DALI1.0学习——BIT解码
最近在学习DALI调光相关知识并下载了Microchip提供的基于ATMega88PA的软件工程及硬件设计参考方案。写这些文章的目的就是把自己对知识的理解作一些梳理。
芯片厂果然专业,考虑得相当周到,为了芯片销量连软件和硬件方案全都提供了。芯片厂关于DALI1.0实现的软硬件参考链接地址如下:Salesforce![]() https://microchip.my.salesforce.com/sfc/p/#o0000000KAkK/a/3l000001Iuci/0yucLkmht5A3PuLOo2MVtWQlQA1Ca1FgNK1KkCKafeg
https://microchip.my.salesforce.com/sfc/p/#o0000000KAkK/a/3l000001Iuci/0yucLkmht5A3PuLOo2MVtWQlQA1Ca1FgNK1KkCKafeg
Firmware部分是DALI1.0实现的源代码,包括底层驱动及上层应用,使用AVR系列专用开发IDE:Microchip Studio。
这一篇主要理解下如何解码主机发送来的BIT信号,重点是dali_bit.c文件,关于DALI主机发送数据的时序可以参考这篇博文:DALI通信及C语言实现 - 斑鸠,一生。 - 博客园 (cnblogs.com)
主机和从机通信使用半双工,波特率为1200,参考示例中从机使用GPIO的边沿跳变(上升沿和下降沿都触发)结合定时器来解码主机发送来的信号,具体配置如下:
1、GPIO为双边沿跳变中断,中断处理完成后定时器计数清零;
2、定时器溢出时间为32微秒。1200BIT/S的波特率传输一个BIT的时间约833微秒,半个BIT,也就是一个TE为416微秒,所以定时器约溢出13次左右,曼切斯特编码是在传输一半BIT时间的时候产生边沿跳变,传输1就是上升沿,0是下降沿;
定时器和GPIO配置完成后,就开始等待主机发送前向帧,从机解析数据的思路如下:
1、总线在没有数据发送时,从机的接收引脚(也就是双边沿跳变引脚)一直是高电平;
2、当主机发送起始号时,从机的接收引脚会检测到一个下降沿,当经过约半个BIT的时间后如果检测到一个上升沿,则证明是有效的起始信号,进入准备接收信号阶段;
3、以后每隔两个TE就读取一次实际传输的BIT,如图1所示,同时不停检测是否有连续4个TE,如果数据接收完成后出现4个连续TE,证明是接收到了停止位,本次数据接收成功,如果数据没有接收完成就出现4个TE说明传输出错;
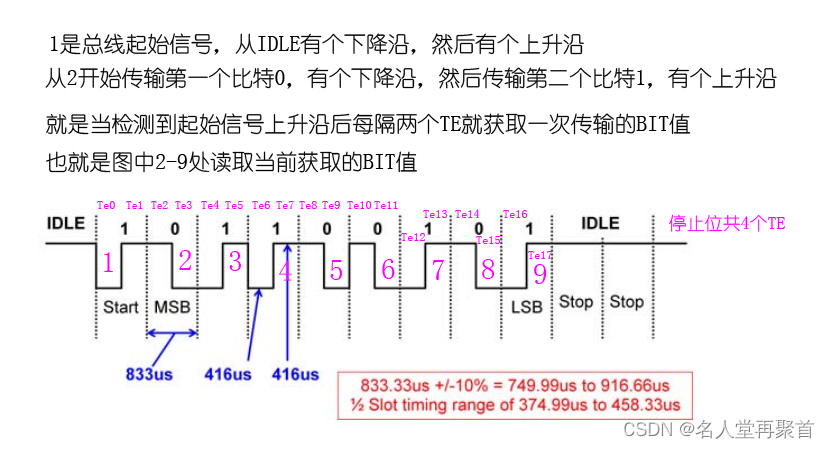
图1:DALI时序
4、正确检测到停止位后,将接收到的地址和数据递交给上一层进行帧逻辑处理。
再来看源代码文件dali_bit.c,DALI从机的接收引脚边沿跳变中断处理程序dali_bit_pcint_interrupt函数如下:
/**
* \brief External pin interrupt handler
*
* This is the handler for external pin interrupt
*/
void dali_bit_pcint_interrupt(void)
{
static uint8_t bit_index;
uint8_t bit_index_temp;
