[足式机器人]Part2 Dr. CAN学习笔记-Ch01自动控制原理
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-Ch01自动控制原理
1. 开环系统与闭环系统Open/Closed Loop System
1.1 EG1: 烧水与控温水壶

1.2 EG2: 蓄水与最终水位

h
˙
=
q
i
n
A
?
g
h
A
R
\dot{h}=\frac{q_{in}}{A}-\frac{gh}{AR}
h˙=Aqin???ARgh?
设
A
=
1
A=1
A=1. 目标:
h
=
x
→
x
d
h=x\rightarrow x_d
h=x→xd? —— 保持液面高度
x
d
=
C
R
g
,
C
=
x
d
g
R
=
u
,
G
(
s
)
=
1
S
+
g
R
x_d=\frac{CR}{g},C=\frac{x_dg}{R}=u,G\left( s \right) =\frac{1}{S+\frac{g}{R}}
xd?=gCR?,C=Rxd?g?=u,G(s)=S+Rg?1?
1.3 闭环控制系统

X
=
D
G
1
+
H
D
G
V
X=\frac{DG}{1+HDG}V
X=1+HDGDG?V
2. 稳定性分析Stability
2.1 序言

2.2 稳定的分类

2.3 稳定的对象
明确分析对象

e
=
T
a
r
g
e
t
??
?
??
θ
e=Target\,\,-\,\,\theta
e=Target?θ
Does the error converge to zero or not —— error dynamics stable or not
2.4 稳定的系统
Open loop 开环

Closed loop 闭环

EG1:

EG2:

2.5 系统稳定性的讨论


2.6 补充内容——Transfer Function(传递函数) - nonzero Initial Condition(非零初始条件)

3. 燃烧卡路里-系统分析实例
3.1 数学模型


3.2 比例控制 Proprotional Control


4 终值定理和稳态误差Final Value Theorem & Steady State Error



5 比例积分控制器Proportional-Intefral Controller
消除稳态误差——设计新的控制器


6 根轨迹Root locus
6.1 根的作用
G
(
s
)
=
s
+
3
s
2
+
2
s
+
4
G\left( s \right) =\frac{s+3}{s^2+2s+4}
G(s)=s2+2s+4s+3?
Matlab可绘制 riocus(g)
掌握根的变化规律 , 设计控制器,补偿器 : Compentator Lead Lag…
根 —— 极点
- 一阶系统

- 二阶系统


- 三阶系统


6.2 手绘技巧
Matlab可以精确绘制——手绘——掌握根的变化规律——设计控制器
根轨迹的基本形式

根轨迹研究的是: 当
K
K
K从0到
+
∞
+\infty
+∞时,闭环系统根(极点)位置的变化规律
1 + K G ( s ) = 0 , G ( s ) = N ( s ) D ( s ) = ( s ? z 1 ) ( s ? z 2 ) ? ( s ? z m ) ( s ? p 1 ) ( s ? p 2 ) ? ( s ? p n ) 1+KG\left( s \right) =0,G\left( s \right) =\frac{N\left( s \right)}{D\left( s \right)}=\frac{\left( s-z_1 \right) \left( s-z_2 \right) \cdots \left( s-z_{\mathrm{m}} \right)}{\left( s-p_1 \right) \left( s-p_2 \right) \cdots \left( s-p_{\mathrm{n}} \right)} 1+KG(s)=0,G(s)=D(s)N(s)?=(s?p1?)(s?p2?)?(s?pn?)(s?z1?)(s?z2?)?(s?zm?)?
其中,
z
1
?
z
m
z_1\cdots z_{\mathrm{m}}
z1??zm? 为零点 Zeros
⊙
\odot
⊙ ,
p
1
?
p
n
p_1\cdots p_{\mathrm{n}}
p1??pn? 为极点 Poles
×
\times
×
规则1 :共有
n
n
n条根轨迹, 若
n
>
m
n>m
n>m;共有
m
m
m条根轨迹,若
m
>
n
m>n
m>n;
?
max
?
{
m
,
n
}
\Leftarrow \max \left\{ m,n \right\}
?max{m,n}
规则2 :若
m
=
n
m=n
m=n,随着
K
K
K从
0
→
∞
0\rightarrow \infty
0→∞ , 根轨迹从
G
(
s
)
G\left( s \right)
G(s)的极点向零点移动:
1
+
K
G
(
s
)
=
0
?
D
(
s
)
+
K
N
(
s
)
=
0
1+KG\left( s \right) =0\Rightarrow D\left( s \right) +KN\left( s \right) =0
1+KG(s)=0?D(s)+KN(s)=0 ,
K
→
0
K\rightarrow 0
K→0 时
D
(
s
)
=
0
D\left( s \right) =0
D(s)=0(极点);
K
→
∞
K\rightarrow \infty
K→∞ 时
N
(
s
)
=
0
N\left( s \right) =0
N(s)=0 (零点)
规则3:实轴上的根轨迹存在于从右向左第奇数个极点/零点的左边
规则4:若附属跟存在,则一定是共轭的,所以根轨迹通过实轴对称
规则5:若
n
>
m
n>m
n>m , 则有
n
?
m
n-m
n?m个极点指向无穷;若
m
>
n
m>n
m>n , 则有
m
?
n
m-n
m?n条根轨迹从无穷指向零点
规则6:根轨迹延渐近线移动,渐近线与实轴的交点
σ
=
∑
p
?
∑
z
n
?
m
\sigma =\frac{\sum{p}-\sum{z}}{n-m}
σ=n?m∑p?∑z? ,渐近线与实轴的夹角
θ
=
2
q
+
1
n
?
m
π
,
q
=
0
,
1
,
.
.
.
,
n
?
m
?
1
/
m
?
n
?
1
\theta =\frac{2q+1}{n-m}\pi ,q=0,1,...,n-m-1/m-n-1
θ=n?m2q+1?π,q=0,1,...,n?m?1/m?n?1

