HPM6750开发笔记《DMA接收和发送数据UART例程深度解析》
目录
概述:
DMA(Direct Memory Access)是一种计算机系统中的数据传输技术,它允许数据在不经过中央处理器(CPU)的直接控制下在内存和外设之间传输。UART(Universal Asynchronous Receiver/Transmitter)是一种串行通信协议,用于在设备之间传输数据。
在DMA接收和发送数据的情况下,DMA可以用于管理UART通信中的数据传输。具体来说:
-
DMA接收数据:
- 当UART接收到数据时,通常会触发中断来通知CPU。
- 使用DMA时,DMA控制器可以直接从UART接收缓冲区中读取数据,并将其存储到内存中,而无需CPU的干预。
- 这允许在数据到达时实现高效的数据传输,减轻了CPU的负担。
-
DMA发送数据:
- 当需要通过UART发送数据时,通常需要将数据写入UART的发送缓冲区,并等待发送完成。
- 使用DMA时,DMA控制器可以直接从内存中获取要发送的数据,并将其传输到UART发送缓冲区,而无需CPU的干预。
- 这提高了数据传输的效率,因为CPU可以继续执行其他任务而无需等待数据发送完成。
总的来说,DMA在UART通信中的应用可以提高数据传输的效率,减少对CPU的依赖,使系统能够更有效地处理数据。
端口设置:
波特率115200? ? ? ? 1位停止位? ? ? ? 无奇偶校验
代码分析:
包含了一些头文件,包含了与底层硬件和外设驱动相关的定义和函数声明
义了一些与UART相关的宏,如UART的基地址、时钟名、DMA请求等
声明了两个全局变量 uart_tx_dma_done 和 uart_rx_dma_done,用于表示UART的发送和接收DMA是否完成
#include "board.h"
#include "hpm_clock_drv.h"
#include "hpm_uart_drv.h"
#ifdef CONFIG_HAS_HPMSDK_DMAV2
#include "hpm_dmav2_drv.h"
#else
#include "hpm_dma_drv.h"
#endif
#include "hpm_dmamux_drv.h"
#include "hpm_l1c_drv.h"
#include "hpm_common.h"
#define TEST_UART BOARD_APP_UART_BASE
#define TEST_UART_CLK_NAME BOARD_APP_UART_CLK_NAME
#define TEST_UART_TX_DMA_REQ BOARD_APP_UART_TX_DMA_REQ
#define TEST_UART_RX_DMA_REQ BOARD_APP_UART_RX_DMA_REQ
#define TEST_UART_DMA_CONTROLLER BOARD_APP_HDMA
#define TEST_UART_DMAMUX_CONTROLLER BOARD_APP_DMAMUX
#define TEST_UART_TX_DMA_CHN (0U)
#define TEST_UART_RX_DMA_CHN (1U)
#define TEST_UART_TX_DMAMUX_CHN DMA_SOC_CHN_TO_DMAMUX_CHN(TEST_UART_DMA_CONTROLLER, TEST_UART_TX_DMA_CHN)
#define TEST_UART_RX_DMAMUX_CHN DMA_SOC_CHN_TO_DMAMUX_CHN(TEST_UART_DMA_CONTROLLER, TEST_UART_RX_DMA_CHN)
#define TEST_UART_DMA_IRQ BOARD_APP_HDMA_IRQ
#define TEST_BUFFER_SIZE (16U)
ATTR_PLACE_AT_NONCACHEABLE uint8_t uart_buff[TEST_BUFFER_SIZE];
volatile bool uart_tx_dma_done;
volatile bool uart_rx_dma_done;hpm_stat_t uart_tx_trigger_dma(DMA_Type *dma_ptr,
uint8_t ch_num,
UART_Type *uart_ptr,
uint32_t src,
uint32_t size)
{
dma_handshake_config_t config;
dma_default_handshake_config(dma_ptr, &config);
config.ch_index = ch_num;
config.dst = (uint32_t)&uart_ptr->THR;
config.dst_fixed = true;
config.src = src;
config.src_fixed = false;
