最小二乘法的简介及应用实例
系统辨识是现代控制理论中最重要的分支之一,主要用于获取系统模型或者系统参数,是反馈控制的基础。最小二乘法是系统辨识中最常用的一种方法,在无人机系统的设计和控制中常常被用到。本文将给出最小二乘法的简要介绍,帮助大家对该方法有一个基本的了解,然后介绍如何利用最小二乘对三轴加速度计进行标定。
最小二乘法的来源:
最小二乘法(Least Squares method),又称最小平方法,起源于十八世纪的大航海探索时期,发展于天文领域和航海领域[1]。法国科学家勒让德于1805年首先提出了最小二乘法,后来在1822年由高斯证明了最小二乘法的优越性,也就是高斯-马尔可夫定理[1]。现在最小二乘法已被普遍应用于误差估计、曲线拟合、参数辨识、预测、预报等领域[2]。
理解最小二乘法:
为了帮助大家直观理解最小二乘法,我们以一个简单的例子,介绍最小二乘法的思想。
假设下面这20个数据是你用同一把尺子测量20次水杯高度的数据,每次的测量都是有误差的,那么水杯的高度到底是多少呢?
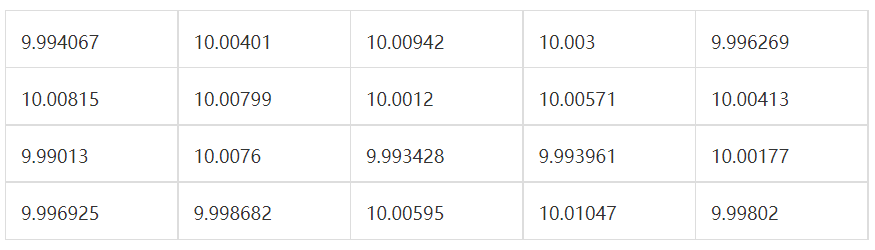
表120次水杯高度的测量值
一般情况下我们可以用数据的平均值作为水杯的高度:

利用上面的数据可求得高度的平均值为10.0015cm。
让我们用最小二乘法来思考刚才的问题。先将上面的数据画在坐标系中,如下图所示,其中红色虚线为水杯高度的估计值。

图1 20次高度测量值
则这20次测量的残差为:
![]()
由于绝对值计算起来比较麻烦,可以用残差的平方替代绝对值,则总(平方)误差为:

当估计值变化时,总误差也会变化。最小二乘法的思路是:让总误差最小的就是最小二乘估计(Least Squares Estimation)。
公式(3)是一个关于的二次函数,当其导数为0时取最小值[3]:

可求得令总误差最小的值是10.0015。
三轴加速度计的标定:
三轴加速度计有两种常用的标定方法,一种借助转台设备进行标定,该方法操作简单,标定准确,但需要额外购买设备,成本较高;另一种方法则不需要外部的标定设备,但精度略微差。本部分将介绍如何利用最小二乘法对加速度计进行数据的标定以提高其测量准确性。
三轴加速度计的测量精度受非正交误差、零漂、尺度因子等多源误差的影响,在标定时需要首先建立包含这些误差的输出方程。
1)首先考虑非正交误差,示意图如图2所示,相应的误差矩阵为式(5)。

图2 非正交误差示意图[4]

2)尺度因子误差为加速度计输出量与输入量的比值,定义沿三个正交轴的尺度因子为、和,则尺度因子矩阵为:

3)零漂误差指静态情况下加速度计的输出,定义沿三个正交轴的零漂为、和,则零漂矩阵为:

综合上述各误差矩阵,可得到加速度计的多源误差测量模型,其方程如式(8)所示。

其中为标定前的原始数据(观测数据),为标定后的数据。
待辨识的参数共9个:

这里最小二乘法辨识利用的原理是:在静止状态下,无论角度值如何变化,加速度计三个轴测得的重力加速度矢量与当地重力加速度矢量的模值相等[4]。
根据这个原理,我们可以求得的最小二乘估计:

为当地重力加速度值,为观测值的数量,一般情况下应远大于待辨识参数的个数。
至此,利用最小二乘法标定三轴加速度计的思路已经介绍完毕,式(10)的求解可以使用最速下降法、高斯牛顿法、遗传算法等最优求解的方法进行计算。
总结:
控制系统中参数辨识是一个基础而又重要的问题,本文简要介绍了系统辨识中常用的最小二乘法,并通过一个例子帮助大家理解最小二乘法的思路,然后讲解了如何利用最小二乘对三轴加速度计进行标定,感兴趣的同学可以私信留言交流哦!
参考资料
[1]?https://en.wikipedia.org/wiki/Least_squares
[2]邹乐强.最小二乘法原理及其简单应用[J].科技信息,2010,(23):282-283.
[3]?https://blog.csdn.net/ccnt_2012/article/details/81127117
[4] 邹泽兰,徐祥,徐同旭,赵鹤鸣.一种基于改进型自适应遗传算法的MEMS三轴加速度计标定方法[J].传感技术学报,2020,33(10):1450-1456.
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!