PaddleClas学习3——使用PPLCNet模型对车辆朝向进行识别(c++)
2023-12-14 19:43:39
使用PPLCNet模型对车辆朝向进行识别
1 准备环境
参考上一篇:Windows PaddleSeg c++部署
2 准备模型
2.1 模型导出
对上一篇 使用PPLCNet模型对车辆朝向进行识别 训练得到模型进行转换。将该模型转为 inference 模型只需运行如下命令:
python tools\export_model.py -c .\ppcls\configs\PULC\vehicle_attribute\PPLCNet_x1_0.yaml -o Global.pretrained_model=output/PPLCNet_x1_0/best_model -o Global.save_inference_dir=./deploy/models/class_vehicle_attribute_infer
图2.1 训练得到的模型
图2.2 导出的模型
2.2 修改配置文件
deploy/configs/PULC/vehicle_attribute/inference_vehicle_attribute.yaml
修改Global下的infer_imgs和inference_model_dir。
Global:
infer_imgs: "./images/PULC/vehicle_attribute/0002_c002_00030670_0.jpg"
inference_model_dir: "./models/class_vehicle_attribute_infer"
batch_size: 1
use_gpu: True
enable_mkldnn: True
cpu_num_threads: 10
#benchmark: False
enable_benchmark: False
use_fp16: False
ir_optim: True
use_tensorrt: False
gpu_mem: 8000
enable_profile: False
3 编译
工程整体目录结构如下:
G:/paddle/c++
├── paddle_inference
G:/paddle
├── PaddleClas-release-2.5
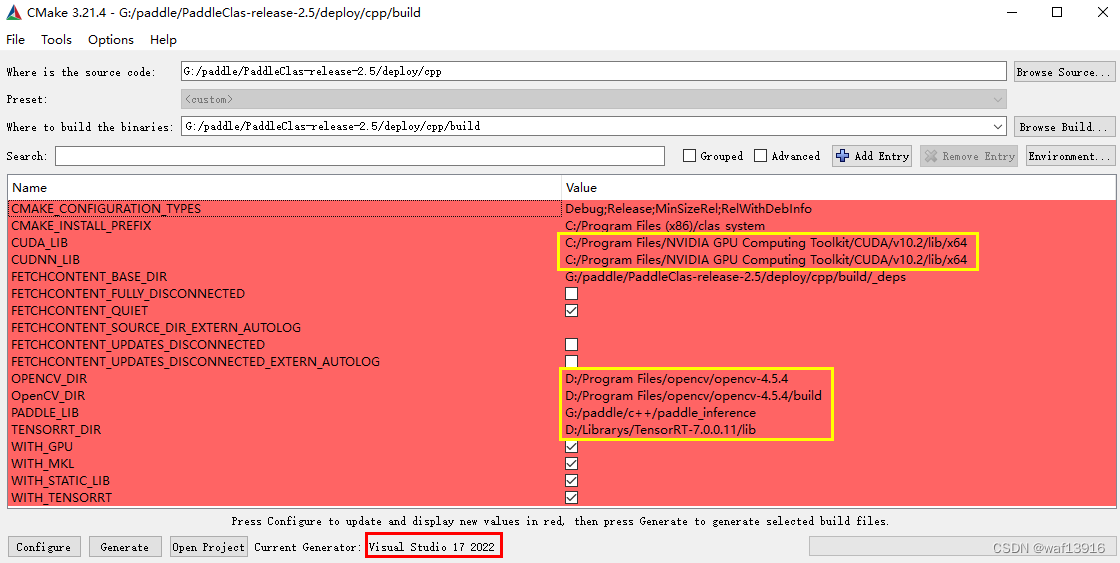
3.1 使用CMake生成项目文件
3.2 编译
用Visual Studio 2022打开cpp\build\clas_system.sln,将编译模式设置为Release,点击生成->生成解决方案,在cpp\build\Release文件夹内生成clas_system.exe。
3.3 执行
进入到build/Release目录下,将准备的模型和图片放到clas_system.exe同级目录,build/Release目录结构如下:
Release
├──clas_system.exe # 可执行文件
├──images # 测试图片
├── PULC
├── vehicle_attribute
├── 0002_c002_00030670_0.jpg
├──configs # 配置文件
├── PULC
├── vehicle_attribute
├── inference_vehicle_attribute.yaml
├──models # 推理用到的模型
├── class_vehicle_attribute_infer
├── inference.pdmodel # 预测模型的拓扑结构文件
├── inference.pdiparams # 预测模型的权重文件
└── inference.pdiparams.info # 参数额外信息,一般无需关注
├──*.dll # dll文件
3.4 添加后处理程序
3.4.1 postprocess.h
// postprocess.h
#include <iostream>
#include <vector>
namespace PaddleClas {
class VehicleAttribute {
public:
float color_threshold = 0.5;
float type_threshold = 0.5;
float direction_threshold = 0.5;
std::vector<std::string> color_list = { "yellow", "orange", "green", "gray", "red", "blue", "white",
"golden", "brown", "black" };
std::vector<std::string> type_list = { "sedan", "suv", "van", "hatchback", "mpv", "pickup", "bus",
"truck", "estate" };
std::vector<std::string> direction_list = { "forward", "sideward", "backward" };
std::string run(std::vector<float>& pred_data);
};
}
3.4.2 postprocess.cpp
// postprocess.cpp
#include "include/postprocess.h"
#include <string>
namespace PaddleClas {
std::string VehicleAttribute::run(std::vector<float>& pred_data) {
int color_num = 10;
int type_num = 9;
int direction_num = 3;
int index_color = std::distance(&pred_data[0], std::max_element(&pred_data[0], &pred_data[0] + 10));//左闭右开
int index_type = std::distance(&pred_data[0] + 10, std::max_element(&pred_data[0] + 10, &pred_data[0] + 19));
int index_direction = std::distance(&pred_data[0] + 19, std::max_element(&pred_data[0] + 19, &pred_data[0] + 22));
std::string color_info, type_info, direction_info;
if (pred_data[index_color] >= this->color_threshold) {
