模糊-神经网络控制 原理与工程应用(绪论)
绪论
模糊和确定系统
????????在客观世界中,系统可分为确定性系统和模糊性系统,前者可用精确数学模型加以描述,而后者则不能。
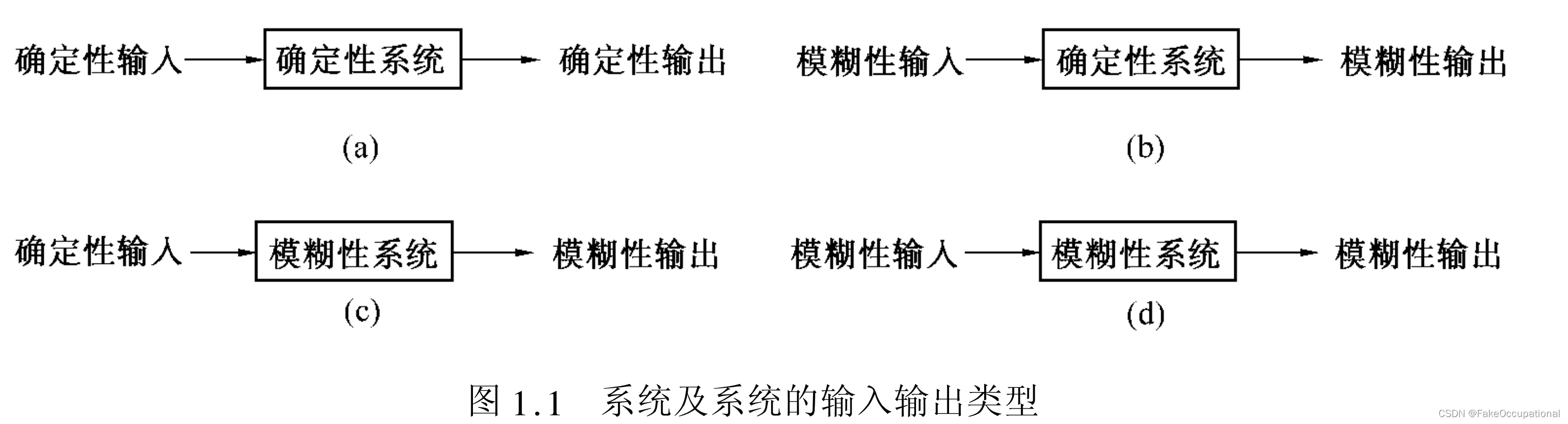
输入输出类型
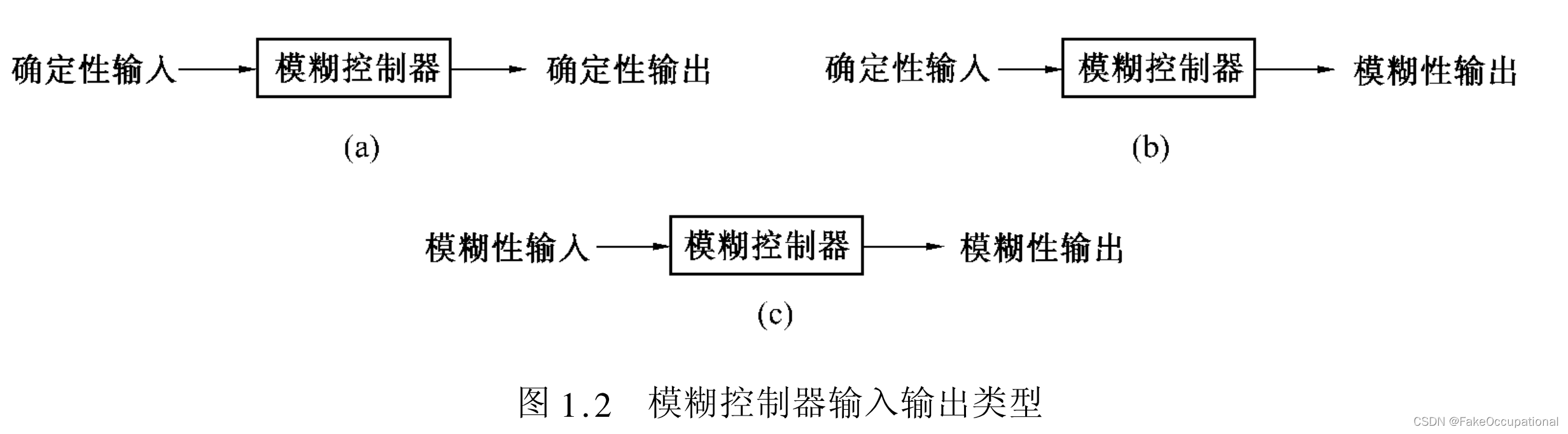
????????(b)的模糊性输出可通过反模糊化转换成图 1.2(a)的形式。这样,有两种类型的模糊控制器,即具有确定性输入输出的模糊控制器和具有模糊性输入输出的模糊控制器。前者是针对复杂的系统,将其确定性的输入进行模糊化处理,最后得到确定性结果;后者就是针对客观世界中的模糊性输入,采用模糊处理方法,得到模糊性输出结果,其过程没有模糊性和确定性的转换。本书主要针对具有确定性输入输出的模糊控制器进行讨论。
1.3.1 模糊控制系统的非线性逼近能力----------------------------------------------------------------------------------------5
