工程(十六)——自己数据集跑Fast_livo
2023-12-30 05:29:09

一、基础环境
Ubuntu20.04
ROS noetic
PCL 1.8
Eigen 3.3.4
Sophus
git clone https://github.com/strasdat/Sophus.git
cd Sophus
git checkout a621ff
mkdir build && cd build && cmake ..
make
sudo make install下面两个直接把包下载下来一起编译就可以
livox_ros_driver
Vikit
二、编译
git clone https://github.com/uzh-rpg/rpg_vikit.git fast_liv/src
git clone https://github.com/hku-mars/FAST-LIVO fast_liv/src
git clone https://github.com/Livox-SDK/livox_ros_driver.git fastlio2/src
cd fastlio2
catkin_make
source ~/catkin_ws/devel/setup.bash三、运行
下载数据包
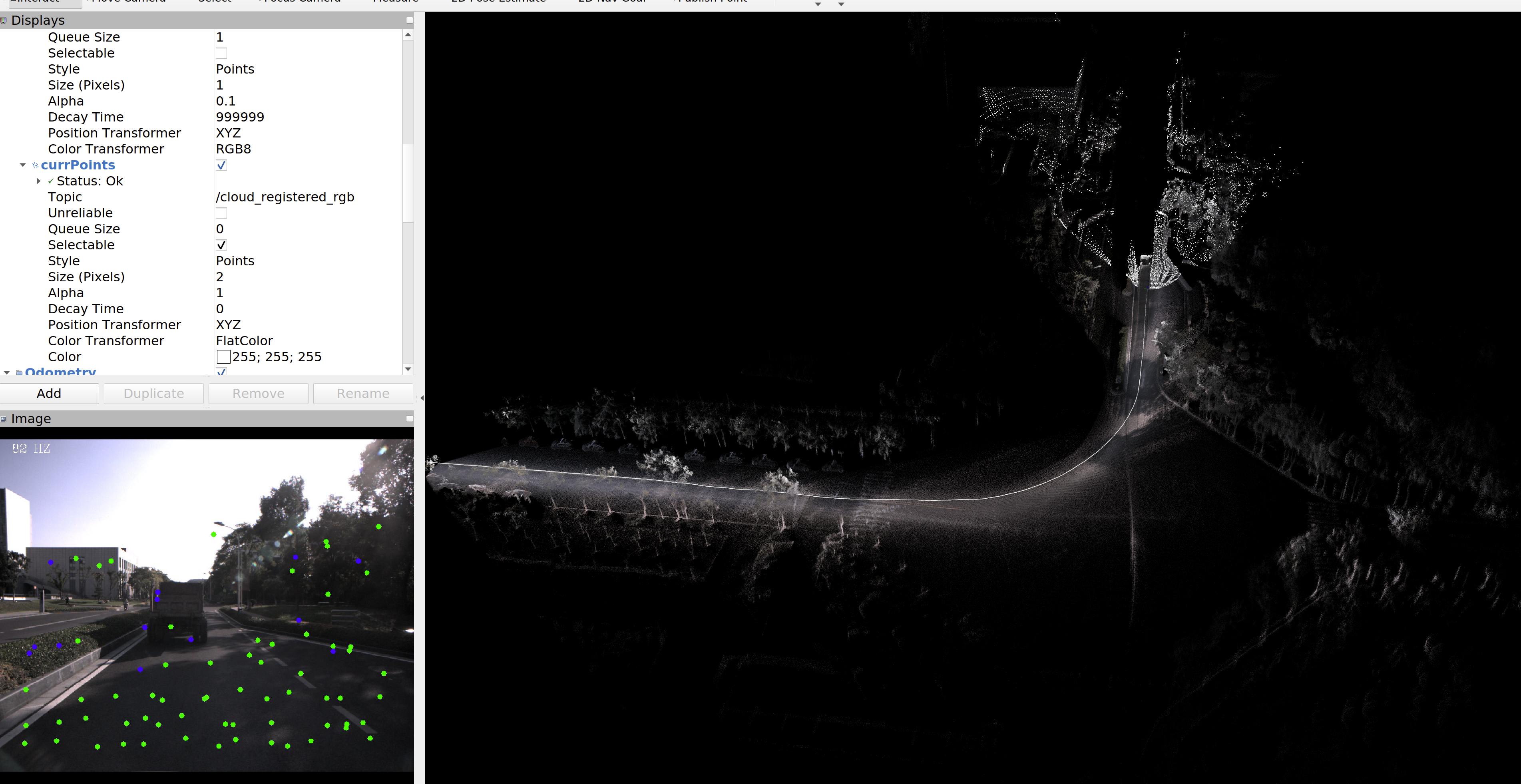
roslaunch fast_livo mapping_avia.launch
rosbag play YOUR_DOWNLOADED.bag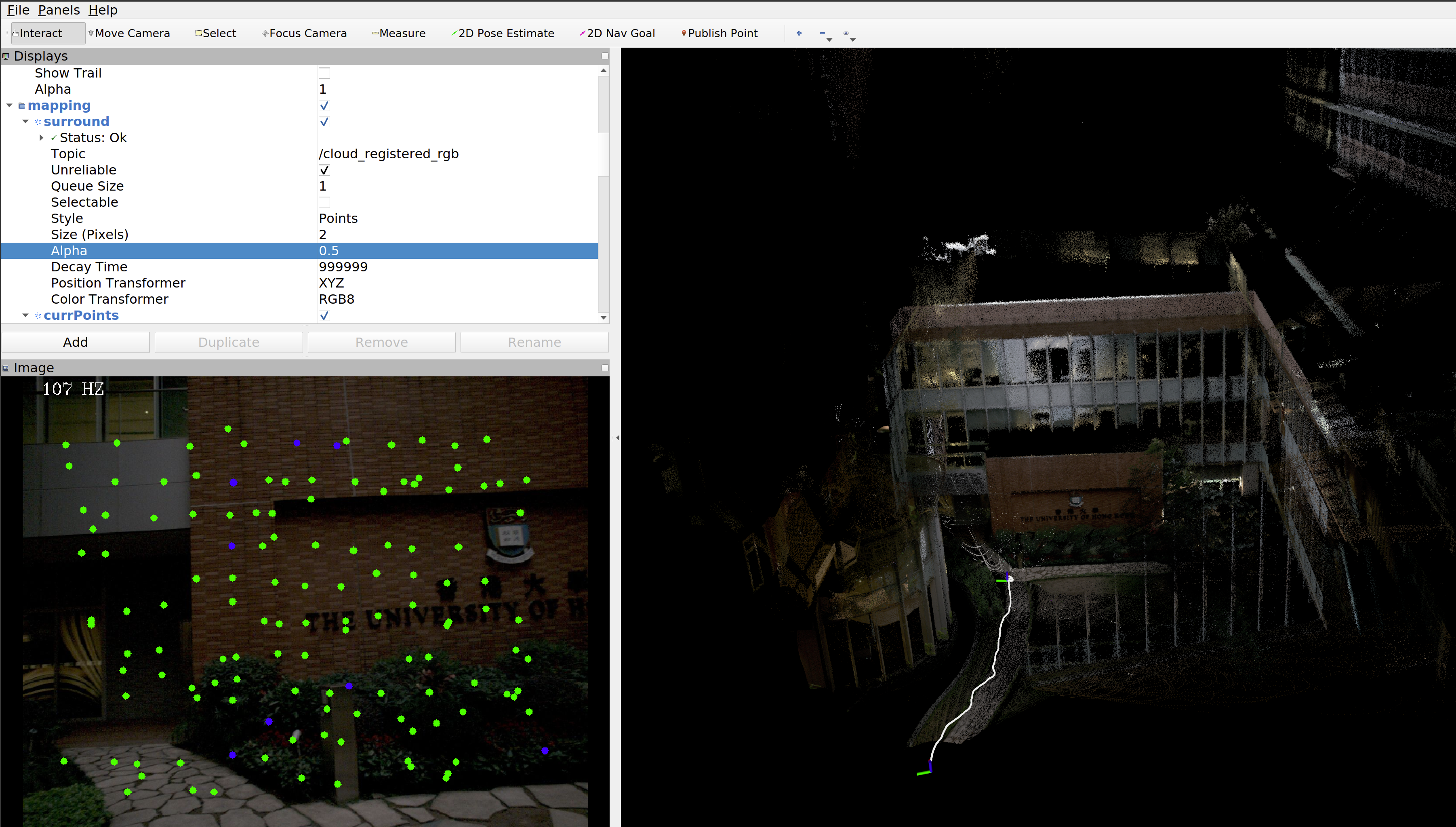
四、跑自己数据集?
关于固态激光雷达和相机的数据集如何建立见之前跑r3live的博客
工程(十三)——从零用自己数据跑R3LIVE_r3live跑自己的数据-CSDN博客
?下面只讲改哪些部分
1.config文件
Fast_liv/src/FAST-LIVO/config 需要改一个avia_resize.yaml和camera_pinhole_resize.yaml
- avia_resize.yaml:主要修改相机的topic 内参和外参



- ?camera_pinhole_resize.yaml:

- launch文件
选择自己的yaml文件和topic名称
 ?之后就可以运行了
?之后就可以运行了
文章来源:https://blog.csdn.net/HUASHUDEYANJING/article/details/135299818
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!