color_info = "Color: (" + color_list[index_color] + ", pro: " + std::to_string(pred_data[index_color]) + ")";
}
if (pred_data[index_type + 10] >= this->type_threshold) {
type_info = "Type: (" + type_list[index_type] + ", pro: " + std::to_string(pred_data[index_type + 10]) + ")";
}
if (pred_data[index_direction + 19] >= this->direction_threshold) {
direction_info = "Direction: (" + direction_list[index_direction] + ", pro: " + std::to_string(pred_data[index_direction + 19]) + ")";
}
std::string pred_res = color_info + type_info + direction_info;
pred_res += "pred: ";
for (int i = 0; i < pred_data.size(); i++) {
if (i < 10) {
if (pred_data[i] > color_threshold) {
pred_res += "1, ";
}
else {
pred_res += "0, ";
}
}
else if (i < 19) {
if (pred_data[i] > type_threshold) {
pred_res += "1, ";
}
else {
pred_res += "0, ";
}
}
else {
if (pred_data[i] > direction_threshold) {
pred_res += "1, ";
}
else {
pred_res += "0, ";
}
}
}
return pred_res;
}
}//namespace
3.4.3 在cls.h中添加函数声明
// Run predictor for vehicle attribute
void Run(cv::Mat& img, std::vector<float>& out_data, std::string &pred_res,
std::vector<double>& times);
3.4.4 在cls.cpp中添加函数定义
void Classifier::Run(cv::Mat& img, std::vector<float>& out_data, std::string& pred_res,
std::vector<double>& times){
cv::Mat srcimg;
cv::Mat resize_img;
img.copyTo(srcimg);
auto preprocess_start = std::chrono::system_clock::now();
this->resize_op_.Run(img, resize_img, this->resize_size_);
//this->resize_op_.Run(img, resize_img, this->resize_short_size_);
//this->crop_op_.Run(resize_img, this->crop_size_);
this->normalize_op_.Run(&resize_img, this->mean_, this->std_, this->scale_);
std::vector<float> input(1 * 3 * resize_img.rows * resize_img.cols, 0.0f);
this->permute_op_.Run(&resize_img, input.data());
auto input_names = this->predictor_->GetInputNames();
auto input_t = this->predictor_->GetInputHandle(input_names[0]);
input_t->Reshape({ 1, 3, resize_img.rows, resize_img.cols });
auto preprocess_end = std::chrono::system_clock::now();
auto infer_start = std::chrono::system_clock::now();
input_t->CopyFromCpu(input.data());
this->predictor_->Run();
auto output_names = this->predictor_->GetOutputNames();
auto output_t = this->predictor_->GetOutputHandle(output_names[0]);
std::vector<int> output_shape = output_t->shape();
int out_num = std::accumulate(output_shape.begin(), output_shape.end(), 1,
std::multiplies<int>());
out_data.resize(out_num);
output_t->CopyToCpu(out_data.data());
auto infer_end = std::chrono::system_clock::now();
auto postprocess_start = std::chrono::system_clock::now();
pred_res = this->vehicle_attribute_op.run(out_data);
auto postprocess_end = std::chrono::system_clock::now();
std::chrono::duration<float> preprocess_diff =
preprocess_end - preprocess_start;
times[0] = double(preprocess_diff.count() * 1000);
std::chrono::duration<float> inference_diff = infer_end - infer_start;
double inference_cost_time = double(inference_diff.count() * 1000);
times[1] = inference_cost_time;
std::chrono::duration<float> postprocess_diff =
