嵌入式系统复习--ARM技术概述
上一篇
ARM体系结构
ARM体系结构的技术特征
- ARM的体系结构采用了若干Berkeley RISC处理器的特征
- Load/store体系结构
- 固定的32为指令
- 3地址指令格式
- 同时也放弃的一些Berkeley RISC特征
- 寄存器窗口
- 延迟转移
- 所有的指令单周期执行
ARM体系结构的基本版本
ARM处理器体系结构发展了v1 ~ v8共8个版本
具有两种执行状态支持三个主要指令集:
A32(ARM):32为固定长度指令集,通过不同架构变体增强部分32为架构执行环境(AArch32)
T32(Thumb):以16为固定长度指令集的形式引入的,随后在引入Thumb-2技术时增强为16位和32位混合长度指令集,部分32位架构执行环境现在称为AArch32
A64:提供ARM和Thumb指令集类似功能的32位固定长度指令集,随ARMv8一起引入,是一种AArch64指令集。

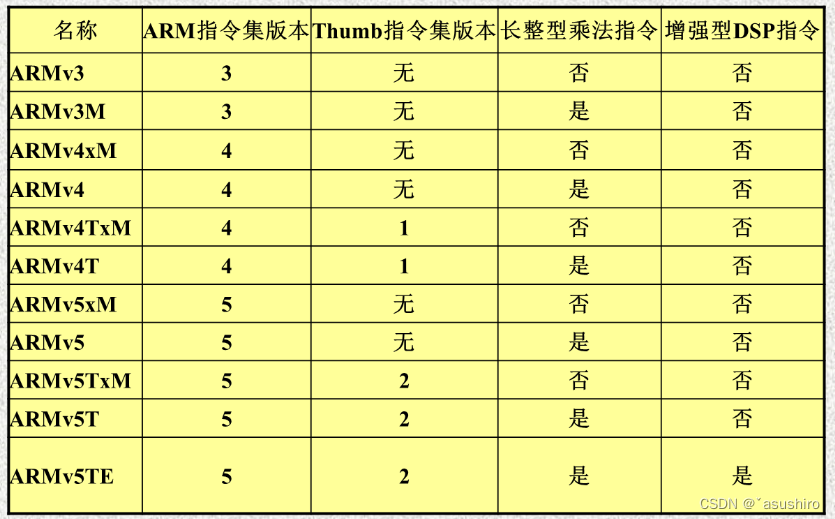
ARM体系结构的演变
- Thumb指令集(T变种)
Thumb指令集是把32位的ARM指令集的一个子集重新编码后而形成一个特殊的16位的指令集 - 长乘指令(M变种)
长乘指令是一种生成64位相乘结果的乘法指令(此指令为ARM指令),M变种增加了两条长乘指令 - 增强型DSP指令(E变种)
E变种的ARM体系增加了一些增强处理器对典型的DSP算法处理能力的附加指令 - Java加速器Jazelle(J变种)
ARM的Jazelle技术时Java语言和先进的32位RISC芯片完美结合的产物 - ARM媒体功能扩展(SIMD变种)
ARM体系结构的命名规则
命名由下面几部分组成
- 基本字符串ARMv
- 基本字符串后为ARM指令集版本号
- ARM指令集版本号后为表示所含变种的字符。由于在ARM体系版本4以后,M变种称为标准部件,所以字符M通常也不单独列出来
- 最后使用的字符x表示排除某种功能
Thumb技术介绍
ARM的RISC体系结构的发展中已经提供了低功耗、小体积、高性能的方案。而为了解决代码长度问题,ARM体系结构有增加了T变种,开发了一种新的指令体系,这就是Thumb指令集,它是ARM技术的一大特色。
技术概述
它有从标准32位ARM指令集抽出来的36条指令格式,从新变成16位的操作码,提高代码密度。
支持Thumb的核仅仅是ARM体系结构的一种扩展,所以编译器既可以编译Thumb代码,又可以编译ARM代码,处理器状态可以方便的切换、运行到Thumb状态,在该状态下指令集是16位的Thumb指令集。
特点
优点:在性能代码大小之间取得平衡,在需要低的存储代码时采用Thumb指令系统,但又比纯粹16的系统更高的性能,因为实际执行的是32位指令,所以用Thumb指令编写最小代码量的程序,却取得以ARM代码执行的最好性能
缺点:
- 完成相同操作,需要更多指令,因此对系统运行时间要求苛刻的场合用ARM更合适
