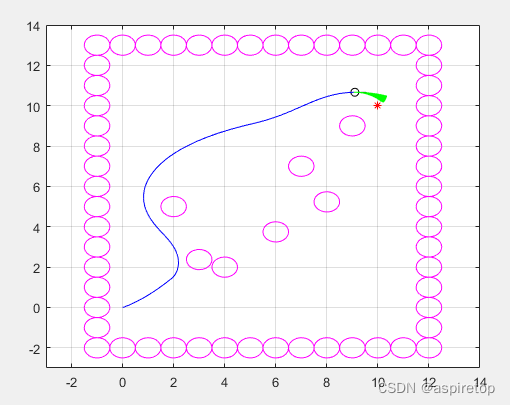
基于动态窗口的航线规划
2023-12-28 23:31:11
MATLAB2016b可以运行
% -------------------------------------------------------------------------
% File : DWA 算法
% Discription : Mobile Robot Motion Planning with Dynamic Window Approach
% Author :Yuncheng Jiang
% License : Modified BSD Software License Agreement
% 出处:https://b23.tv/rGKUTW - b站up主【WHEELTEC】
% 源代码已经配备丰富的注释,我在其基础上添加了一些个人理解。
% —— 2021/10/30 Poaoz
% -------------------------------------------------------------------------
% 流程梳理 - dwa动态窗口算法
% 1)设置初始化参数:起点、终点、障碍物、小车的速度加速度限制等
% 2)根据小车当前状态及参数,计算出小车接下来一小段时间可达到的状态(主要为速度、加速度范围)
% 3)根据上述计算而得的速度、加速度,模拟出小车接下来一小段时间可达到的路径
% 4) 借助评价函数,对上述路径进行评估,并选取出最优解,然后使小车执行(执行对应的速度、角速度)
% 5)再以小车新的位置及状态为基础,重复上述“2-5”,直到判断出小车到达终点。
% 闲谈:前面学习了RRT、A*、人工势能法,综合来看,这几种方法的套路是类似的。
% 相比较,DWA更加灵活,无需栅格化地图并且更贴合小车运动实际。
% 该函数相当于dwa算法的main函数,内容包括 参数设定、流程的梳理、绘图 。
function [] = dwa_V_1_0()
close all;
clear ;
disp('Dynamic Window Approach sample program start!!')
%% 机器人的初期状态[x(m),y(m),yaw(Rad),v(m/s),w(rad/s)]
% x=[0 0 pi/2 0 0]'; % 5x1矩阵 列矩阵 位置 0,0 航向 pi/2 ,速度、角速度均为0
x = [0 0 pi/10 0 0]';
% 下标宏定义 状态[x(m),y(m),yaw(Rad),v(m/s),w(rad/s)]
POSE_X = 1; %坐标 X
POSE_Y = 2; %坐标 Y
YAW_ANGLE = 3; %机器人航向角
V_SPD = 4; %机器人速度
W_ANGLE_SPD = 5; %机器人角速度
goal = [10,10]; % 目标点位置 [x(m),y(m)]
% 障碍物位置列表 [x(m) y(m)]
obstacle=[%0 2;
3 10*rand(1);
% 4 4;
% 5 4;
% 5 5;
6 10*rand(1);
% 5 9
% 7 8
8 10*rand(1);
2 5;
4 2;
7 7;
9 9
];
%边界障碍物,防止跑出图外
for i =-1
for j = -1:12
obstacle = [obstacle; [i,j]];
end
end
for i =12
for j = -1:12
obstacle = [obstacle; [i,j]];
end
end
for j =-2
for i = -1:12
obstacle = [obstacle; [i,j]];
end
end
for j=13
for i= -1:12
obstacle = [obstacle; [i,j]];
end
end
obstacleR = 0.5;% 冲突判定用的障碍物半径
global dt;
dt = 0.1;% 时间[s] 每一条计算得到的路径,由多个点组成 dt即为每个点之间的时间间隔
% evalParam[4]/dt+1 = 每条路径的构成点数目 这两个参数更改后,dwa算法的具体效果也将有所变化
% 机器人运动学模型参数
% 最高速度m/s],最高旋转速度[rad/s],加速度[m/ss],旋转加速度[rad/ss],
% 速度分辨率[m/s],转速分辨率[rad/s]]
Kinematic = [1.0,toRadian(20.0),0.2,toRadian(50.0),0.01,toRadian(1)]; % 调用函数里面的 model
%定义Kinematic的下标含义 % Kinematic 在路径计算相关函数中,大量用到
MD_MAX_V = 1;% 最高速度m/s]
MD_MAX_W = 2;% 最高旋转速度[rad/s]
MD_ACC = 3;% 加速度[m/ss]
MD_VW = 4;% 旋转加速度[rad/ss]
MD_V_RESOLUTION = 5;% 速度分辨率[m/s]