uint8_t dali_bit_rx;
bit_index_temp = bit_index;
pin_level = DALI_INPORT & (1 << DALI_INPUT);
if (status_receive == 0) {
if (pin_level == LOW) {
/* dali bus falling edge indicates start bit */
bit_index_temp = 0;
status_receive = BIT_START;
dali_rec_addr = 0;
dali_rec_data = 0;
}
} else if (status_receive == BIT_START) {
/* dali pin must be high after the second INT0 edge */
if ((level_time > MIN_TE_CNT) && (level_time < MAX_TE_CNT)) {
/* get the start bit and get ready for 16 bit data. */
status_receive = BIT_0;
bit_index_temp += 1;
} else {
/* Start bit error */
status_receive = 0;
}
} else if (status_receive < BIT_STOP1) {
if (level_time > MIN_2TE_CNT) {
/* Long level (2xTe) is detected */
bit_index_temp += 2;
} else if ((level_time > MIN_TE_CNT) &&
(level_time < MAX_TE_CNT)) {
/* Short level (1xTe) is detected */
bit_index_temp += 1;
} else {
status_receive = 0;
}
if (bit_index_temp >= 34) {
/* If the last Te is low (dali bit 0), a rising edge is
* detected before stop bit */
status_receive = BIT_STOP1;
}
/* Decode dali bit at every second Te bit */
if (bit_index_temp & 0x01) {
/* shift out the lowest bit to get dali bit */
dali_bit_rx = bit_index_temp >> 1;
if (dali_bit_rx <= BIT_7) { //the current bit number, maximum 8 for the address byte
/* get the address byte */
dali_rec_addr <<= 1;
if (pin_level) {
dali_rec_addr |= 0x01;
}
} else {
/* get the data byte */
dali_rec_data <<= 1;
if (pin_level) {
