ros的slam建图和导航(含工作空间)
2023-12-13 05:31:04
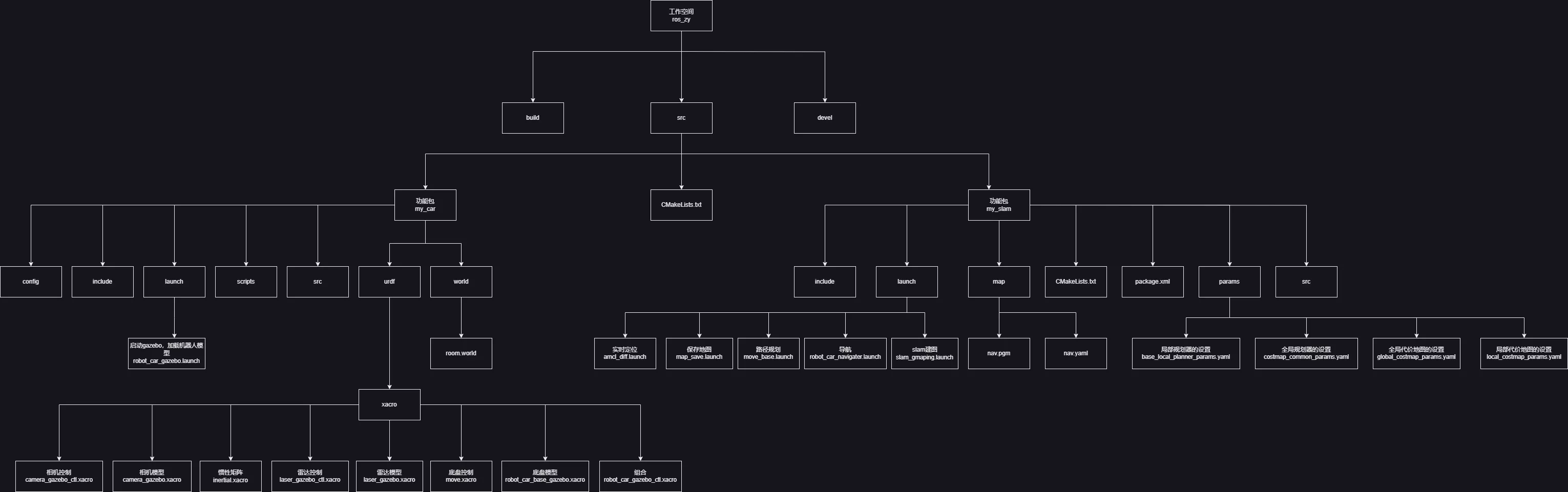
工作空间的结构
准备工作
创建工作空间(ros_zy)
mkdir ros_zy
进入工作空间
cd ros_zy
创建src文件夹(放源程序)
mkdir src
编译工作空间
catkin_make
打开vscode(从终端打开此工程)
code .
