里记为
?
t
,
则上式变为:
x
t
=
a
t
ˉ
x
0
+
1
?
a
t
ˉ
?
t
(8)
x_t = \sqrt{\bar{a_t}} x_0 + \sqrt{1 - \bar{a_t}} \epsilon \\ 这里为了防止\epsilon和后面的\epsilon搞混,这里记为\epsilon_{t},则上式变为:\\ x_t = \sqrt{\bar{a_t}} x_0 + \sqrt{1 - \bar{a_t}} \epsilon_t \tag{8}
xt?=at?ˉ??x0?+1?at?ˉ???这里为了防止?和后面的?搞混,这里记为?t?,则上式变为:xt?=at?ˉ??x0?+1?at?ˉ???t?(8)
从
P
(
x
t
?
1
∣
x
t
,
x
0
)
P(x_{t-1}|x_t, x_0)
P(xt?1?∣xt?,x0?)的概率分布采样可得到:

其中, ? \epsilon ?是从标准正太分布中,随机采样得到; ? t \epsilon_t ?t?是和DDPM一样,使用神经网络训练而来的; x t x_t xt?是输入; a ˉ t ? 1 和 a ˉ t \bar{a}_{t-1}和\bar{a}_t aˉt?1?和aˉt?是事先定义好的。至此,我们就只需要讨论 σ \sigma σ这个参数了。
2. σ \sigma σ的讨论
? 怎样选取 σ \sigma σ才能获得最佳的加速效果呢?
? 作者做了一些实验,作者原文中使用
σ
τ
i
(
η
)
\sigma_{\tau_i}{(\eta)}
στi??(η)来表示的
σ
\sigma
σ,其式子如下:

使用
η
\eta
η控制其大小。事实上,当
η
=
1
\eta = 1
η=1时就变成了DDPM的去噪过程了,
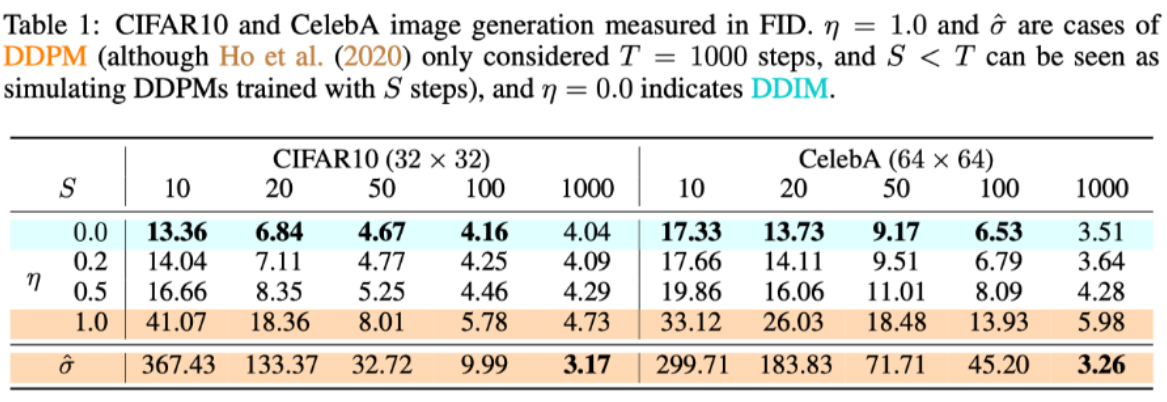
当 η = 0 \eta=0 η=0时,效果是最好的。所以DDIM令 σ = 0 \sigma=0 σ=0。
3. x p r e v x_{prev} xprev?的推导
? 从式9且 σ = 0 \sigma=0 σ=0,则式9中的所有都已知了!!!
? 但是,即使这样,我们也还是由 x t 推导出 x t ? 1 x_t推导出x_{t-1} xt?推导出xt?1?呀,这样还是不能加快推理!
? 不忙,我们回过头去思考,发现上面的推导过程中全程没有使用:
x
t
=
a
t
x
t
?
1
+
1
?
a
t
?
x_t= \sqrt{a_t}x_{t-1} + \sqrt{1-a_t} \epsilon
xt?=at??xt?1?+1?at???
? 也就可以不需要严格的由
x
t
算到
x
t
?
1
x_t算到x_{t-1}
xt?算到xt?1?,则可以令
x
p
r
e
v
替代
x
t
?
1
x_{prev}替代x_{t-1}
xprev?替代xt?1?,式(9)则可以变换为:

? 至此,所有的参数要是实现定义好了,要么是需要训练的,这样 x t 和 x p r e v x_t和x_{prev} xt?和xprev?则可以相隔多个迭代步数。
4.疑难解答
? Q1: 为什么式(11)可以简单的将 x p r e v 替代 x t ? 1 x_{prev}替代x_{t-1} xprev?替代xt?1?,毕竟虽然反向过程没有使用到 x t ? 1 算到 x t x_{t-1}算到x_{t} xt?1?算到xt?的关系式,但前向过程是使用到的呀?
? 目前我也没有答案!还在理解中,由大佬路过,请留言讨论!
? Q2: 为什么在DDIM可以令方差 σ = 0 \sigma=0 σ=0 ?
? 目前我也没有答案!还在理解中,由大佬路过,请留言讨论!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!