SLAM算法与工程实践——SLAM基本库的安装与使用(6):g2o优化库(2)g2o编程框架
SLAM算法与工程实践系列文章
下面是SLAM算法与工程实践系列文章的总链接,本人发表这个系列的文章链接均收录于此
SLAM算法与工程实践系列文章链接
下面是专栏地址:
SLAM算法与工程实践系列专栏
前言
这个系列的文章是分享SLAM相关技术算法的学习和工程实践
SLAM算法与工程实践——SLAM基本库的安装与使用(6):g2o优化库(2)
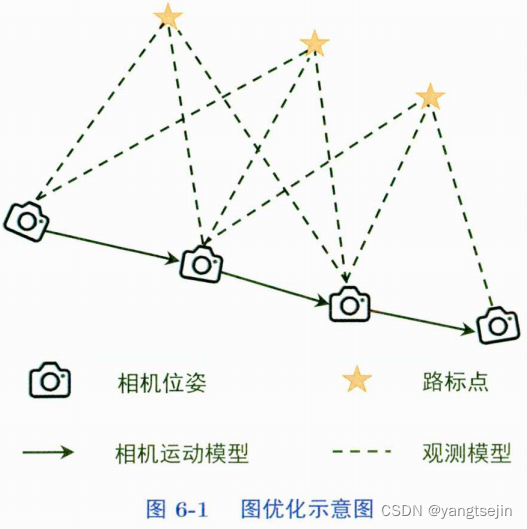
图结构:
- 顶点:待优化的变量。比如机器人位姿、空间中地图点(路标点)
- 边:顶点之间的约束产生的误差,比如重投影误差
图优化的目的是通过调整顶点来使得边的整体误差最小,此时的顶点认为是最准确的
g2o 求解曲线参数的例子
// 每个误差项优化变量维度为3,误差值维度为1
typedef g2o::BlockSolver<g2o::BlockSolverTraits<3,1>> Block;
// 第1步:创建一个线性求解器(LinearSolver)
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>();
// 第2步:创建块求解器(BlockSolver),并用上面定义的线性求解器初始化
Block* solver_ptr = new Block( linearSolver );
// 第3步:创建总求解器(Solver),并从GN、LM、DogLeg中选择一个,再用上述块求解器初始化
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg( solver_ptr );
// 第4步:创建稀疏优化器(SparseOptimizer)
g2o::SparseOptimizer optimizer; // 创建优化器
optimizer.setAlgorithm( solver ); // 用前面定义好的求解器作为求解方法
optimizer.setverbose( true ); // 在优化过程中输出调试信息
// 第5步:定义图的顶点,并添加到优化器中
CurveFittingVertex* v = new CurveFittingVertex(); //向图中增加顶点
v->setEstimate( Eigen::Vector3d(0,0,0) );
v->setId(0);
optimizer.addvertex( v );
// 第6步:定义图的边,并添加到优化器中
for (int i=0; i<N ; i++) // 向图中增加边
{
CurveFittingEdge* edge = new CurveFittingEdge(x_data[i]);
edge->setId(i);
edge->setvertex( 0 , v ); // 设置连接的顶点
edge->setMeasurement(y_data[i]); // 观测数值
// 信息矩阵:协方差矩阵之逆
edge->setInformation(Eigen::Matrix<double,1,1>::Identity() * 1 /(w_sigma * w_sigma));
optimizer.addEdge( edge );
}
// 第7步:设置优化参数,开始执行优化
optimizer.initializeOptimization();
optimizer.optimize(100); // 设置迭代次数
当然,在定义求解器变量时,可以直接一步到位,例如
// 梯度下降方法,可以从GN, LM, DogLeg 中选
auto solver = new g2o::OptimizationAlgorithmGaussNewton(g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
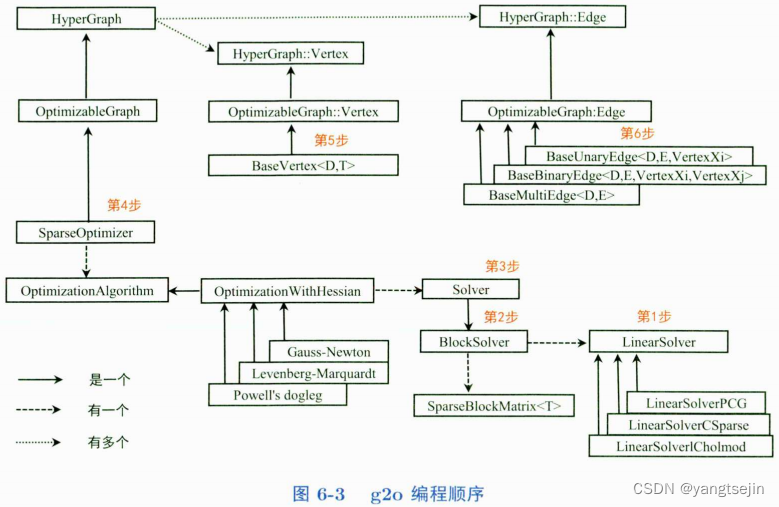
g2o求解步骤
第 1 步:创建一个线性求解器 ( LinearSolver )
我们要求的增量方程的形式是 H Δ x = ? b H\Delta x=-b HΔx=?b, 在通常情况下想到的方法就是直接求逆,也就是 Δ x = ? H ? 1 b \Delta x=-\boldsymbol{H}^{-1}\boldsymbol{b} Δx=?H?1b。看起来好像很简单,但有一个前提,就是 H H H 的维度较小,此时只需要对矩阵求逆就能解决问题。
当 H H H 的维度较大时,矩阵求逆变得很困难,求解问题也会变得很复杂。
需要使用一些特殊的方法对矩阵进行求逆,在 g2o 中主要有以下几种线性求解方法。
LinearSolverCholmod:使用 sparse cholesky 分解法。继承自 LinearSolverCCS
LinearSolvercSparse:使用 CSparse 法。继承自 LinearSolverCCS
LinearSolverPCG:使用 preconditioned conjugate gradient 法。继承自 LinearSolver
LinearSolverDense:使用 dense cholesky 分解法。继承自 LinearSolver
LinearSolverEigen:依赖项只有 eigen,使用 eigen 中 sparse Cholesky 求解,编译好后可以在其他地方使用。继承自 LinearSolver
第2步:创建块求解器(BlockSolver),并用上面定义的线性求解器初始化。
块求解器的内部包含线性求解器,用上面定义的线性求解器来初始化。
块求解器有两种定义方式,一种是固定变量的求解器,定义如下。
using BlockSolverPL = BlockSolver<BlockSolverTraits<p,l>>
其中,p 表示位姿的维度,l 表示路标点的维度。另一种是可变尺寸的求解器,定义如下。
using BlockSolverX = BlockSolverPL<Eigen::Dynamic,Eigen::Dynamic>;
为何会有可变尺寸的求解器呢?
