自动驾驶中的“雷达”
自动驾驶中有好几种雷达,新手可能会混淆,这里统一介绍一下它们。
首先,所有雷达的原理都是发射波,接收回波(可能是声波或电磁波),并通过发射和接收的时间差以及波的速度计算距离。只不过发射的波不同,功能也不同。
激光雷达? Lidar
Lidar,Light Detection And Ranging 是激光探测及测距系统的简称,主要构成要素包括发射系统、接收系统和信号处理系统。
激光雷达主动发射波长约为900-1500nm的激光射线,波长短
激光雷达的文章网上太多了,这里贴一个质量比较好的
毫米波雷达? Radar
millimeter-wave radar
国际电信联盟(ITU)发布的《无线电规则》(2020 年)和我国《无线电频率划分规定》中,将无线电频率在 30-300GHz 的频段(波长 1-10mm)称呼为毫米波频段。

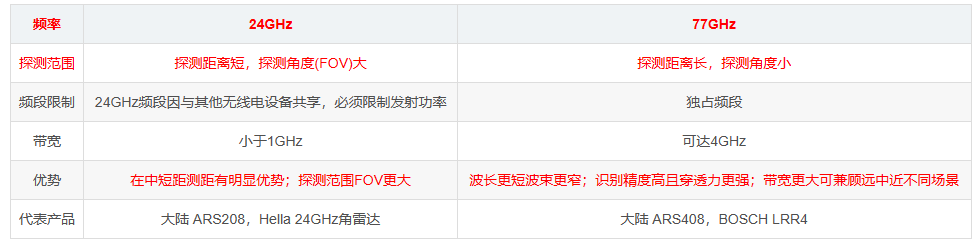
毫米波雷达使用的电磁波波长介于1-10mm,波长短、频段宽,比较 容易实现窄波束,雷达分辨率高,不易受干扰。目前国内使用的 24GHz、60GHz、77GHz、80GHz 等雷达产品统归为毫米波雷达。


在车载毫米波雷达中,目前主要有三种调制方案:调频连续波(Frequency Modulated Continuous Wave, FMCW),频移键控(Frequency Shift Keying, FSK)以及相移键控(Phase Shift Keying, PSK)。
主流车载毫米波雷达所采用的的调制信号为调频连续波FMCW。
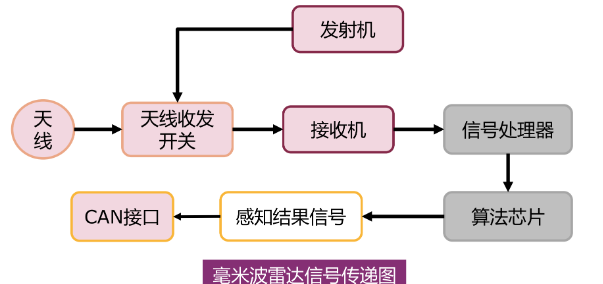
其基本原理是在发射端发射一个频率随时间变化的信号,经目标反射后被接收机接收,通过反射信号和接收信号之间的混频,得出两个信号的频率差,随后通过电磁波传播公式和多普勒效应公式求出目标距离和速度。
测量角度是通过计算不同天线单元之间的延时差来计算。
毫米波雷达的三个基本功能即为测距,测速,测角,由于测距精度较高,AEB常用毫米波雷达来做。
毫米波雷达的成本一般在几千元不等。
毫米波雷达一般通过CAN接入。
所谓4D毫米波雷达,是通过测量目标的距离、速度、方位角和高度,对目标进行精准辨别。
相比于激光雷达,毫米波雷达的优势是成本低,体积小,受恶劣天气的影响更小。毫米波雷达是L0~L2的ADAS功能中十分常用的传感器。
超声波雷达?USS
USS,Ultrasonic Sensor System,检测原理是发射超声波,检测回波,通过时间差测距。这也是蝙蝠所使用的测距原理。
关于超声波雷达的原理、分类和安装示意我之前写过一篇简单的文章
超声波雷达理论上对所有能够反射超声波的物体管用,包括固体和液体,但是如果目标物体是一个有角度的、能够将声波反射向其他角度的平面,或者是能够吸收超声波的海绵、泡沫等物体,超声波雷达的检测能力会受到影响。
按照检测距离,主要分为两类:LRU(Long Range Unit),检测距离通常在30-500cm,也有的能够超过700cm,检测角度较小,通常作为APA(Active Park Assist System)传感器安装在车身侧面;SRU(Short Range Unit),检测距离通常在15-250cm,通常作为UPA(Ultrasonic Park Assist System)传感器安装在前后保险杠。
一般的工作频率分为40kHz、48kHz和58kHz三种。频率越高其灵敏度越高,但是水平与垂直方向的探测角度就越小,所以常常使用的是40kHz的探头。超声波雷达防水、防尘,即使有少量的泥沙遮挡也不影响。探测范围在0.1-3米之间,而且精度较高,因此非常适合应用于泊车。车上的小圆点就是它。
超声波雷达的成本极低,最低可能在10元左右。
所谓倒车雷达一般也指超声波雷达。
超声波雷达一般通过CAN接入。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!