Yolov4重大的更新,结构组件
YOLO之父在2020年初宣布退出CV界,YOLOv4 的作者并不是YOLO系列 的原作者。YOLO V4是YOLO系列一个重大的更新,其在COCO数据集上的平均精度(AP)和帧率精度(FPS)分别提高了10% 和12%,并得到了Joseph Redmon的官方认可,被认为是当前最强的实时对象检测模型之一。
yoloV4总结了大部分检测技巧,然后经过筛选,排列组合,挨个实验(ablation study)哪些方法有效,总体来说,Yolov4并没有创造新的改进,而是使用了大量的目标检测的技巧。在这里我们主要给大家看下它的网络架构:
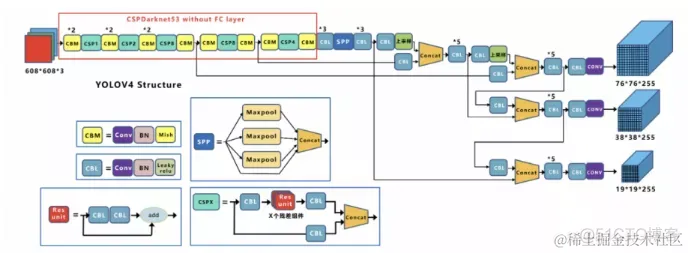
Yolov4的结构图和Yolov3是相似的,不过使用各种新的算法思想对各个子结构都进行了改进。 先整理下Yolov4的结构组件
基本组件:
CBM:Yolov4网络结构中的最小组件,由Conv+Bn+Mish激活函数三者组成。
CBL:由Conv+Bn+Leaky_relu激活函数三者组成。
Res unit:借鉴Resnet网络中的残差结构,让网络可以构建的更深。
CSPX:由三个卷积层和X个Res unint模块Concate组成。
SPP:采用1×1,5×5,9×9,13×13的最大池化的方式,进行多尺度融合。
其他基础操作:
Concat:张量拼接,维度会扩充,和Yolov3中的解释一样,对应于cfg文件中的route操作。
Add:张量相加,不会扩充维度,对应于cfg文件中的shortcut操作。
Backbone中卷积层的数量: 每个CSPX中包含3+2×X个卷积层,因此整个主干网络Backbone中一共包含2+(3+2×1)+2+(3+2×2)+2+(3+2×8)+2+(3+2×8)+2+(3+2×4)+1=72。
注意:
网络的输入大小不是固定的,在yoloV3中输入默认是416×416,在yoloV4中默认是608×608,在实际项目中也可以根据需要修改,比如320×320,一般是32的倍数。
输入图像的大小和最后的三个特征图的大小也是对应的,比如416×416的输入,最后的三个特征图大小是13×13,26×26,52×52, 如果是608×608,最后的三个特征图大小则是19×19,38×38,76×76。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!