dali_rec_data |= 0x01;
if (dali_bit_rx == BIT_15) {
/* if the last Te is high (dali bit 1), a Te
* high period is added before stop bit */
status_receive = BIT_STOP2;
}
}
}
}
} else {
status_receive = 0;
}
dali_slave_set_addr_to_service(dali_rec_addr);
dali_slave_set_data_to_service(dali_rec_data);
bit_index = bit_index_temp;
TCNT0 = 0;
level_time = 0;
}代码分析:
1、由于在接收主机发送的数据时会多次进入边沿跳变中断,必须使用静态变量bit_index并结合变量bit_index_temp保存当前已获取的BIT索引,确切的说应该是TE索引,pin_level用于获取从机输入引脚的电平状态,变量status_receive表示当前接收的是起始信号、数据还是停止位;
2、当主机发送起始信号时会触发第一个下降沿,第16行判断如果DALI输入引脚是低电平,则初始化一些变量,并将接收状态转为BIT_START,也就是起始信号;
3、起始信号下降沿触发后,第二次边沿跳变触发时必须是上升沿,且触发时间必须是在一个TE周期内才被认为是正常的起始信号,如图2所示,Start部分先有一个下降沿然后一个上升沿才开始发送MSB。变量level_time会在定时器0的溢出中断处理程序中累加,溢出时间约为32微秒(8MHz频率不分频,最大计数256,溢出时间 = 256/8000000),约13个溢出周期后就是一个TE的时间:416微秒左右,当然这个时间不可能刚好,有正负5个溢出周期左右误差范围,所以第25行使用了if ((level_time > MIN_TE_CNT) && (level_time < MAX_TE_CNT))。此时变量bit_index_temp被设置为1,同时status_receive设置为准备接收第一个数据BIT,即BIT_0;
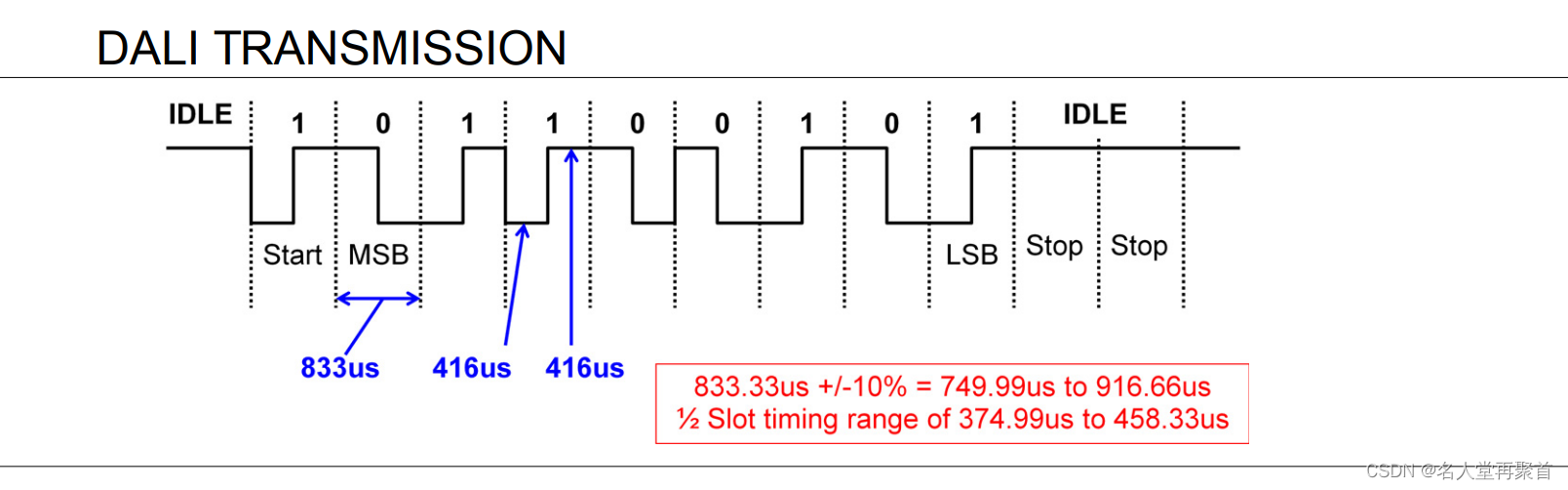
图2:起始信号,先一个下降沿然后一个上升沿
4、正确接收到起始信号后,准备接收地址和数据字节。代码第34行判断只要不是接收停止位就保存当前接收到的BIT。代码第35行到第41行判断:如果是经过两个TE时间才产生边沿跳变中断的话则将bit_index_temp加2,否则加1。当发送不同BIT值时就会出现两个TE后才会出现边沿跳变的情况,例如:前面的比特是0,后面接着是1就会出现连续两个TE的低电平然后产生上升沿跳变,如图3所示;
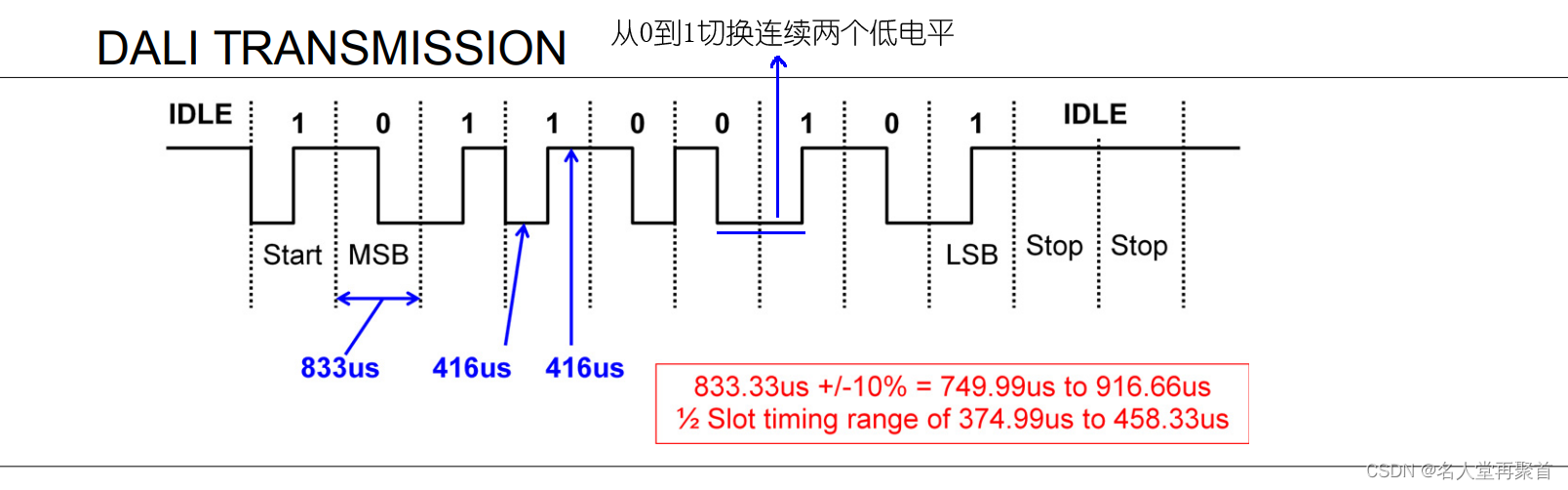
图3:BIT值改变时会有两个连续TE的高或低电平
5、代码第46行判断当bit_index_temp>=34时就将status_receive切换到接收停止位1,因为包括起始BIT、地址字节和数据字节共17个BIT,也就是34个TE,当接收到最后一个BIT并且是低电平,这里要注意:只有当最后一个BIT是低电平时,bit_index_temp才会等于34,高电平应该是33。最后一个BIT是0且它后面出现上升沿则证明接收到的是停止位1;