config.data_width = DMA_TRANSFER_WIDTH_BYTE;
config.size_in_byte = size;
return dma_setup_handshake(dma_ptr, &config, true);
}-
参数说明:
dma_ptr: DMA控制器的指针,指向用于配置和控制DMA的硬件寄存器。ch_num: DMA通道号,表示要配置的DMA通道。uart_ptr: UART控制器的指针,指向用于配置和控制UART的硬件寄存器。src: 数据源的地址,这是UART发送数据的来源。size: 要传输的数据大小,以字节为单位。
-
函数逻辑:
- 创建一个
dma_handshake_config_t类型的结构体变量config,用于配置DMA的握手参数。 - 调用
dma_default_handshake_config函数初始化config结构体,设置了一些默认的DMA握手参数。 - 设置
config结构体的各个成员:ch_index: DMA通道号。dst: 目的地地址,这里是UART的传输保持寄存器(THR - Transmitter Holding Register)的地址。dst_fixed: 目的地地址是否固定,这里设置为true,表示目的地地址不变。src: 数据源地址,即要发送的数据的地址。src_fixed: 数据源地址是否固定,这里设置为false,表示数据源地址可能变化。data_width: 数据传输宽度,这里设置为字节宽度。size_in_byte: 要传输的数据大小。
- 创建一个
-
返回值:
- 调用
dma_setup_handshake函数,根据配置好的参数设置DMA握手,并返回相应的状态。
- 调用
-
注意事项:
- 该函数通过设置DMA的握手参数,将UART的发送数据配置到DMA通道中,并返回相应的状态,用于后续判断是否配置成功。
这个函数的作用是通过DMA实现UART的发送数据,配置了DMA握手参数,确保数据正确地传输到UART传输保持寄存器中。
hpm_stat_t uart_rx_trigger_dma(DMA_Type *dma_ptr,
uint8_t ch_num,
UART_Type *uart_ptr,
uint32_t dst,
uint32_t size)
{
dma_handshake_config_t config;
dma_default_handshake_config(dma_ptr, &config);
config.ch_index = ch_num;
config.dst = dst;
config.dst_fixed = false;
config.src = (uint32_t)&uart_ptr->RBR;
config.src_fixed = true;
config.data_width = DMA_TRANSFER_WIDTH_BYTE;
config.size_in_byte = size;
return dma_setup_handshake(dma_ptr, &config, true);
}-
参数说明:
dma_ptr: DMA控制器的指针,指向用于配置和控制DMA的硬件寄存器。ch_num: DMA通道号,表示要配置的DMA通道。uart_ptr: UART控制器的指针,指向用于配置和控制UART的硬件寄存器。dst: 数据目的地的地址,这是用于存储UART接收数据的缓冲区的地址。size: 要传输的数据大小,以字节为单位。
-
函数逻辑:
- 创建一个
dma_handshake_config_t类型的结构体变量config,用于配置DMA的握手参数。 - 调用
dma_default_handshake_config函数初始化config结构体,设置了一些默认的DMA握手参数。 - 设置
config结构体的各个成员:ch_index: DMA通道号。dst: 目的地地址,即UART接收数据的缓冲区地址。dst_fixed: 目的地地址是否固定,这里设置为false,表示目的地地址可能变化。src: 数据源地址,这里是UART的接收保持寄存器(RBR - Receiver Buffer Register)的地址。src_fixed: 数据源地址是否固定,这里设置为true,表示数据源地址不变。data_width: 数据传输宽度,这里设置为字节宽度。size_in_byte: 要传输的数据大小。
- 创建一个
-
返回值:
- 调用
dma_setup_handshake函数,根据配置好的参数设置DMA握手,并返回相应的状态。
- 调用
-
注意事项:
- 该函数通过设置DMA的握手参数,将UART的接收数据配置到DMA通道中,并返回相应的状态,用于后续判断是否配置成功。
这个函数的作用是通过DMA实现UART的接收数据,配置了DMA握手参数,确保UART接收到的数据传输到指定的缓冲区中。
