ROS Arbotix实例演示
Arbotix?是一款控制电机、舵机的硬件控制板,并提供相应的 ros 功能包,是一款基于 ROS的机器人控制系统,它旨在为小型机器人提供硬件控制和传感器接口,以便于机器人的运动和感知。
并且Arbotix?提供了一个差速控制器,通过接收速度控制指令来更新机器人的里程计状态。这个差速控制器在 arbotix_python 程序包中,完整的 arbotix 程序包还包括多种控制器,分别对应 dynamixel 电机、多关节机械臂以及不同形状的夹持器。
Arbotix的主要作用:
????硬件接口:Arbotix为ROS提供了一个与机器人硬件交互的接口。它允许开发者通过ROS消息和服务轻松地控制和监控硬件状态。
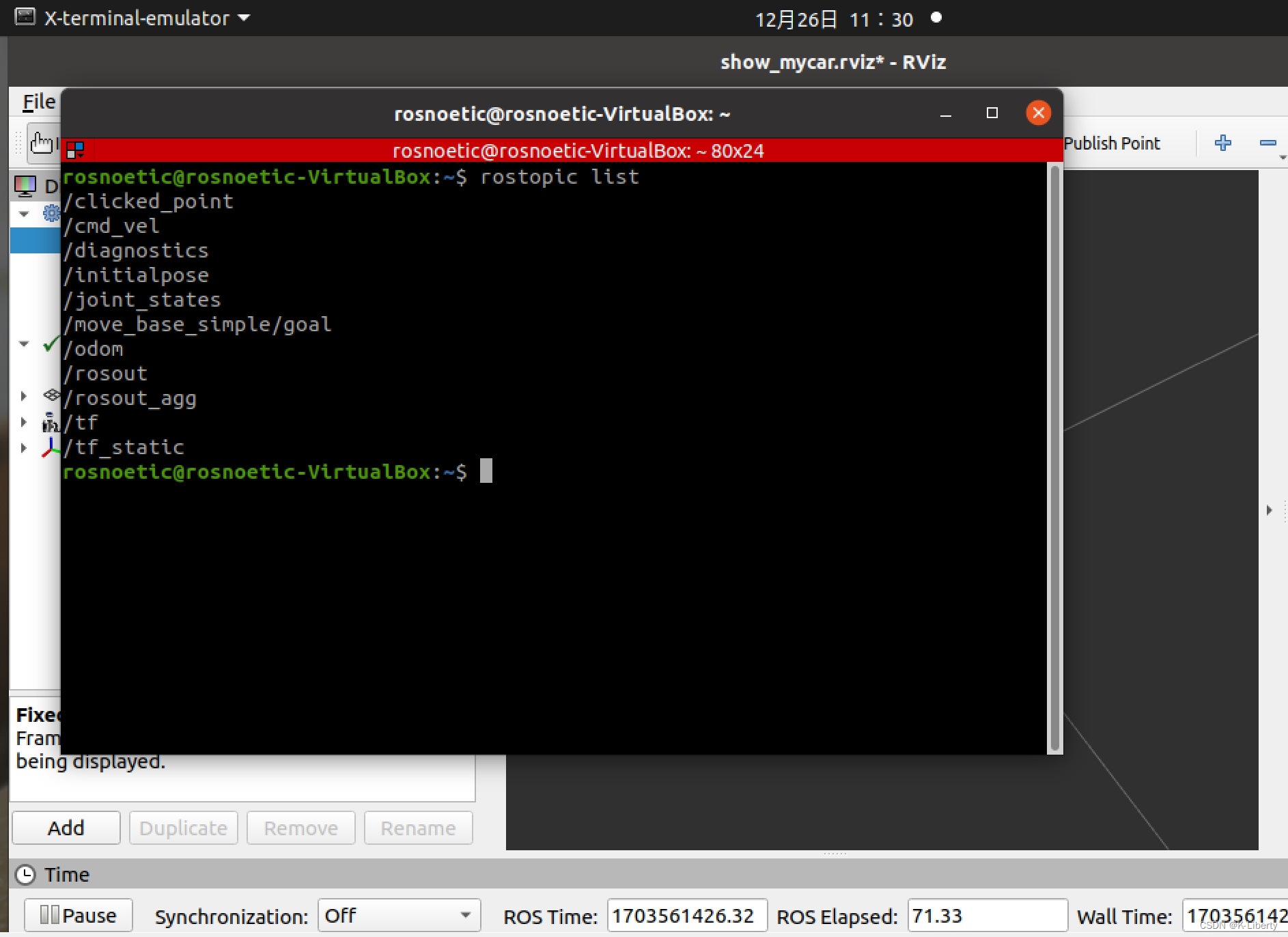
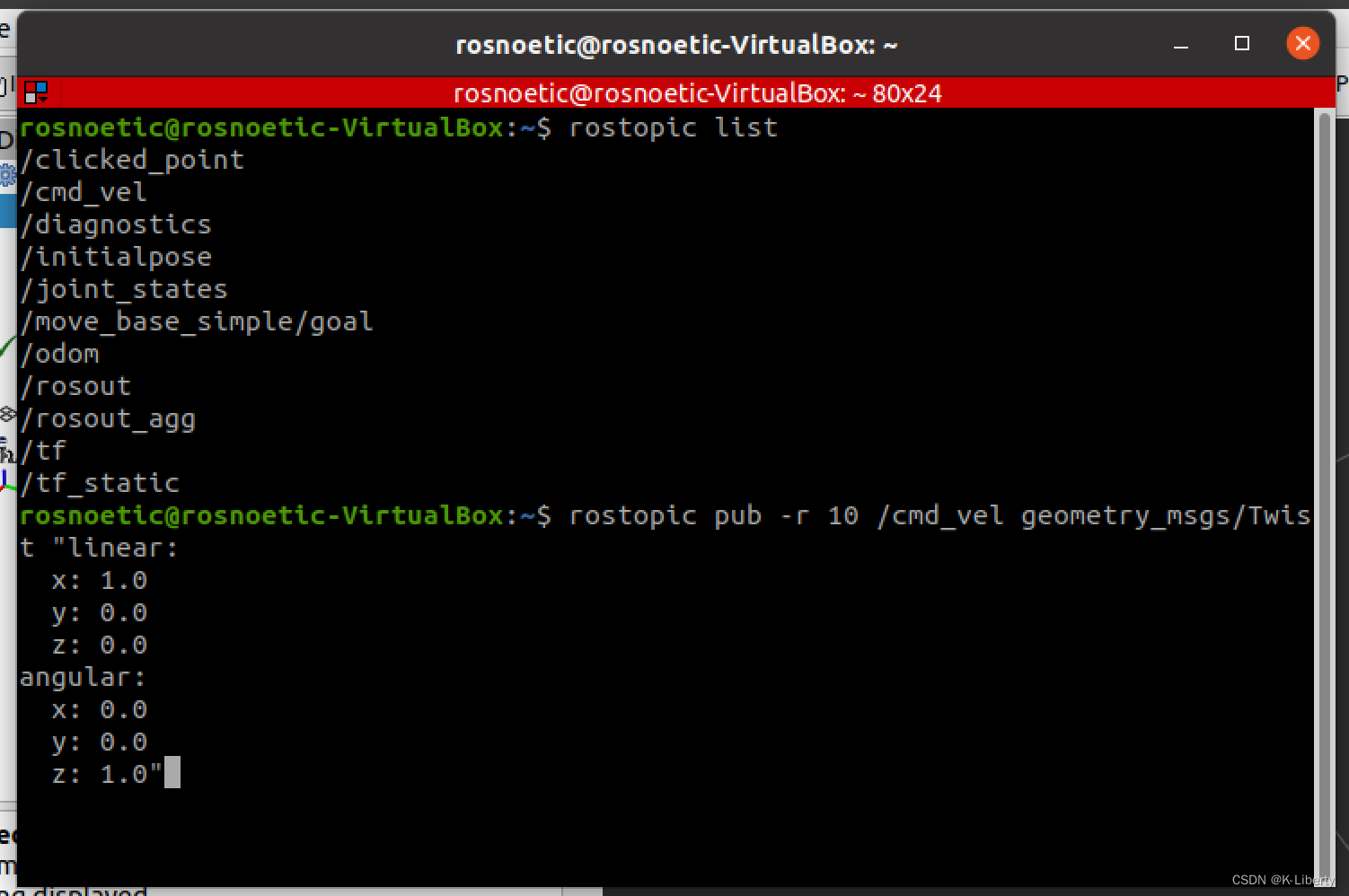
????运动控制:Arbotix包包含了驱动机器人关节运动的功能。它可以接受来自ROS的/cmd_vel命令,解析这些命令,并将它们转化为实际的电机或伺服电机的控制信号,从而驱动机器人的运动。
