LiDAR 城市模型的 3D Python 工作流
1.引言
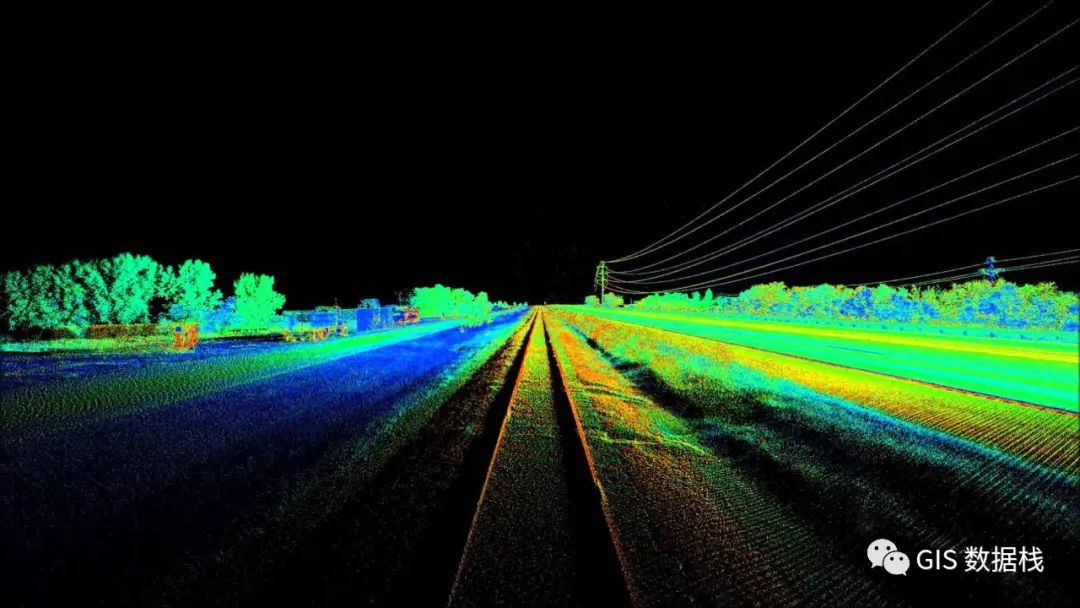
LiDAR(Light Detection and Ranging)是一种通过测量激光束从发射到返回的时间来测量距离,从而生成物体的三维表面模型的技术。这种技术在城市建模中具有广泛的应用,可以用于城市规划、环境监测、交通仿真等领域。而使用Python处理LiDAR点云数据则具有高效、灵活和可扩展性等优点,可以大大简化数据处理和建模的流程。

2.数据获取
从数据供应商或公开数据集中获取LiDAR点云数据的步骤包括:
?下载数据:可以使用Python的标准库urllib来下载数据。下面是一个简单的例子:
import urlliburl = 'http://example.com/data.las'filename = 'data.las'response = urllib.request.urlopen(url)with open(filename, 'wb') as code:while True:chunk = response.read(1024)if not chunk:breakcode.write(chunk)
?解压缩数据:可以使用Python的标准库gzip或zipfile来解压缩.gz或.zip文件。下面是一个简单的例子:
import gzipwith gzip.open('data.gz', 'rb') as f_in:with open('data.las', 'wb') as f_out:shutil.copyfileobj(f_in, f_out)
?读取数据:可以使用点云库PCL或Open3D来读取.las或.ply等点云数据格式。下面是一个使用Open3D库的例子:
import?open3d?as?o3dpcd = o3d.io.read_point_cloud("data.ply")
3.数据预处理
LiDAR点云数据通常会存在噪音、异常值、遮挡等问题,需要进行数据预处理,以消除这些问题,得到更准确的三维模型。数据预处理的步骤包括:数据清理、滤波、分割、分类等。这些步骤需要使用点云库,例如PCL或Open3D,以及使用Python的其他数据处理库,例如numpy或scipy。
4.数据可视化
Python有很多可视化库可供选择,如matplotlib、Plotly等。这些库可以用来将点云数据呈现为图形或图表,以便更好地理解和分析点云数据。例如,可以使用matplotlib来绘制点云数据的三维散点图或表面图,也可以使用Plotly来创建交互式的三维图形。
5.数据建模
在数据建模阶段,可以使用Python的数据建模库来构建模型,以自动分类或识别点云数据中的特征。这些模型可以基于传统的机器学习算法,例如支持向量机(SVM)或随机森林(Random Forest),或者基于深度学习算法,例如卷积神经网络(CNN)或循环神经网络(RNN)。使用深度学习算法需要大量的训练数据和计算资源。
6.城市模型生成
城市模型生成是将点云数据转换为城市模型的过程。这个过程需要使用Python的城市建模库来实现。这些库提供了各种工具和功能来将点云数据转换为三维城市模型,并支持添加语义信息和其他属性。例如,可以使用Citygml库来创建三维城市模型,并添加建筑物的高度、宽度、长度等属性信息。
7.数据输出和部署
最后,将生成的城市模型导出为通用的数据格式,例如.OBJ、.FBX等,并将其部署到各种应用中,例如城市规划、虚拟现实、游戏开发等。这个步骤需要使用城市模型处理库和文件格式转换库来实现。例如,可以使用Pyglet库将城市模型转换为.obj格式,并使用OpenGL进行可视化显示。
完整代码下载:
链接:https://pan.xunlei.com/s/VNl3K4iD5zMWg4Dffd7N_ifIA1
提取码:2wcw
复制这段内容后打开手机迅雷App,查看更方便
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!