postprocess_end - postprocess_start;
times[2] = double(postprocess_diff.count() * 1000);
}
3.4.5 在main.cpp中调用
EFINE_string(config,
"./configs/PULC/vehicle_attribute/inference_vehicle_attribute.yaml", "Path of yaml file");
DEFINE_string(c,
"", "Path of yaml file");
int main(int argc, char** argv) {
google::ParseCommandLineFlags(&argc, &argv, true);
std::string yaml_path = "";
if (FLAGS_config == "" && FLAGS_c == "") {
std::cerr << "[ERROR] usage: " << std::endl
<< argv[0] << " -c $yaml_path" << std::endl
<< "or:" << std::endl
<< argv[0] << " -config $yaml_path" << std::endl;
exit(1);
}
else if (FLAGS_config != "") {
yaml_path = FLAGS_config;
}
else {
yaml_path = FLAGS_c;
}
ClsConfig config(yaml_path);
config.PrintConfigInfo();
std::string path(config.infer_imgs);
std::vector <std::string> img_files_list;
if (cv::utils::fs::isDirectory(path)) {
std::vector <cv::String> filenames;
cv::glob(path, filenames);
for (auto f : filenames) {
img_files_list.push_back(f);
}
}
else {
img_files_list.push_back(path);
}
std::cout << "img_file_list length: " << img_files_list.size() << std::endl;
Classifier classifier(config);
std::vector<double> cls_times = { 0, 0, 0 };
std::vector<double> cls_times_total = { 0, 0, 0 };
double infer_time;
std::vector<float> out_data;
std::string result;
int warmup_iter = 5;
bool label_output_equal_flag = true;
for (int idx = 0; idx < img_files_list.size(); ++idx) {
std::string img_path = img_files_list[idx];
cv::Mat srcimg = cv::imread(img_path, cv::IMREAD_COLOR);
if (!srcimg.data) {
std::cerr << "[ERROR] image read failed! image path: " << img_path
<< "\n";
exit(-1);
}
cv::cvtColor(srcimg, srcimg, cv::COLOR_BGR2RGB);
classifier.Run(srcimg, out_data, result, cls_times);
std::cout << "Current image path: " << img_path << std::endl;
infer_time = cls_times[0] + cls_times[1] + cls_times[2];
std::cout << "Current total inferen time cost: " << infer_time << " ms."
<< std::endl;
std::cout << "Current inferen result: " << result << " ."
<< std::endl;
if (idx >= warmup_iter) {
for (int i = 0; i < cls_times.size(); ++i)
cls_times_total[i] += cls_times[i];
}
}
if (img_files_list.size() > warmup_iter) {
infer_time = cls_times_total[0] + cls_times_total[1] + cls_times_total[2];
std::cout << "average time cost in all: "
<< infer_time / (img_files_list.size() - warmup_iter) << " ms."
<< std::endl;
}
std::string presion = "fp32";
if (config.use_fp16)
presion = "fp16";
if (config.benchmark) {
AutoLogger autolog("Classification", config.use_gpu, config.use_tensorrt,
config.use_mkldnn, config.cpu_threads, 1,
"1, 3, 224, 224", presion, cls_times_total,
img_files_list.size());
autolog.report();
}
return 0;
}
4 模型预测
4.1 测试结果

图 4.1 输入图像

图4.2 预测结果
4.2 与python预测结果对比
python deploy\python\predict_cls.py -c .\deploy\configs\PULC\vehicle_attribute\inference_vehicle_attribute.yaml -o Global.pretrained_model=output/PPLCNet_x1_0/best_model

文章来源:https://blog.csdn.net/u014377655/article/details/134859690
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!