6、代码第53行到76行是解码接收到的BIT值并赋值给地址变量dali_rec_addr和数据变量dali_rec_data。首先第53行使用了if (bit_index_temp & 0x01),bit_index_temp必须为奇数且大于1时if条件才为真。那我们来看一下当接收地址和数据的BIT时,bit_index_temp是不是奇数并且对应的BIT是否正确,如图4所示,当起始位的上升沿产生后bit_index_temp被设置为1,然后从35行到41行根据边沿跳变触发时间将bit_index_temp加2或者加1,我们可以看到bit_index_temp确实是在每次为奇数时才读取接收到的BIT,为节省空间在图中我把bit_index_temp改为了bit_idx。
第1个红点位置:也就是有效起始信号上升沿中断时bit_idx = 1
第2个红点位置:由于经过两个TE才产生下降沿中断,bit_idx执行了加2,变成3,此时if (bit_index_temp & 0x01)条件为真,读取数据刚好是BIT值0,和曼切斯特编码含义一样
第3个红点位置:经过了两个TE产生了上升沿中断,bit_idx执行了加2,变成5,此时if (bit_index_temp & 0x01)条件为真,读取数据刚好是BIT值1,和曼切斯特编码含义一样
第4个红点位置:经过了1个TE产生了下降沿中断,bit_idx执行了加1,变成6,此时if (bit_index_temp & 0x01)条件为假,所以没有读取数据
第5个红点位置:经过了1个TE产生了上升沿中断,bit_idx执行了加1,变成7,此时if (bit_index_temp & 0x01)条件为真,读取数据刚好是BIT值1,和曼切斯特编码含义一样
第6个红点位置:经过了两个TE产生了下降沿中断,bit_idx执行了加2,变成9,此时if (bit_index_temp & 0x01)条件为真,读取数据刚好是BIT值0,和曼切斯特编码含义一样
后面的以此类推,可见确实是bit_index_temp变量为奇数且非起始位时才读取并保存BIT值。
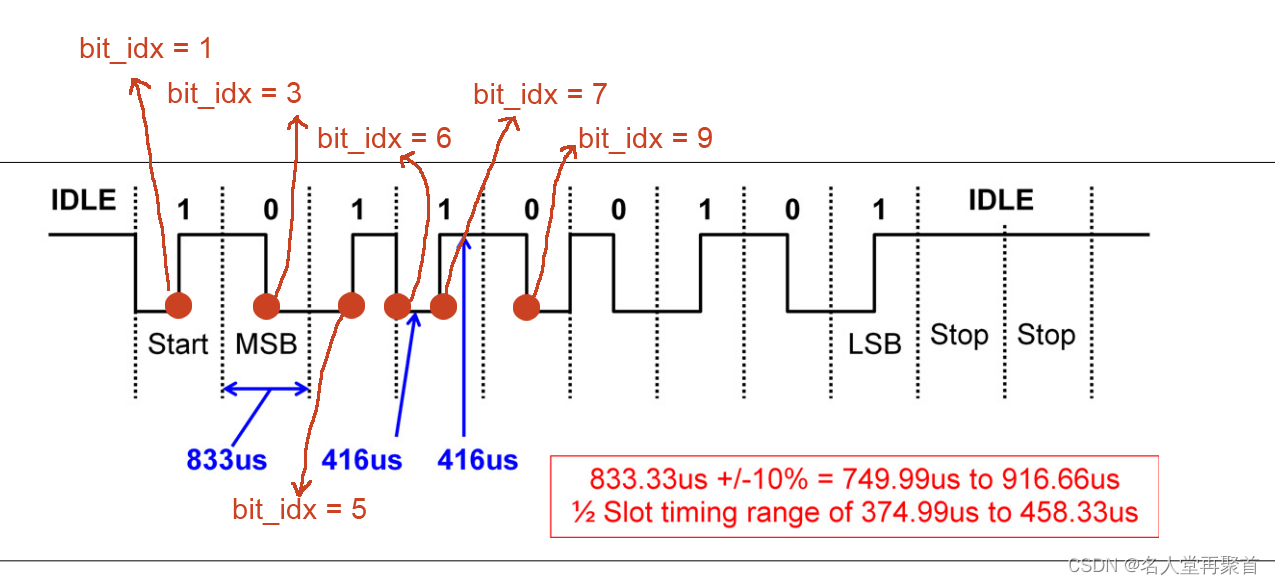
图4:bit_index_temp为奇数时读取数据
7、dali_bit_rx用于判断当前接收到的是地址字节还是数据字节并计算出BIT号,BIT_0到BIT_15,对应值:1-16,小于等于BIT_7时是地址字节,否则就是数据字节。前面说过奇数位获取一次数据,每隔两个值计算一下当前的BIT序号,所以dali_bit_rx = bit_index_temp >> 1。代码第60行和第66行根据当前引脚的电平来保存数据,在第68行判断如果是最后一个数据BIT了,则设置接收状态为停止位2。
8、最后几行代码主要将定时器0的计数值清零并且将定时器0溢出次数level_time清零。用局部静态变量保存当前的TE索引号,以便下次产生边沿跳变中断时赋值给bit_index_temp。
DALI1.0的比特解码部分就介绍到这里,后续继续整理其他内容,希望和大家一起学习交流。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!