使用opencv+tesseract识别图片中的表格
2023-12-25 14:39:38
描述
在java环境中使用opencv和tesserac识别一个图片表格
环境:opencv和tesseract安装在linux环境下,docker将运行springboot服务
opencv和tesseract的安装和docker加载可参考之前的文章
过程
将图片进行预处理,过滤掉颜色等干扰元素
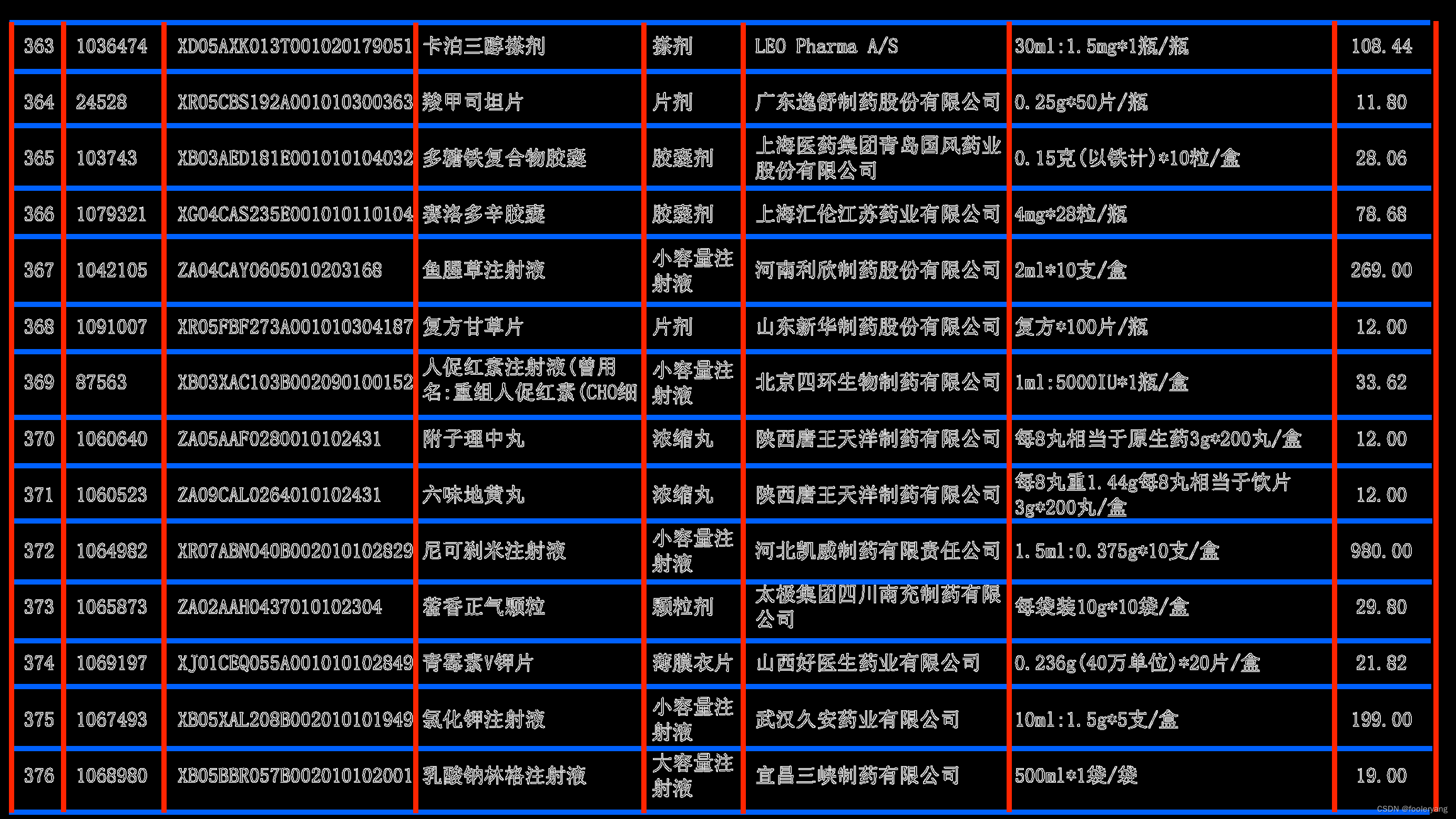
提取图片的水平线和垂直线,并进行重叠过滤
得到水平线和垂直线的交点,根据交点构建单元格
对每个单元格进行识别
1.转换
将image转换成mat
private Mat bufferedImageToMat(BufferedImage bufferedImage) {
Mat mat = new Mat();
try {
// Convert BufferedImage to byte array
ByteArrayOutputStream byteArrayOutputStream = new ByteArrayOutputStream();
ImageIO.write(bufferedImage, "png", byteArrayOutputStream);
byteArrayOutputStream.flush();
byte[] imageInByte = byteArrayOutputStream.toByteArray();
byteArrayOutputStream.close();
// Convert byte array to Mat
MatOfByte matOfByte = new MatOfByte(imageInByte);
mat = Imgcodecs.imdecode(matOfByte, Imgcodecs.IMREAD_UNCHANGED);
} catch (IOException e) {
e.printStackTrace();
}
return mat;
}2.图片预处理
原图:

将图片灰度化,并进行边缘检测
灰度化
//image为加载的图片
Mat imread = bufferedImageToMat(image);
Mat gray = new Mat();
Imgproc.cvtColor(imread, gray,Imgproc.COLOR_BGR2GRAY);边缘检测
Mat edges = new Mat();
Imgproc.Canny(gray, edges, 50, 150);
3.检测水平线和垂直线
识别水平线和垂直线
List<MatOfPoint> verticalLines = new ArrayList<>();
List<MatOfPoint> horizontalLines = new ArrayList<>();
for (int i = 0; i < lines.rows(); i++) {
double[] val = lines.get(i, 0);
if (isVertical(val)) {
verticalLines.add(new MatOfPoint(new Point(val[0], val[1]), new Point(val[2], val[3])));
} else if (isHorizontal(val)) {
horizontalLines.add(new MatOfPoint(new Point(val[0], val[1]), new Point(val[2], val[3])));
}
}水平线和垂直线的阈值可根据实际情况调节?