void dma_isr(void)
{
volatile hpm_stat_t stat_rx_chn, stat_tx_chn;
stat_rx_chn = dma_check_transfer_status(TEST_UART_DMA_CONTROLLER, TEST_UART_RX_DMA_CHN);
if (stat_rx_chn & DMA_CHANNEL_STATUS_TC) {
uart_rx_dma_done = true;
}
stat_tx_chn = dma_check_transfer_status(TEST_UART_DMA_CONTROLLER, TEST_UART_TX_DMA_CHN);
if (stat_tx_chn & DMA_CHANNEL_STATUS_TC) {
uart_tx_dma_done = true;
}
}
SDK_DECLARE_EXT_ISR_M(TEST_UART_DMA_IRQ, dma_isr)-
函数逻辑:
- 定义两个局部变量
stat_rx_chn和stat_tx_chn,用于保存DMA通道的传输状态。 - 调用
dma_check_transfer_status函数检查UART接收和发送的DMA通道的传输状态。 - 如果接收通道的传输状态中包含
DMA_CHANNEL_STATUS_TC(传输完成),则将uart_rx_dma_done置为true,表示UART接收DMA完成。 - 如果发送通道的传输状态中包含
DMA_CHANNEL_STATUS_TC,则将uart_tx_dma_done置为true,表示UART发送DMA完成。
- 定义两个局部变量
-
注意事项:
volatile修饰stat_rx_chn和stat_tx_chn,表示这两个变量可能在中断服务例程之外被修改,确保编译器不会对它们进行优化。- 中断处理函数通过检查DMA通道的传输状态来确定DMA是否完成,从而设置相应的标志位。
-
宏
SDK_DECLARE_EXT_ISR_M:- 该宏用于声明外部中断服务例程。在这里,使用该宏声明了中断服务例程
dma_isr并关联到TEST_UART_DMA_IRQ所指定的中断。
- 该宏用于声明外部中断服务例程。在这里,使用该宏声明了中断服务例程
这个中断服务例程的作用是在DMA传输完成时被调用,检查相应的DMA通道状态,并设置标志位以通知主程序相应的DMA传输已完成。
int main(void)
{
hpm_stat_t stat;
uart_config_t config = {0};
board_init();
printf("UART DMA \n");
printf("UART will send back received characters, echo every %d bytes\n", TEST_BUFFER_SIZE);
/* if TEST_UART is same as BOARD_CONSOLE_BASE, it has been initialized in board_init(); */
board_init_uart(TEST_UART);
uart_default_config(TEST_UART, &config);
config.fifo_enable = true;
config.dma_enable = true;
config.src_freq_in_hz = clock_get_frequency(TEST_UART_CLK_NAME);
config.tx_fifo_level = uart_tx_fifo_trg_not_full;
config.rx_fifo_level = uart_rx_fifo_trg_not_empty;
stat = uart_init(TEST_UART, &config);
if (stat != status_success) {
printf("failed to initialize uart\n");
while (1) {
}
}
intc_m_enable_irq_with_priority(TEST_UART_DMA_IRQ, 1);
dmamux_config(TEST_UART_DMAMUX_CONTROLLER, TEST_UART_RX_DMAMUX_CHN, TEST_UART_RX_DMA_REQ, true);
dmamux_config(TEST_UART_DMAMUX_CONTROLLER, TEST_UART_TX_DMAMUX_CHN, TEST_UART_TX_DMA_REQ, true);
while (1) {
/* config rx dma transfer */
stat = uart_rx_trigger_dma(TEST_UART_DMA_CONTROLLER,
TEST_UART_RX_DMA_CHN,