1.3.2 模糊控制器的数学本质----------------------------------------------------------------------------------------------------6
????????直到20世纪80年代末的时期,人们才开始真正关注模糊控制器数学本质的研究。在这个阶段,Silber、Ying和Buckley等学者首次对具有线性规则的模糊控制器进行了数学探索(Silber,Ying,1989;Buckley和Ying,1989)。随后,他们证明了一种称为Mamdani的简单模糊控制器的数学本质,该控制器具有两个线性输入模糊子集、四条规则、Zadeh的"AND-OR"算子组合以及采用重心法进行反模糊化(Ying,Silber,Buckley,1990)。他们进一步将这一研究推广到其他推理方法下的各类Mamdani模糊控制器,指出基于不同推理方法的简单模糊控制器实际上是不同的非线性PI(比例积分)控制器,其增益是可变的(Ying,1993)。这一研究成果为模糊控制理论的发展提供了重要的数学基础。
????????李洪兴首次对具有三角形隶属函数、真值流推理和重心法反模糊化的模糊控制器进行了数学本质的分析(李洪兴,1995)。他指出模糊控制器实际上是一种插值器,其中SISO(Single Input Single Output)模糊控制器可以被看作是分段线性插值器,而DISO(Double Input and Single Output)模糊控制器则是乘积型分片线性插值器。在这种插值器中,模糊控制规则中的隶属函数充当插值的基函数。随后,李洪兴进一步证明了具有Mamdani型控制规则、采用"max-min"蕴涵关系和合成算法、以及采用单点模糊化和重心法反模糊化的常见模糊推理算法,都可以视为某种插值器(李洪兴,1998)。他指出,模糊控制方法在数学物理领域中相当于有限元法,是经典控制论或现代控制论中的一种直接方法或数值方法。这一研究为模糊控制理论的理解和应用提供了更深层次的数学基础。
1.5 模糊-神经网络控制研究与应用述评----------------------------------------------------------------------------------------9