- 没有进行异常处理需要的一些指令,当发生异常中断时,还是需要使用ARM指令,这就需要处理器进行状态之间的切换
Thumb2技术
Thumb2内核技术,在与现有ARM技术方案完全兼容,他是一种混合型指令集,兼有16位及32位指令,增加32位指令解决了之前Thumb指令集不能访问协处理器、特权指令和特殊功能指令(例如SIMD)的权限。Thumb2现在可以实现所以的功能,就不需要在ARM/Thumb状态之间反复切换了,代码密度和性能得到显著提高。
ARM处理器工作状态
两种状态:
- ARM,执行字对准的32位ARM指令
- Thumb,执行半字对准的16位Thumb指令
在Thumb状态下,程序计数器PC使用位1选择另一个半字。
处理器在另种状态下切换时:
- 不影响处理器的模式或寄存器内容。
- 两种状态都有相应的状态切换命令
- 在最开始执行代码时,只能处于ARM状态
工作状态的切换方法:
- 进入Thumb状态
寄存器Rm状态位bit[0]为1时,执行
进入Thumb状态BX Rm - 进入ARM状态
寄存器Rm状态位bit[0]为0时,执行
进入ARM状态BX Rm
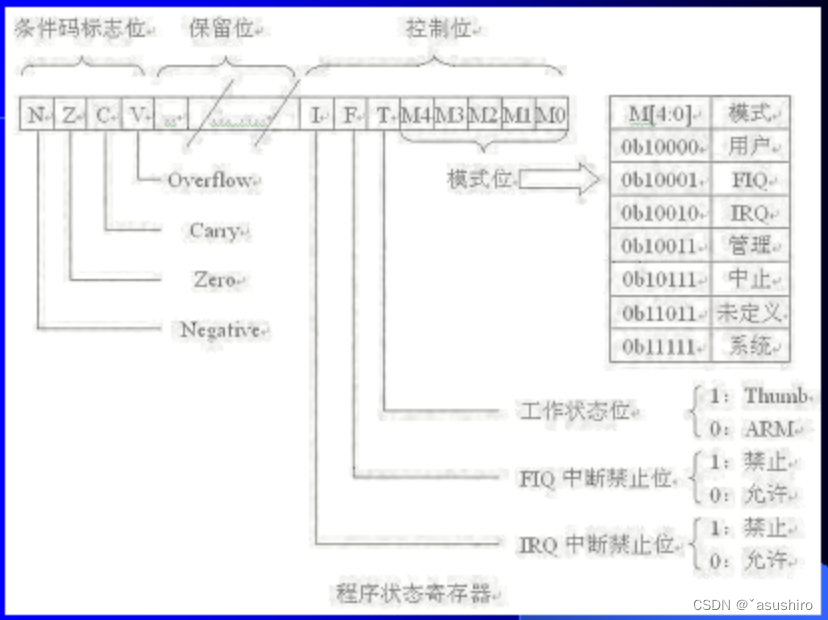
CPSR(当前程序状态寄存器)的低5位用于定义当前操作模式
| CPSR[4:0] | 模式 | 用途 | 可访问的寄存器 |
|---|---|---|---|
| 10000 | 用户 | 正常用户模式,程序正常执行 | PC,R14~R0,CPSR |
| 10001 | FIQ | 处理快速中断,支持高速数据传送或通道处理 | PC, R14_fiq ~ R8_fiq, R7~R0, CPSR, SPSR_fiq |
| 10010 | IRQ | 处理普通中断 | PC, R14_irq ~ R13_irq, R12 ~ R0, CPSR, SPSR_irq |
| 10011 | SVC | 操作系统保护模式,处理软件中断(SEI) | PC, R14_svc ~ R13_svc, R12 ~ R0, CPSR, SPSR_svc |
| 10111 | 中止(ABT) | 处理存储器故障、实现虚拟存储器和存储器保护 | PC, R14_abt ~ R13_abt, 12 ~ R0, CPSR, SPSR_abt |
| 11011 | 未定义 | 处理为定义的指令陷阱,支持硬件协处理器的软件仿真 | PC, R14_und ~ R13_und, R12 ~ R0, CPSR, SPSR_und |
| 11111 | 系统 | 运行特权操作系统任务 | PC, R14 ~ R0, CPSR |
注:标红的为异常模式
ARM寄存器组成概述
ARM处理器共有37个寄存器,可以分为两类寄存器:
- 32个通用寄存器
- R0 ~ R15
- R8_fiq~R14_fiq
- R13_irq、R14_irq
- R13_svc、R14_svc