6.3 分离点/汇合点&根轨迹的几何性质
以 2nd-order system 为例:

Properties of Root locus

7 Lead Compensator超前补偿器(调节根轨迹)

7.1 Plot Rootlocus 绘制根轨迹
G
(
s
)
=
1
s
(
s
+
2
)
G\left( s \right) =\frac{1}{s\left( s+2 \right)}
G(s)=s(s+2)1?

7.2 System Performance 系统表现
输入Input —— δ ( t ) \delta \left( t \right) δ(t) 单位冲激
-
K
K
K 较小时,
p
1
,
p
2
p_1,p_2
p1?,p2? :
x
(
t
)
=
c
1
e
p
1
t
+
c
2
e
p
2
t
,
p
1
<
0
,
p
2
<
0
x\left( t \right) =c_1e^{p_1t}+c_2e^{p_2t},p_1<0,p_2<0
x(t)=c1?ep1?t+c2?ep2?t,p1?<0,p2?<0

-
K
K
K 较大时,根在复平面:
p
1
,
p
2
p_1,p_2
p1?,p2? :
x
(
t
)
=
c
e
?
t
sin
?
ω
n
t
x\left( t \right) =ce^{-t}\sin \omega _{\mathrm{n}}t
x(t)=ce?tsinωn?t - 无论如何改变
K
K
K值,都无法改变收敛速度
-
7.3 改善/加快收敛速度
——改变根轨迹,希望根在
?
2
+
2
3
-2+2\sqrt{3}
?2+23?
G
(
s
)
=
1
s
(
s
+
2
)
G\left( s \right) =\frac{1}{s\left( s+2 \right)}
G(s)=s(s+2)1?
在根轨迹上的点满足:
∠
K
G
(
s
)
=
?
π
\angle KG\left( s \right) =-\pi
∠KG(s)=?π (零点到根的夹角和 - 极点到根的夹角和)
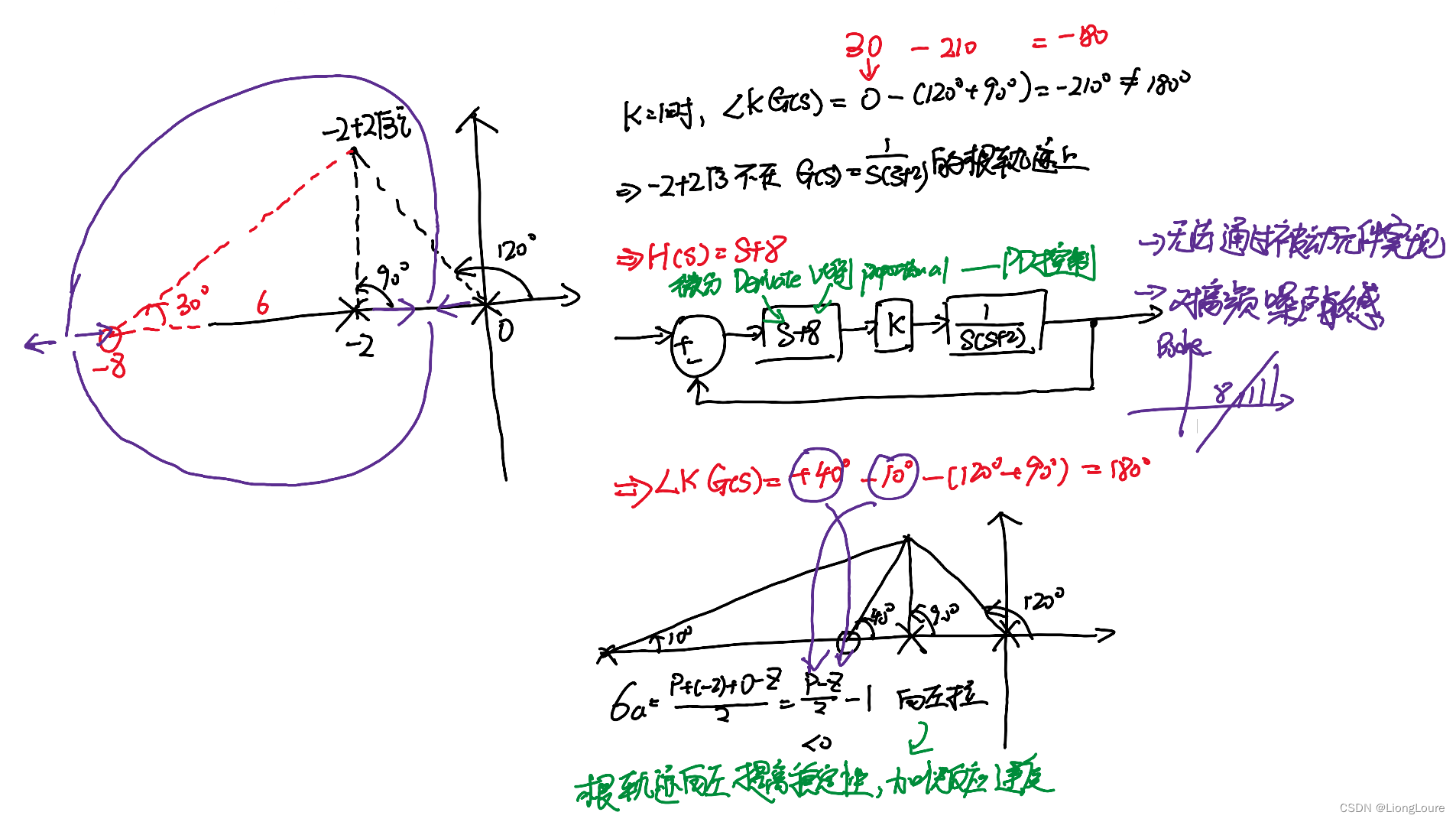
7.4 超前补偿器 Lead Comperastor
H
(
s
)
=
s
?
z
s
?
p
,
∥
z
∥
<
∥
p
∥
H\left( s \right) =\frac{s-z}{s-p},\left\| z \right\| <\left\| p \right\|
H(s)=s?ps?z?,∥z∥<∥p∥