????????目前,自适应模糊控制的发展主要分为以下几种类型,这些总结主要基于Chou和Lu(1994)、金晓明、荣冈、王骥程(1996)、张恩勤、施颂椒、高卫华等(2001)的研究:
????????1. 基于模糊控制规则调整的自适应模糊控制器: 通过调整模糊控制规则中的参数来适应系统的变化,使模糊控制器更灵活地应对不同工作条件。
????????2. 基于比例因子调整的自适应模糊控制器: 通过自适应地调整模糊控制中的比例因子,实现对系统变化的适应性,以提高性能。
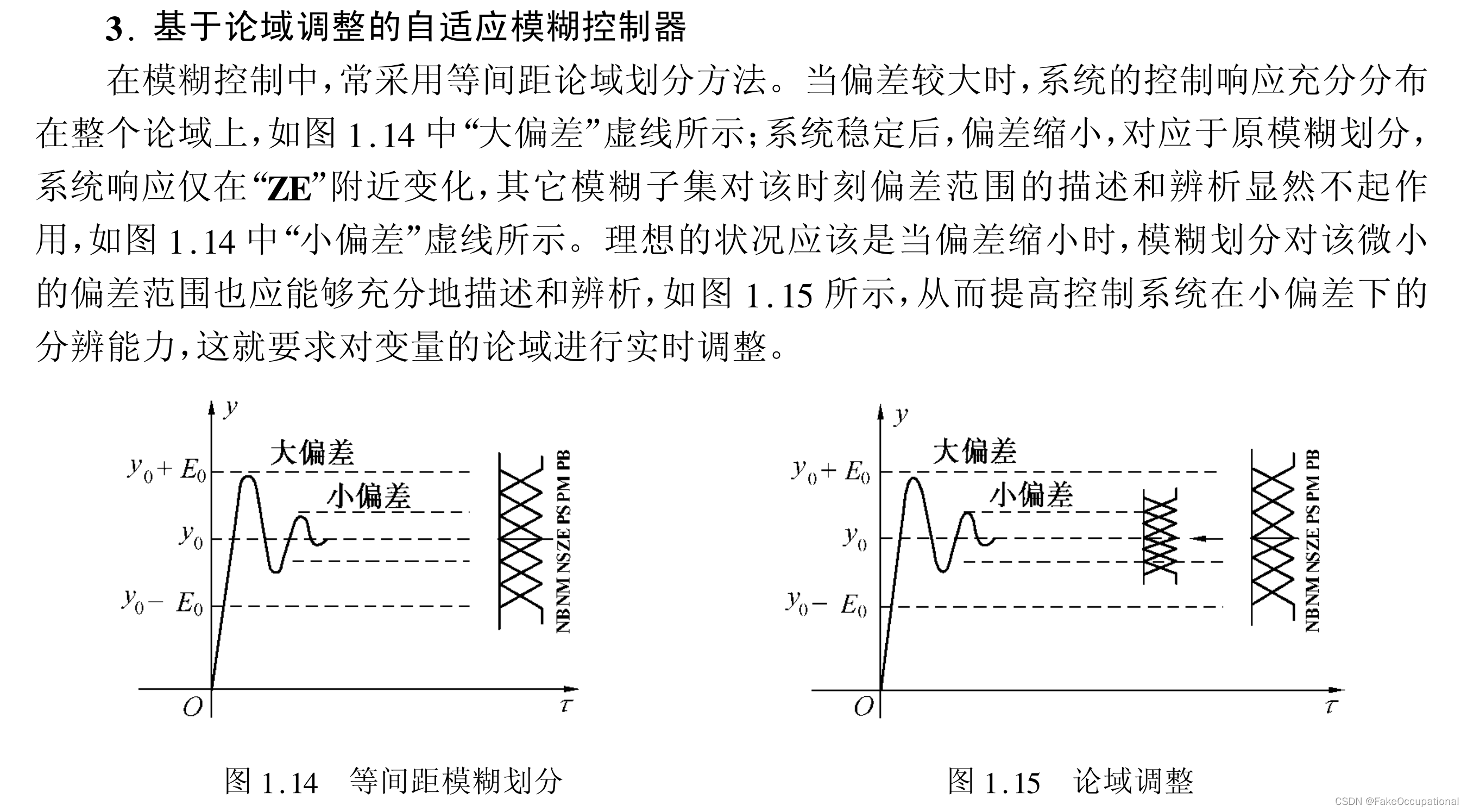
????????3. 基于论域调整的自适应模糊控制器: 通过调整模糊控制系统的输入和输出论域,使其能够适应不同的操作环境,提高鲁棒性。
????????4. 基于隶属函数调整的自适应模糊控制器: 通过调整隶属函数的形状和参数,实现对模糊集合的适应性调整,以更好地适应系统的非线性特性。
????????5. 基于模糊模型的自适应模糊控制器: 利用模糊模型对系统进行建模,并通过自适应方法调整模型参数,以适应系统的变化。