private boolean isVertical(double[] line) {
// 实现判断线是否垂直的逻辑
return Math.abs(line[0] - line[2]) < 1.0; // 这里的阈值需要根据实际情况调整
}
private boolean isHorizontal(double[] line) {
// 实现判断线是否水平的逻辑
return Math.abs(line[1] - line[3]) < 1.0; // 这里的阈值需要根据实际情况调整
}
?
4.重叠过滤
过滤掉相邻太近,应该为同一条线的线段
private List<MatOfPoint> overlappingFilter(List<MatOfPoint> lines, int sortingIndex) {
List<MatOfPoint> uniqueLines = new ArrayList<>();
// 按照 sortingIndex 进行排序
if(sortingIndex == 0){
//行,检查y坐标
lines.sort(Comparator.comparingDouble(line -> calculateLineCenter(line).y));
}else{
//列检查x坐标
lines.sort(Comparator.comparingDouble(line -> calculateLineCenter(line).x));
}
double distanceThreshold = 5;
for (int i = 0; i < lines.size(); i++) {
MatOfPoint line1 = lines.get(i);
Point[] pts1 = line1.toArray();
// 如果 uniqueLines 为空或当前线与最后一条线不重复,则添加到 uniqueLines 中
if (uniqueLines.isEmpty() || !isDuplicate(pts1, uniqueLines.get(uniqueLines.size() - 1).toArray(), distanceThreshold)) {
uniqueLines.add(line1);
}
}
return uniqueLines;
}
private Point calculateLineCenter(MatOfPoint line) {
Point[] pts = line.toArray();
return new Point((pts[0].x + pts[1].x) / 2, (pts[0].y + pts[1].y) / 2);
}5.水平线和垂直线的焦点
得到水平线和垂直线的焦点
List<List<Point>> intersectionList = new ArrayList<>();//交点列表
for (MatOfPoint hLine : horizontalLines) {
List<Point> intersectionRow = new ArrayList<>();
for (MatOfPoint vLine : verticalLines) {
Point intersection = getIntersection(hLine, vLine);
intersectionRow.add(intersection);
}
intersectionList.add(intersectionRow);
}
获取两条线的焦点
private Point getIntersection(MatOfPoint line1, MatOfPoint line2) {
Point[] points1 = line1.toArray();
Point[] points2 = line2.toArray();
double x1 = points1[0].x, y1 = points1[0].y, x2 = points1[1].x, y2 = points1[1].y;
double x3 = points2[0].x, y3 = points2[0].y, x4 = points2[1].x, y4 = points2[1].y;
double det = (x1 - x2) * (y3 - y4) - (y1 - y2) * (x3 - x4);
double x = ((x1 * y2 - y1 * x2) * (x3 - x4) - (x1 - x2) * (x3 * y4 - y3 * x4)) / det;
double y = ((x1 * y2 - y1 * x2) * (y3 - y4) - (y1 - y2) * (x3 * y4 - y3 * x4)) / det;
return new Point(x, y);
}6.构建单元格
List<List<Rect>> cells = new ArrayList<>();
// 构建单元格
for (int i = 0; i < intersectionList.size() - 1; i++) {
List<Rect> rowCells = new ArrayList<>();
for (int j = 0; j < intersectionList.get(i).size() - 1; j++) {
Point p1 = intersectionList.get(i).get(j);
Point p2 = intersectionList.get(i).get(j + 1);
Point p3 = intersectionList.get(i + 1).get(j);
Rect cell = new Rect((int) p1.x, (int) p1.y, (int) (p2.x - p1.x), (int) (p3.y - p1.y));
rowCells.add(cell);
}
cells.add(rowCells);
}7.对每个单元格进行识别
for(int i=0;i<cells.size();i++){
List<String> row = new ArrayList<>();
for(int j=0;j<cells.get(i).size();j++){
Rect cell = cells.get(i).get(j);
Mat cellImage = new Mat(gray, cell);
BufferedImage bufferedImage = matToBufferedImage(cellImage);
if(bufferedImage == null)continue;
String text = tess.doOCR(bufferedImage);
row.add(text);
}
} private BufferedImage matToBufferedImage(Mat mat) {
int type = BufferedImage.TYPE_BYTE_GRAY;
if (mat.channels() > 1) {
type = BufferedImage.TYPE_3BYTE_BGR;
}
int bufferSize = mat.channels() * mat.cols() * mat.rows();
byte[] buffer = new byte[bufferSize];
mat.get(0, 0, buffer); // 获取所有像素值
BufferedImage image = new BufferedImage(mat.cols(), mat.rows(), type);
final byte[] targetPixels = ((DataBufferByte) image.getRaster().getDataBuffer()).getData();
System.arraycopy(buffer, 0, targetPixels, 0, buffer.length);
return image;
}
文章来源:https://blog.csdn.net/hey_lie/article/details/135196773
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!