8 Lag Compensator滞后补偿器
从稳态误差入手(steady state Error)

误差 Error :
E
(
s
)
=
R
(
s
)
?
X
(
s
)
=
R
(
s
)
?
E
(
s
)
?
K
G
(
s
)
?
E
(
s
)
(
1
+
K
G
(
s
)
)
=
R
(
s
)
?
E
(
s
)
=
1
1
+
K
G
(
s
)
R
(
s
)
=
R
(
s
)
1
1
+
K
N
(
s
)
D
(
s
)
=
1
s
1
1
+
K
N
(
s
)
D
(
s
)
E\left( s \right) =R\left( s \right) -X\left( s \right) =R\left( s \right) -E\left( s \right) \cdot KG\left( s \right) \Rightarrow E\left( s \right) \left( 1+KG\left( s \right) \right) =R\left( s \right) \Rightarrow E\left( s \right) =\frac{1}{1+KG\left( s \right)}R\left( s \right) =R\left( s \right) \frac{1}{1+K\frac{N\left( s \right)}{D\left( s \right)}}=\frac{1}{s}\frac{1}{1+K\frac{N\left( s \right)}{D\left( s \right)}}
E(s)=R(s)?X(s)=R(s)?E(s)?KG(s)?E(s)(1+KG(s))=R(s)?E(s)=1+KG(s)1?R(s)=R(s)1+KD(s)N(s)?1?=s1?1+KD(s)N(s)?1?
单位阶跃unit step :
R
(
s
)
=
1
s
R\left( s \right) =\frac{1}{s}
R(s)=s1?
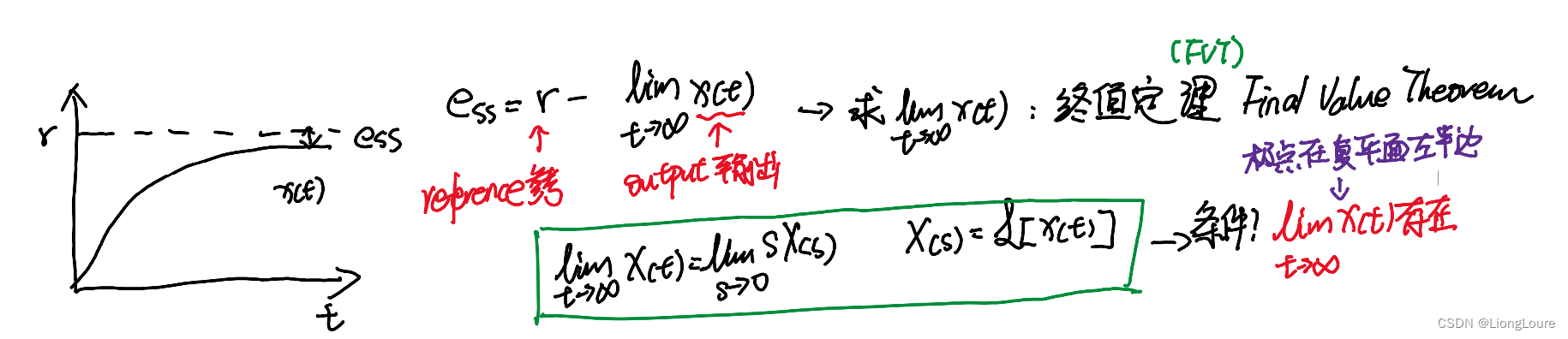
稳态误差Steady State Error——FVT终值定理
e
s
s
=
lim
?
t
→
∞
e
(
t
)
=
lim
?
s
→
o
s
E
(
s
)
=
lim
?
s
→
o
s
?
1
s
1
1
+
K
N
(
s
)
D
(
s
)
=
1
1
+
K
N
(
0
)
D
(
0
)
=
D
(
0
)
D
(
0
)
+
K
N
(
0
)
ess=\underset{t\rightarrow \infty}{\lim}e\left( t \right) =\underset{s\rightarrow o}{\lim}sE\left( s \right) =\underset{s\rightarrow o}{\lim}s\cdot \frac{1}{s}\frac{1}{1+K\frac{N\left( s \right)}{D\left( s \right)}}=\frac{1}{1+K\frac{N\left( 0 \right)}{D\left( 0 \right)}}=\frac{D\left( 0 \right)}{D\left( 0 \right) +KN\left( 0 \right)}