????????6. 基于PID模型的自适应模糊控制器: 结合经典的PID(比例-积分-微分)控制模型,通过自适应方法调整PID参数,以提高控制性能。
????????7. 基于神经网络的自适应模糊控制器: 利用神经网络对系统进行建模,并通过自适应方法调整神经网络的权重和结构,以适应系统的复杂性和非线性。
????????8. 基于遗传算法的自适应模糊控制器: 利用遗传算法进行参数优化,通过进化算法来自适应地调整模糊控制器的参数,以提高性能。
????????9. 基于小波变换的自适应模糊控制器: 利用小波变换对系统进行分析,并通过自适应方法调整小波变换参数,以适应系统的时变性和频域特性。
????????10. 大滞后过程自适应模糊控制器: 面向具有大滞后特性的系统,通过自适应方法设计模糊控制器,以更有效地应对滞后效应。
????????这些类型可以根据其调整策略和应用领域进行分类。前四种属于基于基本参数调整的自适应模糊控制器,第五和第六种为基于模型的自适应模糊控制器,而第七到第九种为基于智能算法的自适应模糊控制器。接下来,将从四个方面系统地介绍自适应模糊控制的研究与应用进展。
1.5.3 基于智能算法的自适应模糊控制器-----------------------------------------------------------------------------------16
神经网络与模糊控制的结合主要有3种方式:
????????1?? 在神经网络结构中引入模糊逻辑,使之具有直接处理模糊信息的能力,即模糊神经网络。
????????2?? 直接利用神经网络的学习和映射能力,实现模糊控制中的模糊化、模糊推理和反模糊化过程,即利用神经网络实现模糊控制。
????????3?? 神经网络和模糊控制各自独立,发挥各自特长,实现不同的功能,即模糊-神经网络控制。
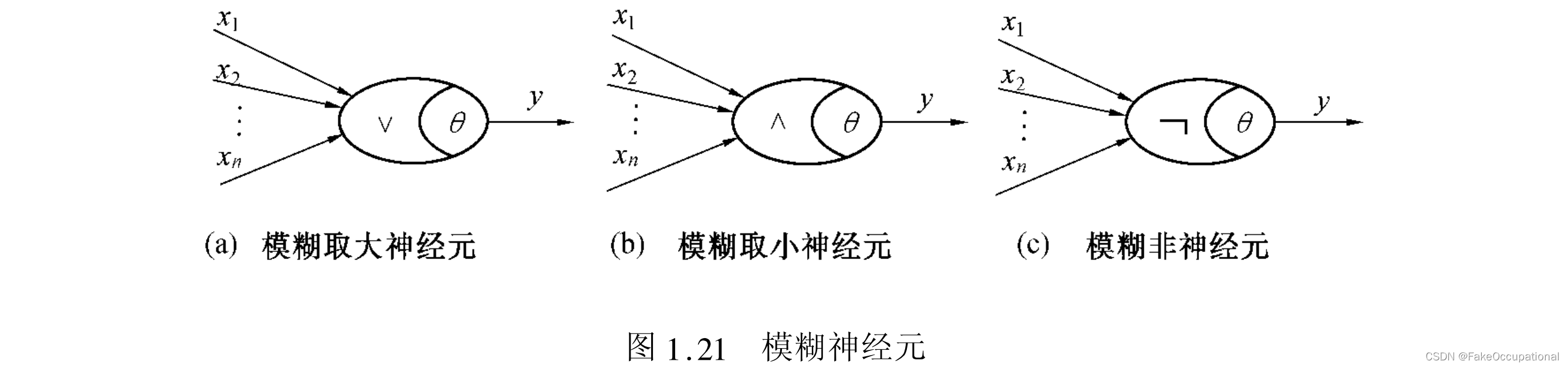
????????图 1.21 展示了模糊神经元,模糊神经网络的神经元就是模糊神经元。邹开其和李正吾提出了三种模糊神经元,如图 1.21 所示。其中 xi (i = 1, 2, …, n) 为输入,θ为阈值。
????????王振峰等人提出了基于模糊神经元的单体模糊神经网络结构,实现了单体模糊神经网络的智能控制。此外,吴孟达和杨群生等人分别对“max-min”神经网络和“最大-乘积”模糊联想记忆网络的学习算法进行了研究,为它们在模糊控制中的应用奠定了基础。
