快速碰撞刚性环境的机器人低阻抗控制(阻尼影响分析)
2023-12-14 18:53:34
问题描述
在快速碰撞刚性环境的机器人低阻抗控制中,需要通过精确的碰撞检测和处理,以及低阻抗控制策略的优化,来减少碰撞对机器人和环境的影响。同时,我们还需要适应刚性环境,提高机器人的稳定性和鲁棒性,以满足实时性的要求。
阻尼系数是影响接触力的关键参数之一。阻尼系数决定了机器人与环境之间的阻尼力的大小。较小的阻尼系数意味着机器人与环境之间的阻尼力较小,而较大的阻尼系数则会导致更大的阻尼力。阻尼力的大小直接影响到机器人与环境之间的相互作用,从而影响接触力的控制。
刚度系数也是影响接触力的重要参数之一。刚度系数描述了机器人与环境之间的刚度,即机器人对外部力的响应程度。较小的刚度系数意味着机器人对外部力的响应较小,而较大的刚度系数则会导致更大的响应。刚度系数的大小决定了机器人与环境之间的相互作用方式,从而影响接触力的控制。
1e4/(0.1*s^2+1*s+1)
Kd = 10; Bd = 10
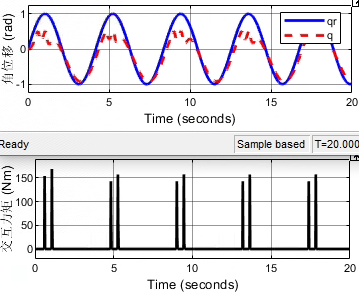
![]()
刚度小的时候就像是很软的弹簧,但接触到很刚的环境时却容易引发不稳定!!!
Kd = 10; Bd = 100
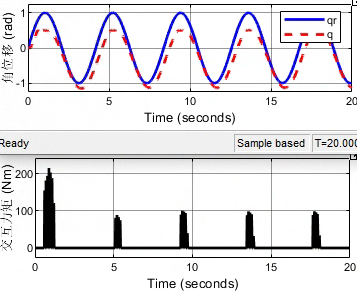
![]()

文章来源:https://blog.csdn.net/weixin_51367832/article/details/134983509
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!