进入工作空间的src文件夹
cd src
创建功能包my_car,并加载依赖项roscpp,rospy,std_msgs,urdf,xacro
catkin_create_pkg my_car roscpp rospy std_msgs urdf xacro
进入demo1
cd ma_car
创建scripts(存放python脚本文件夹)
mkdir scripts
存储 urdf 文件的目录
mkdir urdf
配置文件
mkdir config
存储 launch 启动文件
mkdir launch
储存world模型
mkdir world
构建机器人模型并用xacro优化

构建场景
sudo gazebo
将场景保存到world文件夹下(以.world结尾)

构建launch文件

创建功能包my_slam,并加载依赖项roscpp,rospy,std_msgs,urdf,xacro
catkin_create_pkg my_slam roscpp rospy std_msgs urdf xacro
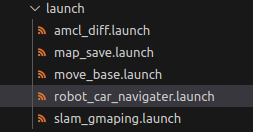
存储 launch 启动文件
mkdir launch
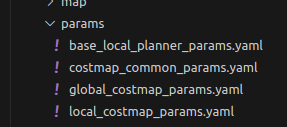
存储params配置文件
mkdir params
存储map文件
mkdir map
构建配置文件
构建启动文件
启动slam建图
进入工作空间(ros_zy)
cd ros_zy
先启动刷新并gazebo
source ./devel/setup.bash
roslaunch my_car robot_car_gazebo.launch
启动slam建图
roslaunch my_slam slam_gmaping.launch
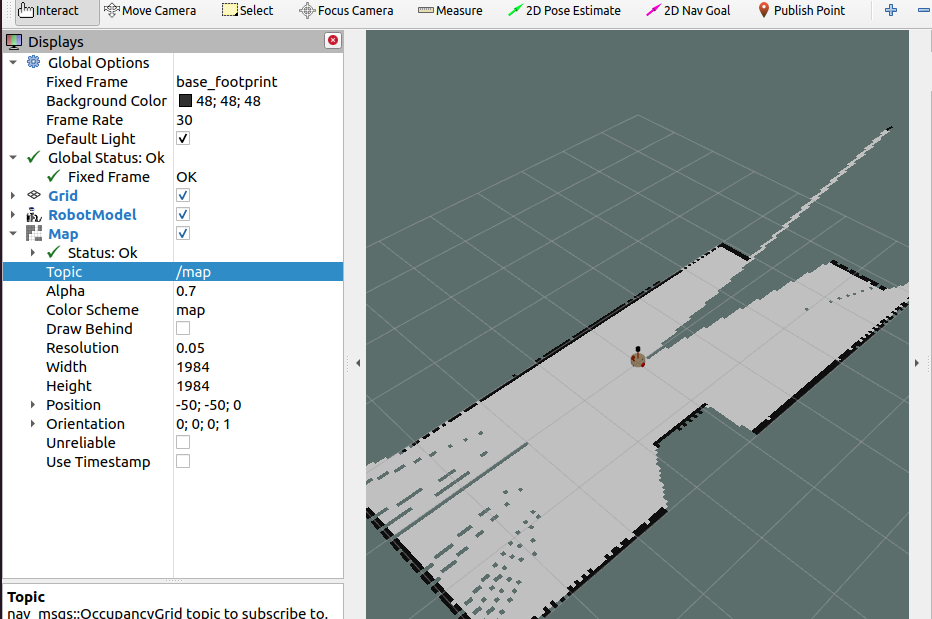
启动rviz并进行配置
rviz
启动键盘控制节点
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
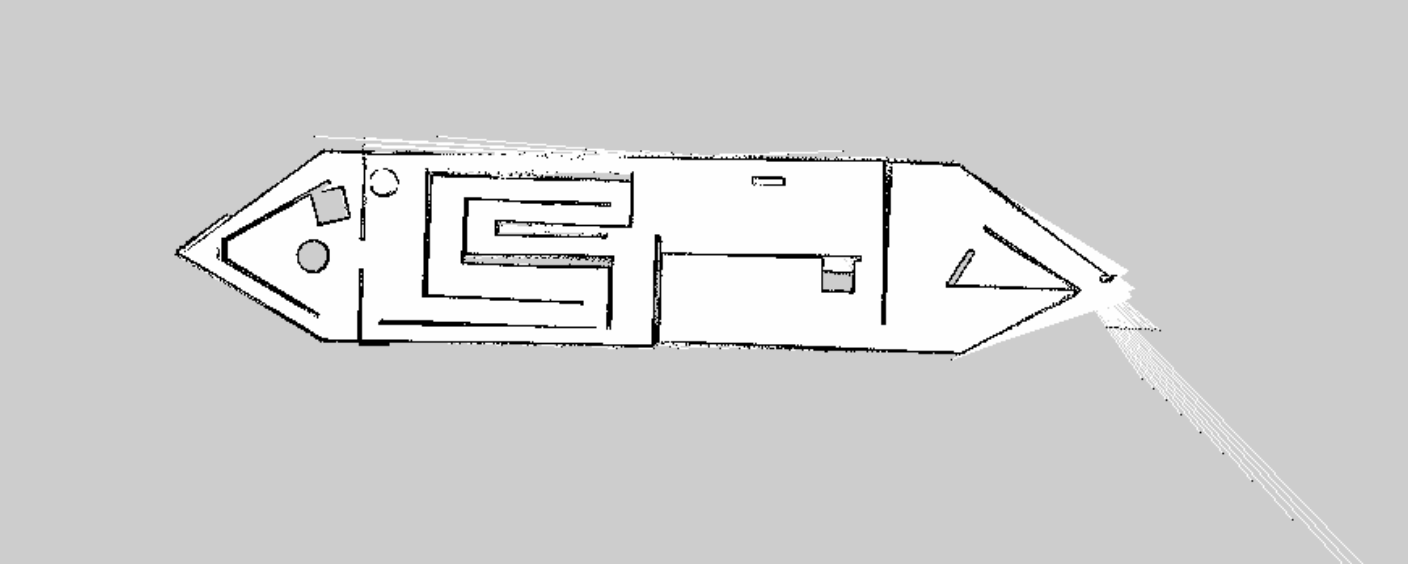
控制建图,结果如下
保存结果
roslaunch my_slam map_save.launch
启动导航
先启动刷新并gazebo
source ./devel/setup.bash
roslaunch my_car robot_car_gazebo.launch
启动导航
roslaunch my_slam robot_car_navigater.launch
Slam建图的图片
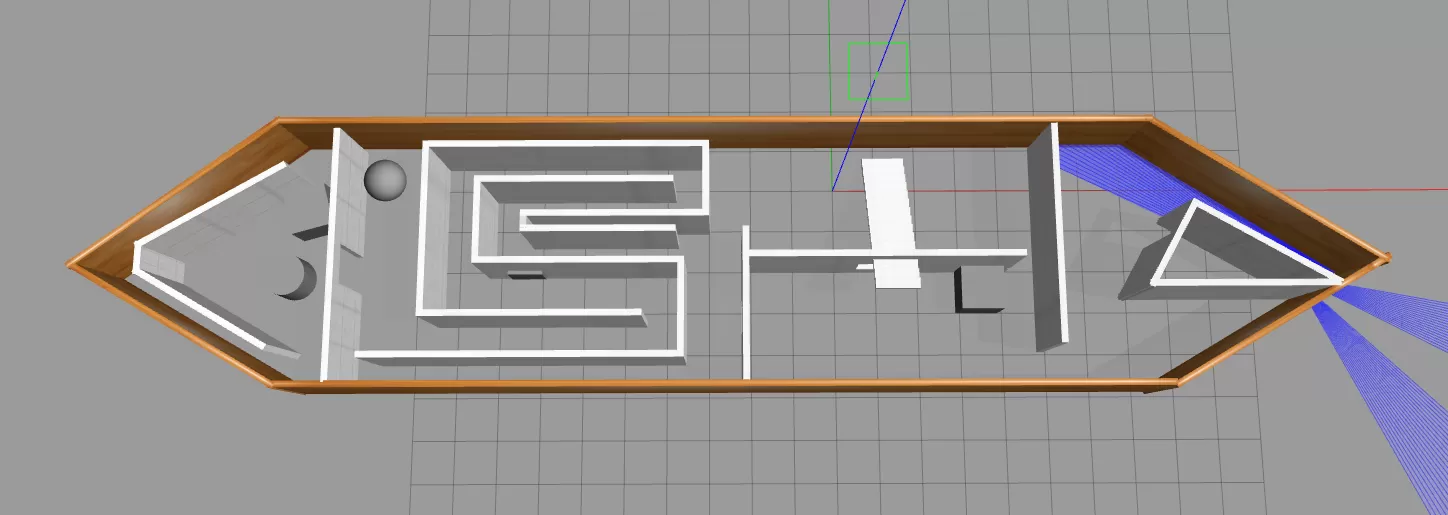
构建好的场景图片
文章来源:https://blog.csdn.net/m0_68319844/article/details/134960350
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!