TEST_UART,
core_local_mem_to_sys_address(BOARD_RUNNING_CORE, (uint32_t)uart_buff),
TEST_BUFFER_SIZE);
if (stat != status_success) {
printf("uart rx trigger dma failed\n");
break;
}
while (!uart_rx_dma_done) {
__asm("nop");
}
uart_rx_dma_done = false;
/* config tx dma transfer */
stat = uart_tx_trigger_dma(TEST_UART_DMA_CONTROLLER,
TEST_UART_TX_DMA_CHN,
TEST_UART,
core_local_mem_to_sys_address(BOARD_RUNNING_CORE, (uint32_t)uart_buff),
TEST_BUFFER_SIZE);
if (stat != status_success) {
printf("uart tx trigger dma failed\n");
break;
}
while (!uart_tx_dma_done) {
__asm("nop");
}
uart_tx_dma_done = false;
}
while (1) {
__asm("nop");
}
return 0;
}
- 代码逻辑:
- 调用
board_init初始化板子。 - 输出一些提示信息,包括 "UART DMA" 和 UART 将返回接收到的字符,每次回显的字节数。
- 如果
TEST_UART与BOARD_CONSOLE_BASE相同,说明UART已在board_init中初始化。 - 调用
board_init_uart初始化UART。 - 初始化UART配置,包括使能FIFO、DMA,设置传输频率等。
- 调用
uart_init初始化UART,检查初始化是否成功。 - 启用DMA中断,并配置UART的DMA传输请求。
- 进入主循环,循环中:
- 配置UART接收的DMA传输。
- 等待UART接收DMA完成。
- 配置UART发送的DMA传输。
- 等待UART发送DMA完成。
- 如果在DMA配置过程中发生错误,输出相应的错误信息,并跳出主循环。
- 主循环最后有一个空操作,用于保持程序运行。
- 调用
该主函数的主要任务是配置并执行UART的DMA传输,实现了UART接收到的数据的回显。
以下是上述代码的主要运行流程:
-
初始化:
- 初始化嵌入式系统板。
- 打印一些信息,包括 "UART DMA" 和一条关于将接收到的字符发送回去的消息。
- 初始化 UART 模块,包括配置 UART 的基本参数和启用 DMA。
-
设置中断和DMA多路复用:
- 启用 UART DMA 中断并设置中断优先级。
- 配置 DMA 多路复用,将 RX 和 TX DMA 通道与 UART 的相应请求关联。
-
主循环:
- 进入一个无限循环,该循环执行以下操作:
- 配置 RX DMA 传输:设置 UART 接收的 DMA 传输,将接收到的数据存储在
uart_buff缓冲区中。 - 等待 RX DMA 传输完成:通过轮询等待
uart_rx_dma_done标志。 - 在数据前添加 "send" 前缀:将 "send" 字符串复制到
uart_buff的开头。 - 配置 TX DMA 传输:设置 UART 发送的 DMA 传输,发送整个
uart_buff缓冲区的数据。 - 等待 TX DMA 传输完成:通过轮询等待
uart_tx_dma_done标志。
- 配置 RX DMA 传输:设置 UART 接收的 DMA 传输,将接收到的数据存储在
- 进入一个无限循环,该循环执行以下操作:
-
结束:
- 由于主循环是一个无限循环,因此在实际应用中可能需要添加适当的终止条件。
- 在实际应用中,可能还需要在主循环中添加对接收到的数据的处理逻辑。
总体而言,该代码通过 DMA 实现了 UART 数据的异步传输。接收到的数据被存储在 uart_buff 缓冲区中,并在发送之前添加了 "send" 前缀。此过程一直在一个无限循环中进行,确保持续接收和发送数据。
运行现象:
当工程正确运行后,通过串口手动输入字符串,如 ‘1234567887654321’,则串口终端会收到如下信息:
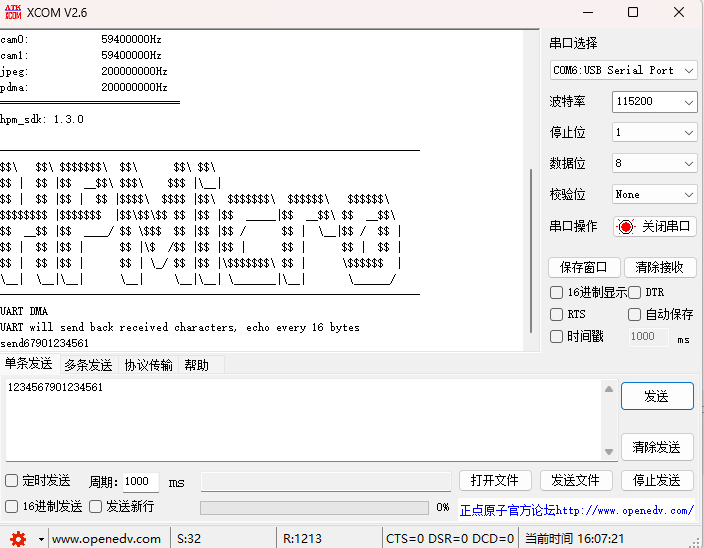
UART DMA example UART will send back received characters, echo every 16 bytes 1234567887654321
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!