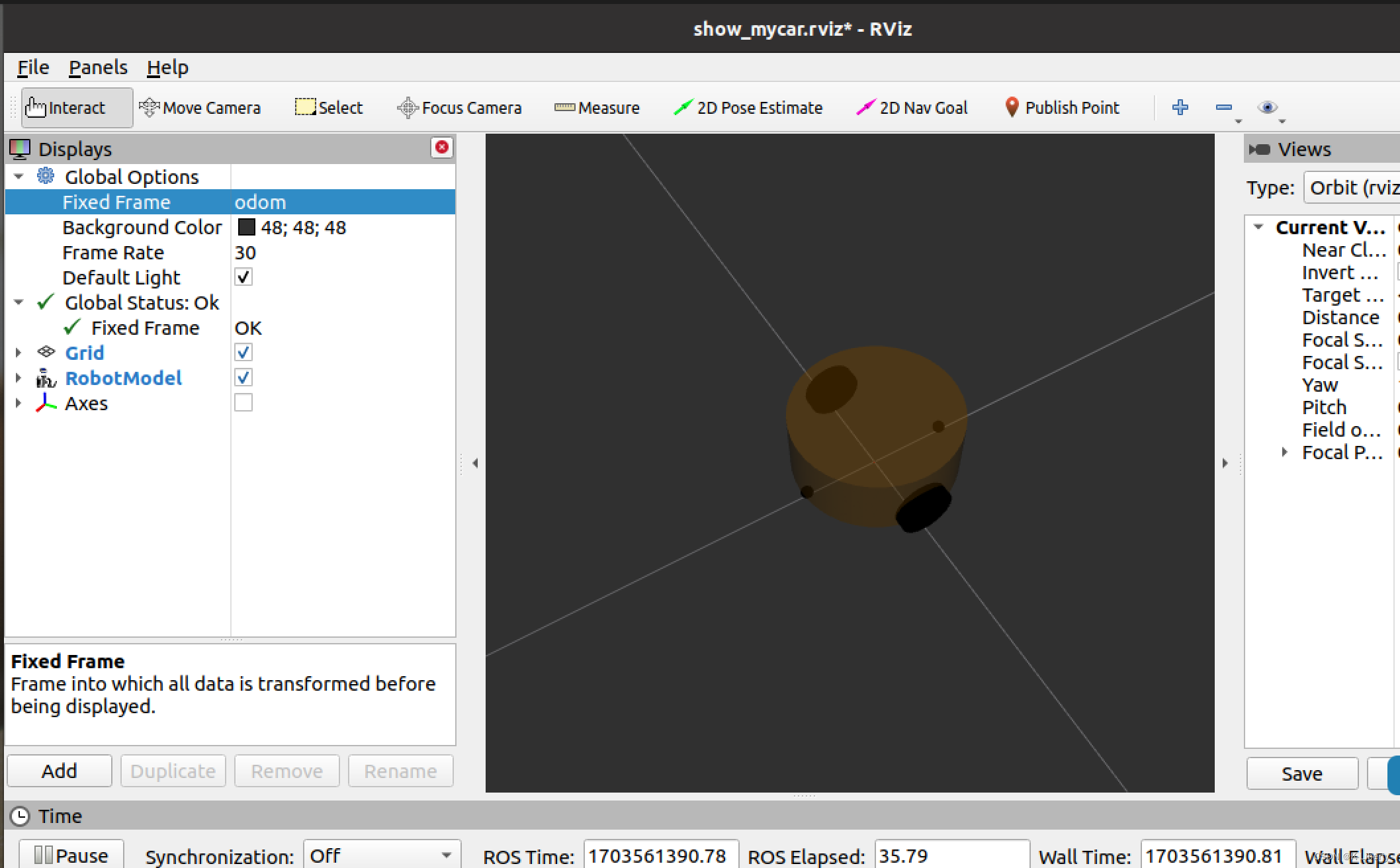
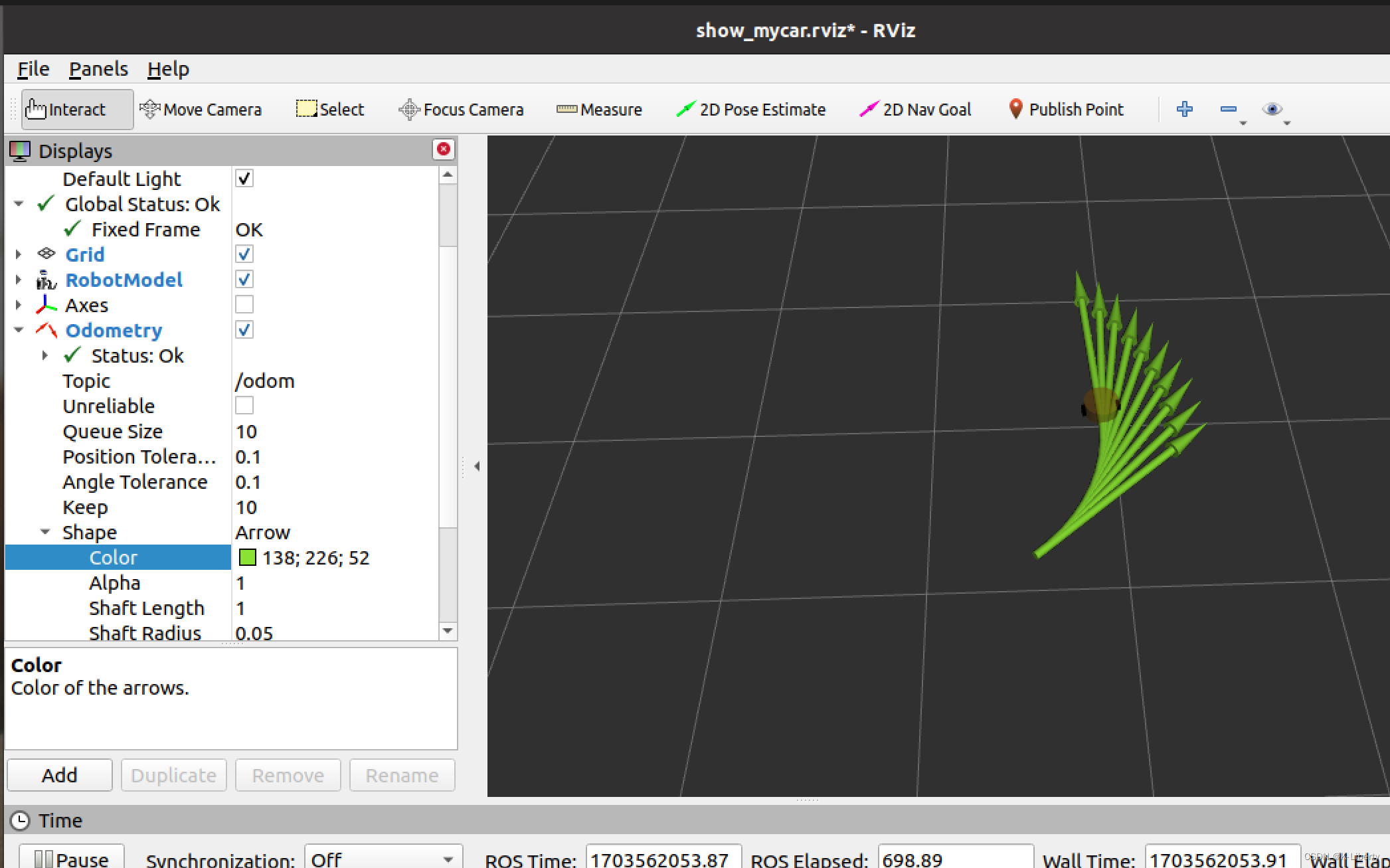
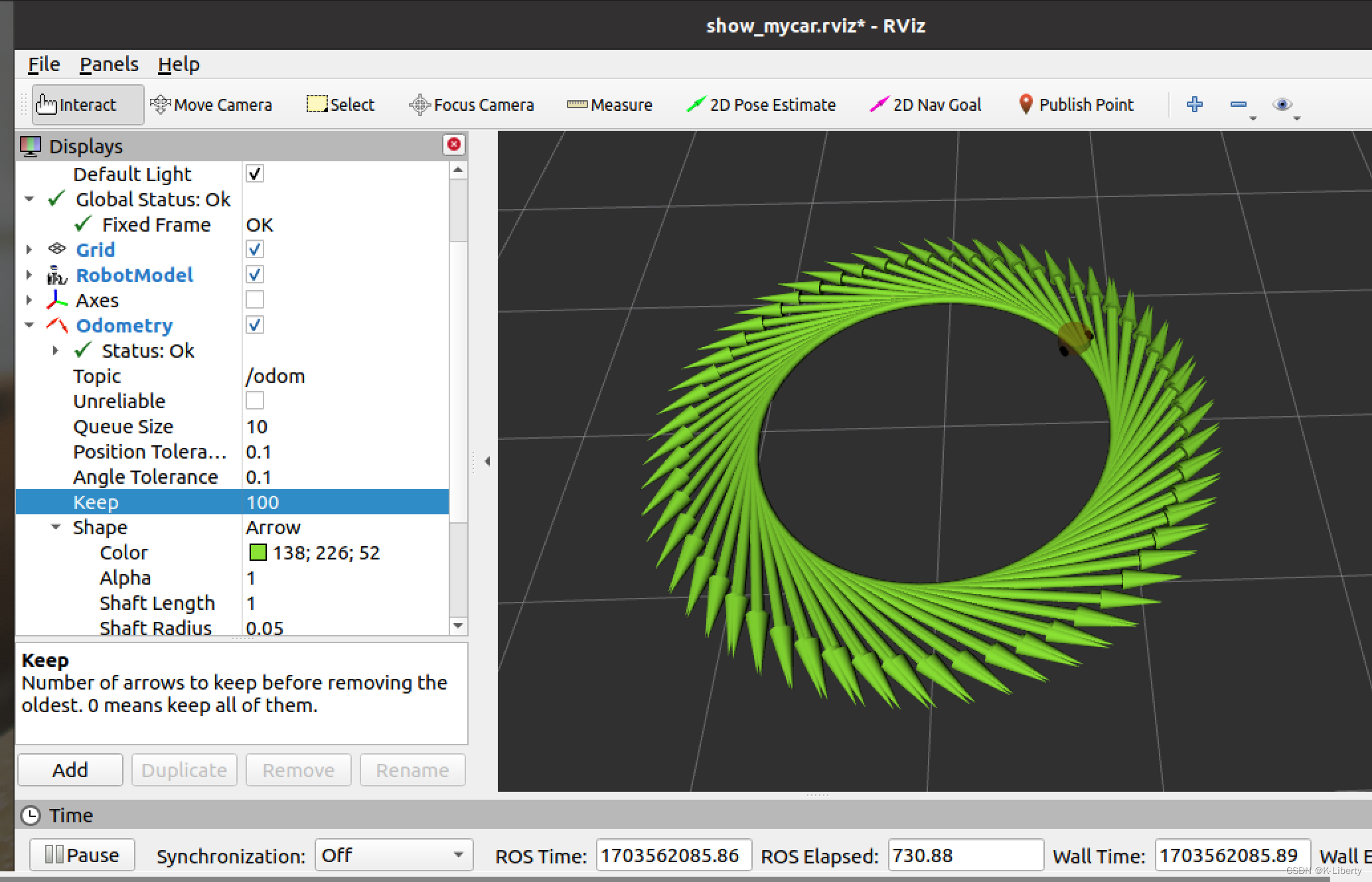
????仿真与实机测试:Arbotix不仅可用于真实的硬件设备控制,还可以在ROS的模拟环境rviz中进行仿真。这使得开发者在没有实际硬件的情况下也能进行软件开发和测试。
????URDF支持:Arbotix与URDF文件配合使用,URDF文件描述了机器人的机械结构和关节属性。