因为在某些应用场景中,位姿和路标点在程序开始时并不能被确定,此时块求解器就没办法固定变量,应该使用可变尺寸的求解器,以便让所有的参数都在中间过程中被确定。
在块求解器头文件 block_solver.h 的最后,预定义了比较常用的几种类型,这个也不用记,以后遇到了知道这些数字代表什么意思就行了
BlockSolver_6_3:表示 pose 为 6 维,观测点为 3 维。用于 3D SLAM 中的 BA
BlockSolver_7_3:在 BlockSolver_6_3 的基础上多了一个 scale
BlockSolver_3_2:表示 pose 为 3 维,观测点为 2 维
第3步:创建总求解器(Solver),并从GN、LM、DogLeg中选择一个,再用上述块求解器初始化。
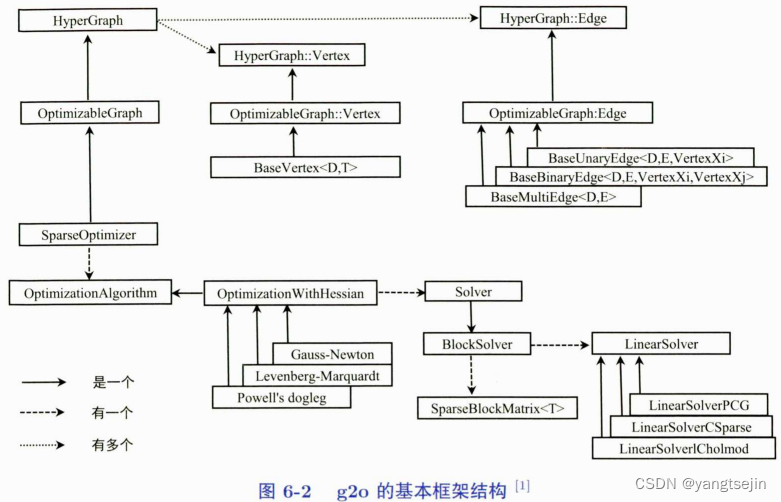
下面来看 g2o/g2o/core/ 目录,可以发现 Solver 的优化方法有3种,分别是Gauss Newton法、Levenberg-Marquardt法和Dogleg法。
如果进入这几个算法内部,就会发现它们都继承自同一个类——OptimizationWithHessian,而 OptimizationWithHessian 又继承自OptimizationAlgorithm,和图6-2正好对应。
// optimization_algorithm gauss_newton.h
// Gauss Newton 算法
class G2O_CORE_API OptimizationAlgorithmGaussNewton : public OptimizationAlgorithmwithHessian
{
// ......
};
// optimization_algorithm levenberg.h
// Levenberg 算法
class G2O_CORE_API OptimizationAlgorithmLevenberg : public OptimizationAlgorithmwithHessian
{
// ......
};
// optimization algorithm dogleg.h
// Powell's Dogleg 算法
class G2O_CORE_API OptimizationAlgorithmDogleg : public OptimizationAlgorithmWithHessian
{
// ......
};
// optimization algorithm_with_hessian.h
// brief Base for solvers operating on the approximated Hessian,e.g.,Gauss-Newton,Levenberg
class G2O_CORE_API OptimizationAlgorithmWithHessian : public OptimizationAlgorithm
{
// ......
};
总之,在该阶段,可以选择以下3种方法,其中用得比较多的是OptimizationAlgorithmLevenberg。
g2o::OptimizationAlgorithmGaussNewton
// Gauss Newton 法
g2o::OptimizationAlgorithmLevenberg
// Levenberg-Marquardt 法
g2o::OptimizationAlgorithmDogleg
// Dogleg 法
其中用得比较多的 OptimizationAlgorithmLevenberg。
第4步,创建稀疏优化器(SparseOptimizer),并用已定义求解器作为求解方法。
第5~6步,定义图的顶点和边,并添加到优化器中。
这部分比较复杂,我们在后面单独介绍。
第7步,设置优化参数,开始执行优化
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!