CT成像技术—20231210
本文要说的是扇束重排,对于扇束及锥束直接重建公式,可以看我做的PDF
https://github.com/leslielee619/CTRec/blob/main/重建公式.pdf
在说重排之前,我还想对那个文件内容补充两点:
1、FDK算法或Feldkamp算法,出自Feldkamp,Davis,Kress三人于1984年发表论文
Feldkamp, L. A ,Davis,et al.Practical cone-beam algorithm[J].Journal of the Optical Society of America A, 1984.DOI:10.1364/JOSAA.1.000612.
2、想象一个射线系统,没有检测物体。射线束从射线源发出,由探测器接收。假定与射线垂直的平面(射线束横截面)上的光子总数不变。沿着射线方向,扇束横截面越来越大,因此每条射线上的光子数越来越少。因此导致了扇束重建公式与平行束重建公式的不同,前者在滤波与反投影之前都要进行加权,而后者则不需要加权。
对于算法的具体实现,重建公式背后含义我之后会继续去理解。
扇束重排rebinning
将扇形束投影数据重排为平行束,便可直接应用平行束滤波反投影算法。
投影数据可用正弦图描述,横轴为 t t t,纵轴为 θ \theta θ。 t t t为射线至旋转中心的距离, θ \theta θ为射线与 x x x轴的夹角。
对于平行投影,单次投影数据对应正弦图的一行。这一组数据
θ
\theta
θ固定,
t
t
t变化。
对于(等角或等间距)扇束投影,单次投影数据对应正弦图的一个斜行(近似为一个斜行)。这一组数据
θ
\theta
θ变化,
t
t
t变化。
同平行束一样,扇形束中的每条射线也是直线,因此可将其与平行束建立联系。
方法1(等距或等角):按照坐标
(
t
,
θ
)
(t,\theta)
(t,θ),将每个扇形束投影放至正弦图中。再通过插值,求出对应的平行束正弦图,便可进行滤波反投影算法。即将一个平行四边形网格重新插值为矩形网格。
注:平行束的正弦图离散表示就是一个矩形网格,我们就是要求这每个网格点。网格点可通过由其周围的扇形束数据插值得到。
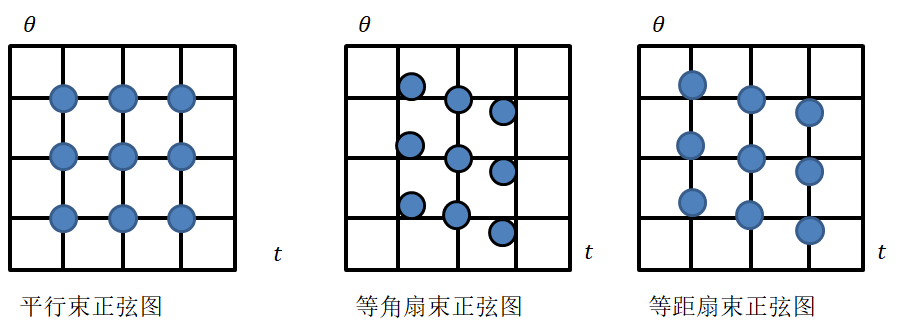
上面这个图是我自己画的,可以很形象的说明如何重排。
方法2(等角):step1、先沿横轴插值,将投影重排为等距扇束;step2、沿纵轴插值,将等距扇束重排为平行束。
方法3(等角):step1、先沿纵轴插值,将投影重排为非等间距的平行束;step2、沿横轴插值,将非等间距平行束重排为(等间距)平行束。
对于等距扇束重排,可采样方法2的step2。
方1为二维插值,方2方3为一维插值。
术语:
iso-center旋转中心
iso-ray过旋转中心的射线,简称中心射线
iso-channel:指iso-ray与一维探测器的交点,简称中心通道。但该探测器通道不一定实际存在。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!