基于信道探测(Channel Sounding)的新一代低功耗蓝牙高精度测距技术原理详解
目录
3. BLE HADM步骤一:设备同步 Synchronization
1. 介绍
在现今高度数字化与互联网普及的社会背景下,基于位置的服务(Location Based Service,LBS)需求日益增长。随着物联网(Internet of Things,IoT)、智能设备以及无线通信技术的迅猛发展,室内定位系统(Indoor Positioning System,IPS)已逐渐成为诸如商场导航、仓库管理、工业自动化、智能医疗中心以及紧急情况预警等多种应用场景的核心技术。
目前能够提供IPS服务的无线通信技术一般有:蓝牙(特别是低功耗蓝牙BLE),超宽带(UWB),WiFi等。和其他无线技术相比,BLE具有低功耗、低成本、易部署、易于现有个人消费终端直接通信等优点,目前出货量显著上升,已成为IPS中最重要的无线方案[1],[2]。
现有BLE能够提供的定位服务主要是基于RSSI(Received Signal Strength Indicator)和DF(Direction Finding)这两大类。RSSI是基于接收信号能量的一种无线测距技术,在任何版本的BLE设备上都支持。但由于该技术容易受到多径等室内通信干扰,一般工业级产品的定位精度都在米级。少量学术界的论文在指纹、机器学习等算法加持下,能够实现米级以内的定位精度。但很难在低成本、大规模部署的工业场景复现[2]。DF技术是在蓝牙规范5.1版本后支持的测向/定位技术。利用该技术实现测向/定位时,需要在接收端或者是在发射端引入多天线阵列。天线阵列在接收端的系统称为AoA(Angle of Arrival),而在发射端的系统称为AoD(Angle of Departure)。该技术不管在工业界和学术界都可以复现分米级别的定位精度 [2]。但是,BLE DF需要高精度的天线阵列,使得设备在尺寸、实际部署等因素上都存在较多限制。另外,BLE DF的高精度定位区域也有限,一般可以高精度定位半径近似为部署层高,而大规模部署又受制于天线阵列引入后的成本。因此在折中考虑成本、部署难度、尺寸、实际定位精度等因素后,BLE DF技术没有达到预期流行的效果。
为了实现低成本、易部署、高精度的IPS系统,Bluetooth标准一直在寻找新的高精度测距技术(HADM: High Accuracy Distance Measurement)。目前引入Bluetooth草案,并预计在新的规范中发布实施的HADM技术是一种基于相位的测距技术,被称为蓝牙信道探测(Channel Sounding)[3]。目前主流BLE芯片方案商都已完成基于该技术的测距验证,最高可以实现10cm级别的测距精度 [4]。
本文将详细介绍蓝牙信道探测技术实现高精度测距的原理。
2. BLE HADM步骤
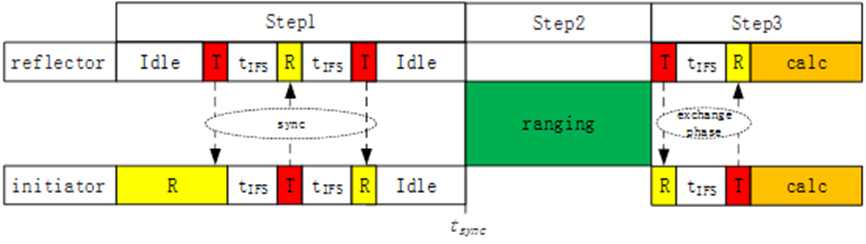
根据Bluetooth规范草案 [4] 和实际芯片厂商 [5] 实施的步骤来看,BLE HADM主要分为三步:同步、跳频相位测量、计算距离,如Fig. 1所示。
在BLE HADM过程中,完成测距的一对设备被称为发起设备(initiator)和反射设备(reflector)。类似的定义,可以参考BLE连接态下的Master和Slave设备。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!