- R13_abt、R14_abt
- R13_und、R14_und
- 6个状态寄存器
CPSR, SPSR_fiq, SPSR_irq, SPSR_svc, SPSR_abt, SPSR_und
其中通用寄存器分为:
- 不分组寄存器 (R0 ~ R7)
这意味着所有处理器模式下,都访问的是这些寄存器,真正意义下的通用寄存器 - 分组寄存器(R8 ~ R14)
R13通常用作堆栈指针(SP)
R14用作程序链接寄存器(Link Register (LR)) - 程序计数器(R15(PC))
R15值的改变将引起程序执行顺序的改变,可能引起不可预料的结果,采用多级流水线技术,因此保存在R15中的程序地址并不是当前指令的地址,一些指令对R15的用法有一些特殊的要求
ARM程序状态寄存器
- 所有处理器模式下都可以访问当前的程序状态寄存器CPSR。CPSR包含条件码标志、中断禁止位、当前处理器模式以及其他状态和控制信息。
- 在每种异常模式下都有一个对应的物理寄存器–程序状态保存寄存器(SPSR)。
- 当异常发生时,SPSR用于保存CPSR的状态,以便异常返回后恢复异常发生时的工作状态。
Thumb状态寄存器组织
- 8个通用寄存器(R0 ~ R7)
- 程序计数器(R15 (PC) )
- 堆栈指针(R13 (SP) )
- 链接寄存器(R14 (LR) )
- 当前状态寄存器(CPSP)
- 每个特权状态都有各自一组SP, LR, SPSR
ARM的异常响应过程
异常响应过程如下:
- 将CPSR的内容保存到将要执行的异常中断对应的SPSR中
- 设置当前状态寄存器CPSR中的相应位
- 将引起异常指令的下一条指令的地址保存到新的异常工作模式的R14(LR)
- 给程序计数器(PC)强制赋值
每个异常模式下都有
- SP堆栈寄存器
可用来定义一个存储区域保存其他用户寄存器,这样异常处理程序就可以使用这些寄存器 - LR连接寄存器
返回地址,中断结束返回的地址
而FIQ模式还有额外的专用寄存器R8_fiq ~ R12_fiq, 使用这些寄存器可以加快快速中断的处理速度。
从异常中断处理程序中返回过程:
- 所有修改过的用户寄存器必须从处理程序的保护堆栈中恢复(即出栈)
- 将SPSR_mode寄存器内容复制到CPSR中,使得CPSR从相应的SPSR中恢复,即恢复被中断的程序工作状态
- 根据异常类型将PC变回到用户指令流中相应指令出
- 最后清除CPSR中的中断禁止标志位I/F
异常中断的优先级:1.复位 2.数据异常中断 3.FIQ 4.IRQ 5.预取指异常中止 6.SWI,未定义指令
ARM的流水线方式
- 3级流水线(到ARM7为止是)
取指级,译码级,执行级
pc要根据流水线的对应位置,对R15的值相对改变 - 5级流水线
取指、译码、执行、缓冲/数据、回写
ARM存储器接口及存储器层次
ARM处理器支持的6中数据类型
- 8位有符号和无符号字节
- 16位有符号和无符号半字,他们以两字节为边界定位