这使得ROS能够理解机器人的物理特性,并据此进行运动规划和控制。
????灵活性:由于ROS的模块化设计,Arbotix可以与其他ROS节点和包集成,实现更复杂的机器人功能,如导航、感知和行为控制。
总的来说,ROS Arbotix的作用是作为一个中间件,连接ROS的高级运动控制指令和底层的机器人硬件,使得开发者能够更方便、更高效地开发和调试机器人系统。
目的: 将控制上一篇的机器人模型在 rviz 中做圆周运动
实例实现流程:
1.安装 Arbotix
2、创建新功能包,准备机器人 urdf、xacro 文件
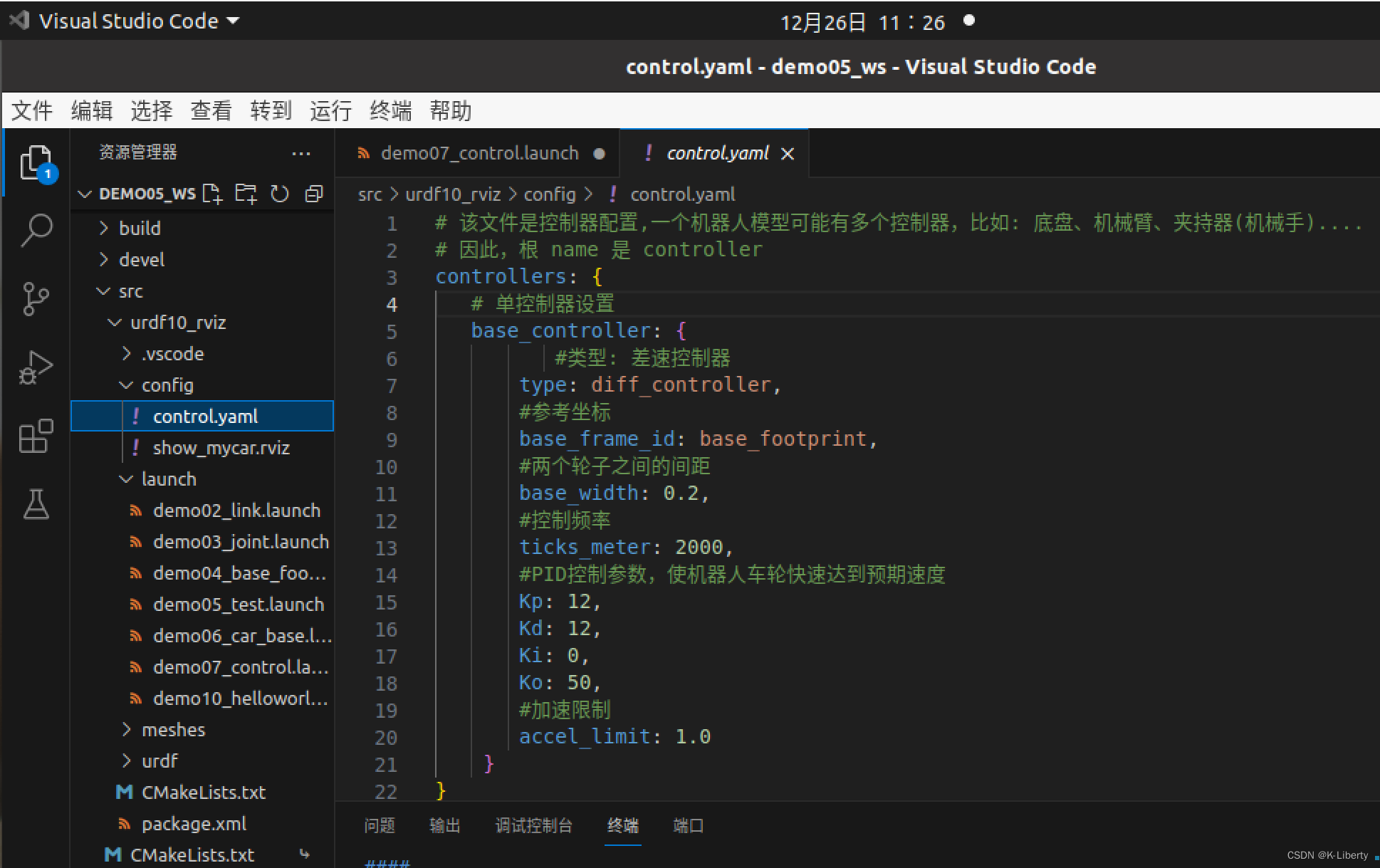
3、添加 Arbotix 配置文件
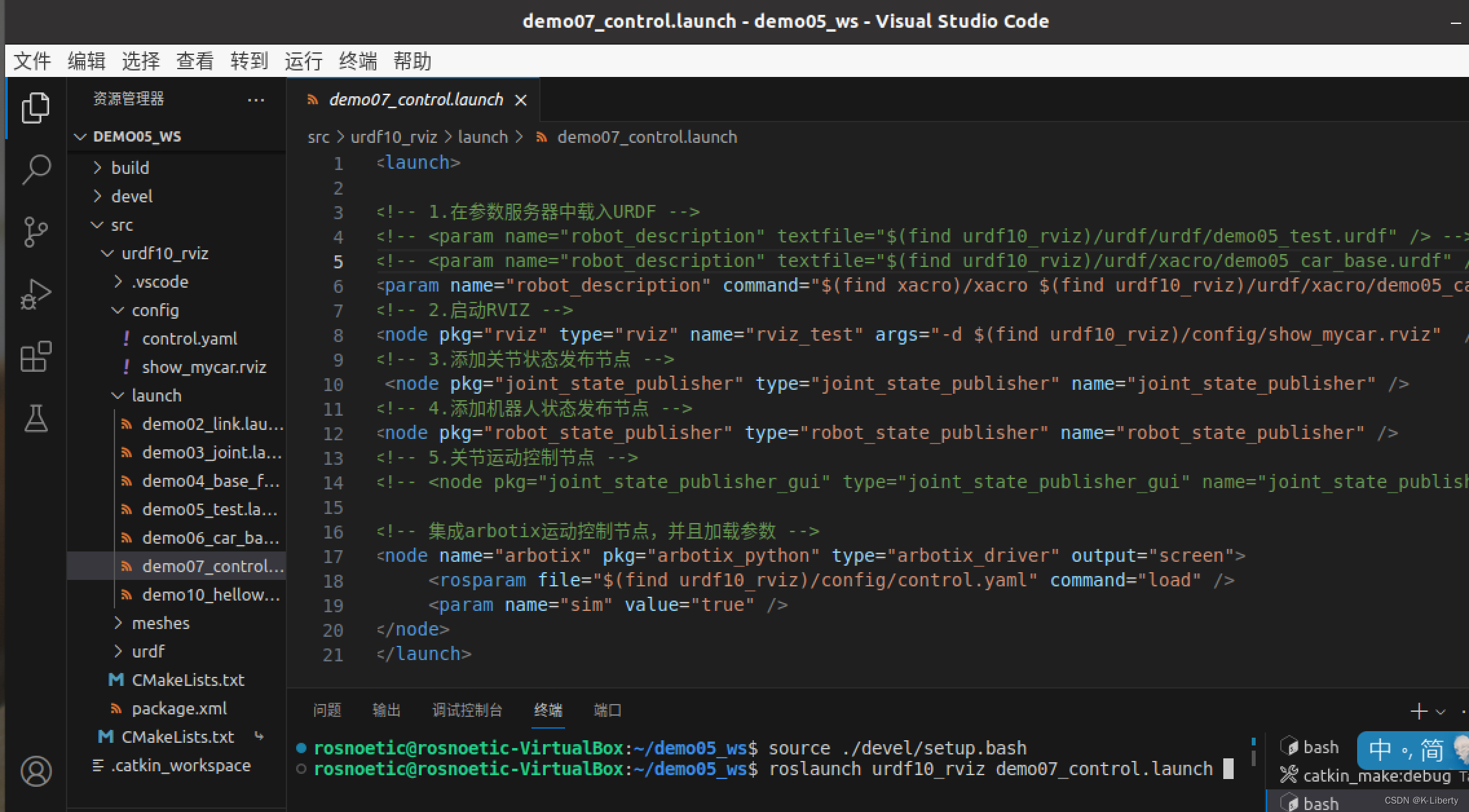
4、编写 launch 文件配置 Arbotix
5、启动 launch 文件并控制机器人模型运动

<param> 在仿真环境下,需要配置 sim 为 true
PID控制参数主要包括以下基本参数:
1. Kp (比例增益或比例系数):
????Kp决定了系统对误差(设定值与实际值之间的差异)的直接反应程度。
????增大Kp可以加快系统的响应速度,使其更快地接近设定值。
????然而,过大的Kp可能导致系统出现振荡或超调。
2. Ki (积分增益或积分系数):
????Ki用于消除系统的稳态误差(长时间存在的误差)。
????它通过累积过去的误差并将其纳入控制输出来发挥作用。
????增大Ki可以帮助减少或消除系统的稳态误差,但过大的Ki可能导致系统响应变慢或出现震荡。
3. Kd (微分增益或微分系数):
????Kd反映了系统对未来误差变化的预测和抑制能力。
????它基于误差的变化率(导数)来调整控制输出。
????增大Kd可以增加系统的阻尼效果,减少超调和震荡,提高系统的稳定性。
4.Ko (输出增益或缩放因子):
???Ko用于调整PID控制器的总体输出范围或幅度。
???它可以将PID控制器的输出信号按比例放大或缩小,以适应执行器或被控过程的实际需求。
这些参数的具体值需要根据系统的特性和控制性能要求进行调整和优化,以达到理想的动态响应和稳定性能。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!