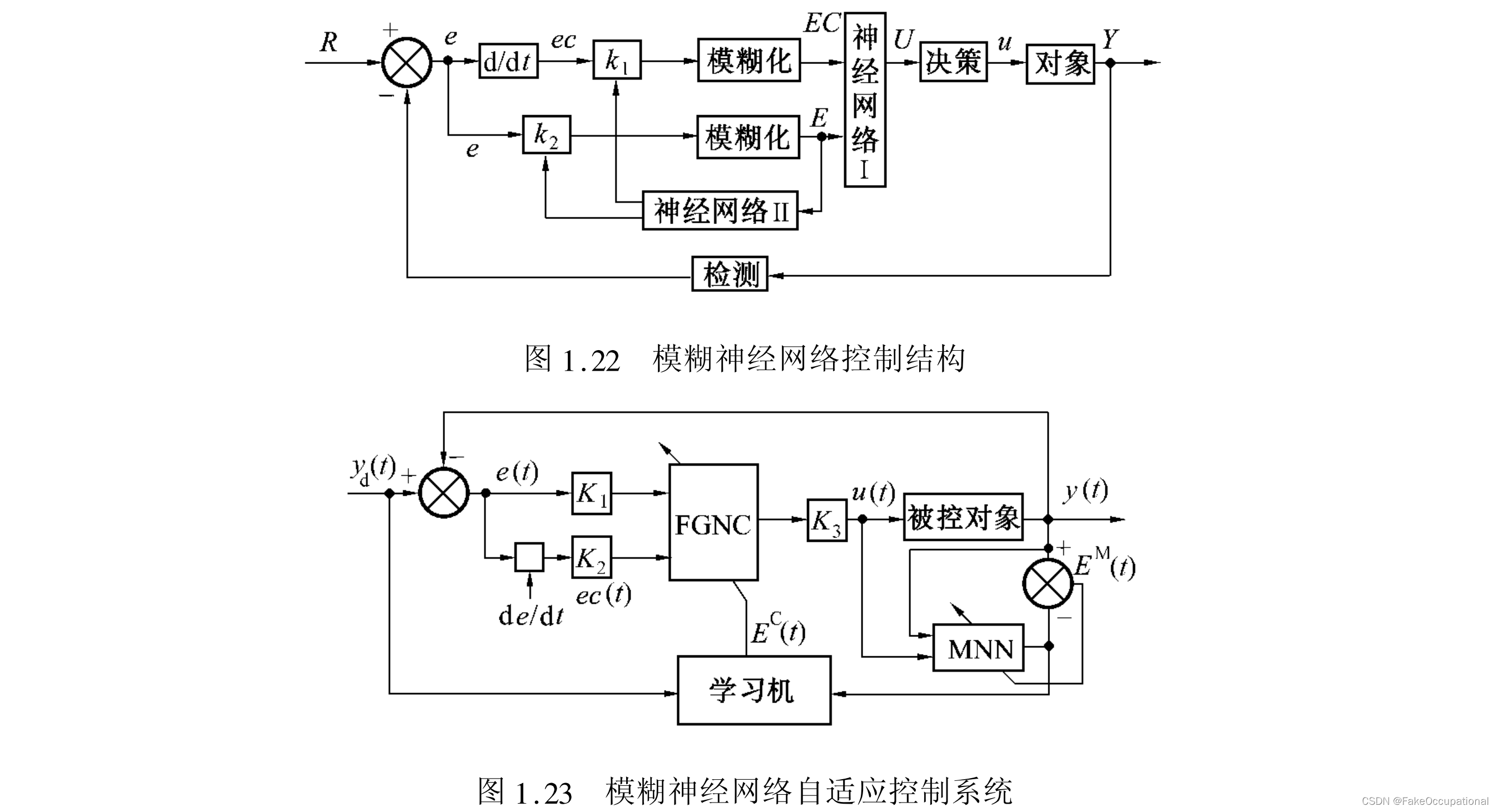
????????图1.2.3中FGNC为神经网络模糊控制器,实现模糊化、模糊推理和反模糊化过程,完成对被控对象的控制,MNN为神经网络辨识器;
第 2 章 动态系统数学模型
第 3 章 模糊控制的数学基础
????????第3章主要介绍了模糊控制的数学基础,包括模糊集合与隶属函数、模糊关系与模糊矩阵、以及模糊逻辑与模糊推理。这些内容对于理解和学习模糊控制非常重要。即使读者没有学过模糊数学,通过本章的学习,也能够顺利地掌握模糊控制的相关内容。
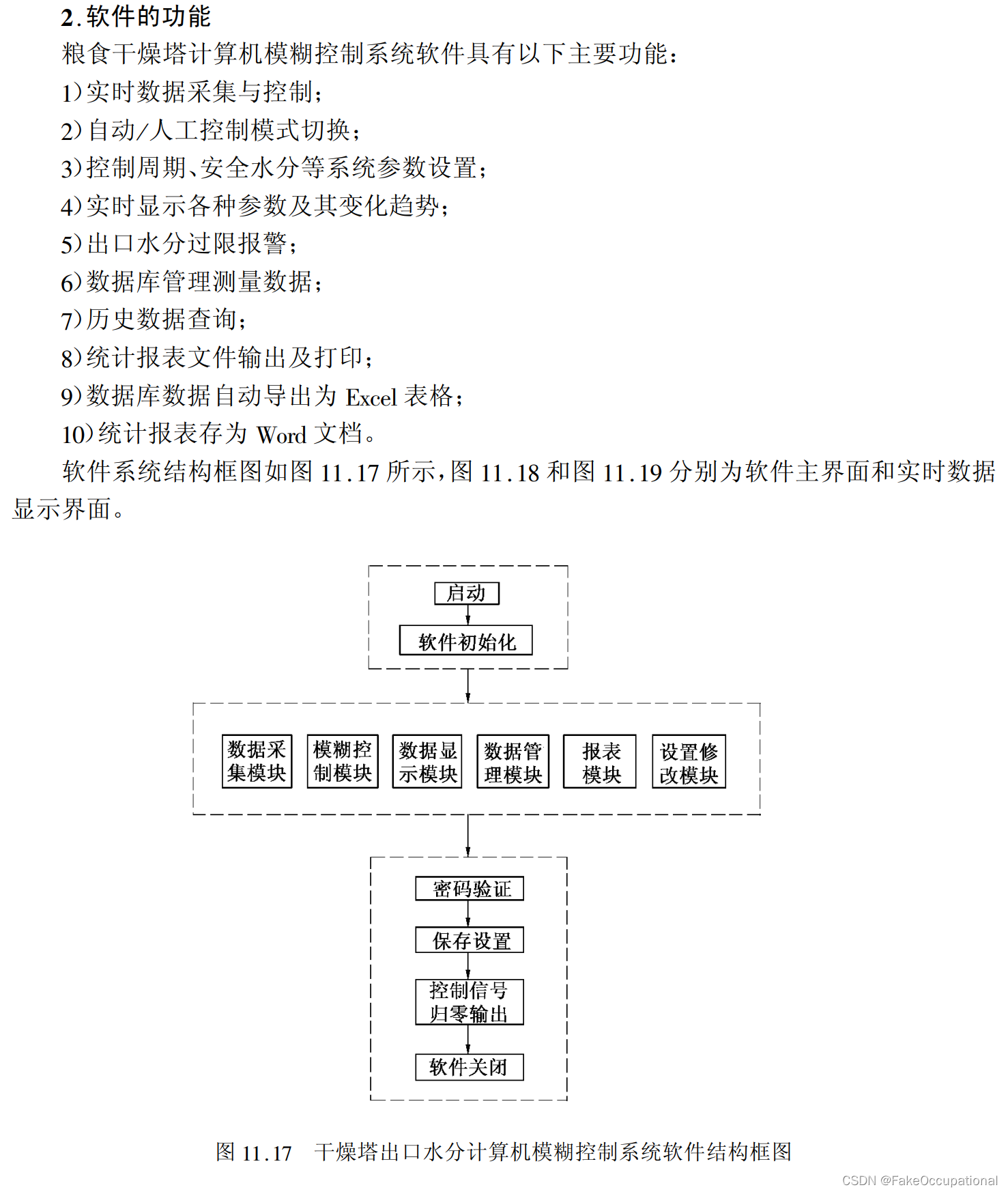
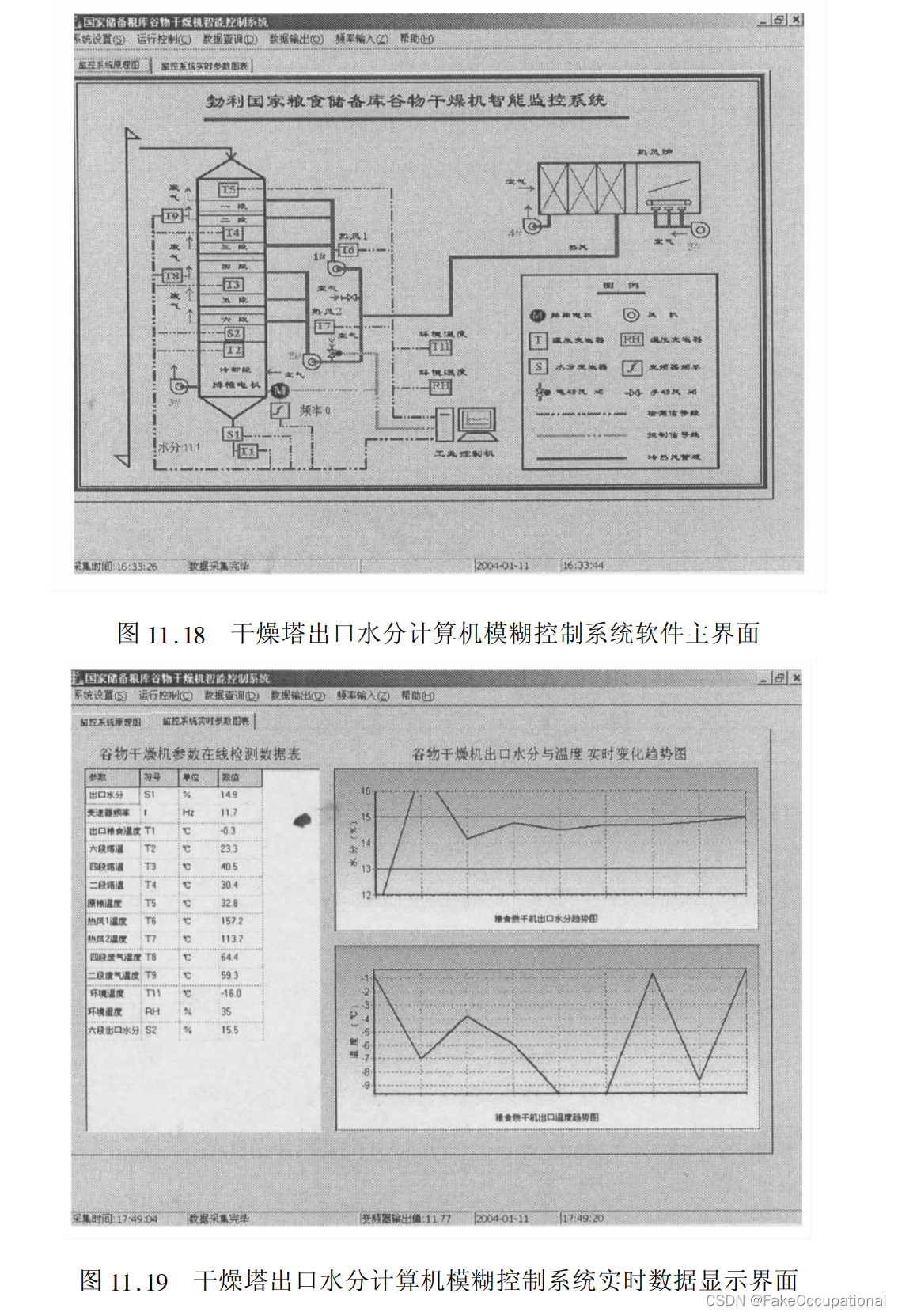
第 11 章粮食干燥过程模糊 - 神经网络控制仿真与工程应用
CG
相关截图

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!