- 32位有符号和无符号字,他们以4字节的边界定位
大端存储,是将数据的低位字节放到高地址处,高位字节放到低地址处。
小端存储,是将数据的低位字节放到低地址处,高位字节放到高地址处。
存储器层次
- 寄存器组
- 片上RAM
- 片上Cache
- 主存储器
- 硬盘
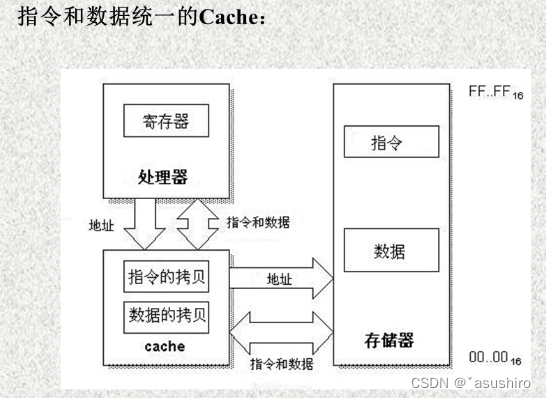
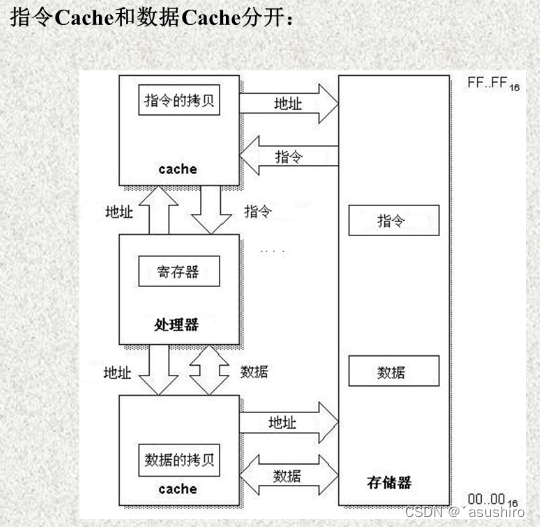
Cache及WRITE BUFFER
MMU完成的工作
- 实现从虚拟地址到物理地址的转换
- 存储器访问权限的控制
- 设置虚拟存储空间的缓冲特性
用于存储管理的系统控制协处理寄存器CP15
在基于ARM的嵌入式系统中,存储系统通常使用CP15来完成存储器的大部分管理工作。包含16个32位寄存器编号0 ~ 15
快速上下文切换技术
通过修改系统中不同进程的虚拟地址,避免在进行进程间切换时造成的虚拟地址到物理地址的重映射,从而提高系统性能。
ARM片上总线AMBA
- AHB: 用于连接高性能系统模块。它支持突发数据传输方式及单个数据传输方式,所有时序参考同一个时钟沿。
- ASB:用于连接高性能系统模块,支持突发数据穿输模式
- APB: 是一个简单接口支持低性能的外围接口
异常表示
R14_<exception_mode> = return link
SPSR_<exception_mode> = CPSR
CPSR[4:0] = exception mode number
CPSR[5] = 0 //在ARM状态运行
If <exception_mode> == Reset or FIQ then
CPSR[6] = 1
CPSR[7] = 1
PC = exceptoin vector address
复位操作:
一旦有复位输入,ARM处理器就立即停止执行指令,完成一列操作
R14_svc = UNPREDICTALE value
SPSR_svc = UNPREDICTALE value
CPSR[4:0] = 0b10011 // 进入管理模式
CPSR[5] = 0 // 在ARM状态运行
CPSR[6] = 1 //禁止快速中断
CPSR[7] = 1 //禁止正常中断
PC = 0x00000000
中断请求异常(IRQ)
通过处理器上的IRQ输入引脚,有外部引入IRQ中断异常,比FIQ有优先级低,当进入FIQ处理会屏蔽IRQ异常
R14_irq = address of next instruction to be
executed +4
SPSR_irq = CPSR
CPSR[4:0] = 0b10010 // 进入IRQ模式
CPSR[5] = 0 //在ARM状态运行
CPSR[7] = 1//禁止正常中断
PC = 0x00000018
下一篇
未完待续
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!