ess=t→∞lim?e(t)=s→olim?sE(s)=s→olim?s?s1?1+KD(s)N(s)?1?=1+KD(0)N(0)?1?=D(0)+KN(0)D(0)?


9 PID控制器
P —— Proportional
I —— Integral
D —— Derivative
- 当前误差/过去误差/误差的变化趋势

- K p ? e K_{\mathrm{p}}\cdot e Kp??e:比例增益——当前误差
- K I ? ∫ e d t K_{\mathrm{I}}\cdot \int{e}dt KI??∫edt:积分增益——过去误差-积累
-
K
D
?
d
e
d
t
K_{\mathrm{D}}\cdot \frac{\mathrm{d}e}{\mathrm{d}t}
KD??dtde? :微分增益——变化趋势 (对噪音敏感)
L [ u ] = L [ K P ? e + K I ? ∫ e d t + K D ? d e d t ] ? U ( s ) = ( K P + K I 1 s + K D s ) ? E ( s ) \mathcal{L} \left[ u \right] =\mathcal{L} \left[ K_{\mathrm{P}}\cdot e+K_{\mathrm{I}}\cdot \int{e}\mathrm{d}t+K_{\mathrm{D}}\cdot \frac{\mathrm{d}e}{\mathrm{d}t} \right] \Rightarrow U\left( s \right) =\left( K_{\mathrm{P}}+K_{\mathrm{I}}\frac{1}{s}+K_{\mathrm{D}}s \right) \cdot E\left( s \right) L[u]=L[KP??e+KI??∫edt+KD??dtde?]?U(s)=(KP?+KI?s1?+KD?s)?E(s)
PID
PD控制:提高稳定性,改善瞬态
PI控制:改善稳态误差
10 奈奎斯特稳定性判据-Nyquist Stability Criterion


Cauchy’s Argument Priciple 柯西幅角原理

结论: s s s平面内顺时针画一条闭合曲线 A A A, B B B曲线是 A A A通过 F ( s ) F(s) F(s)后在 F ( s ) F(s) F(s)平面上的映射, A A A曲线每包含一个 F ( s ) F(s) F(s)的零点(极点), B B B曲线就绕 ( 0 , 0 ) (0,0) (0,0)点顺时针(逆时针)一圈

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!