MD_W_RESOLUTION = 6;% 转速分辨率[rad/s]]
% 评价函数参数 [heading,dist,velocity,predictDT]
% 航向得分的比重、距离得分的比重、速度得分的比重、向前模拟轨迹的时间
evalParam = [0.045, 0.1 ,0.1, 3.0];
% evalParam = [2, 0.2 ,0.2, 3.0];
area = [-3 14 -3 14];% 模拟区域范围 [xmin xmax ymin ymax]
% 模拟实验的结果
result.x=[]; %累积存储走过的轨迹点的状态值
tic; % 估算程序运行时间开始
flag_obstacle = [1-2*rand(1) 1-2*rand(1) 1-2*rand(1)];
vel_obstacle = 0.05;
temp = 0;
abc = 0;
%movcount=0;
%% Main loop 循环运行 5000次 指导达到目的地 或者 5000次运行结束
for i = 1:5000
% DWA参数输入 返回控制量 u = [v(m/s),w(rad/s)] 和 轨迹 ~ 即机器人将采用的控制参数
[u,traj] = DynamicWindowApproach(x,Kinematic,goal,evalParam,obstacle,obstacleR); % 算出下发速度u/当前速度u
x = f(x,u); % 机器人移动到下一个时刻的状态量 根据当前速度和角速度推导 下一刻的位置和角度
abc = abc+1;
% 历史轨迹的保存
result.x = [result.x; x']; %最新结果 以行的形式 添加到result.x,保存的是所有状态参数值,包括坐标xy、朝向、线速度、角速度,其实应该是只取坐标就OK
% 是否到达目的地
if norm(x(POSE_X:POSE_Y)-goal')<0.25 % norm函数来求得坐标上的两个点之间的距离
disp('==========Arrive Goal!!==========');break;
end
%====Animation====
hold off; % 关闭图形保持功能。 新图出现时,取消原图的显示。
ArrowLength = 0.5; % 箭头长度
% 机器人 ~ 绘图操作
% quiver(x,y,u,v) 在 x 和 y 中每个对应元素对组所指定的坐标处将向量绘制为箭头
quiver(x(POSE_X), x(POSE_Y), ArrowLength*cos(x(YAW_ANGLE)), ArrowLength*sin(x(YAW_ANGLE)),'ok');
% 绘制机器人当前位置的航向箭头
hold on;
%启动图形保持功能,当前坐标轴和图形都将保持,从此绘制的图形都将添加在这个图形的基础上,并自动调整坐标轴的范围
plot(result.x(:,POSE_X),result.x(:,POSE_Y),'-b');hold on; % 绘制走过的所有位置 所有历史数据的 X、Y坐标
plot(goal(1),goal(2),'*r');hold on; % 绘制目标位置
for j = 1:3
if obstacle(j,2) > 10 && flag_obstacle(j) > 0 || obstacle(j,2) < 0 && flag_obstacle(j) < 0
flag_obstacle(j) = -flag_obstacle(j);
end
% obstacle(j,2)=obstacle(j,2)+flag_obstacle(j)*vel_obstacle;
end
%plot(obstacle(:,1),obstacle(:,2),'*k');hold on; % 绘制所有障碍物位置
DrawObstacle_plot(obstacle,obstacleR);
% 探索轨迹 画出待评价的轨迹
if ~isempty(traj) %轨迹非空
for it=1:length(traj(:,1))/5 %计算所有轨迹数 traj 每5行数据 表示一条轨迹点
ind = 1+(it-1)*5; %第 it 条轨迹对应在traj中的下标
plot(traj(ind,:),traj(ind+1,:),'-g');hold on; %根据一条轨迹的点串画出轨迹 traj(ind,:) 表示第ind条轨迹的所有x坐标值 traj(ind+1,:)表示第ind条轨迹的所有y坐标值
end
end
axis(area); %根据area设置当前图形的坐标范围,分别为x轴的最小、最大值,y轴的最小最大值
grid on;
drawnow limitrate; %刷新屏幕. 当代码执行时间长,需要反复执行plot时,Matlab程序不会马上把图像画到figure上,这时,要想实时看到图像的每一步变化情况,需要使用这个语句。
for j = 1:3
if norm(obstacle(j,:)-x(1:2)')-obstacleR < 0
disp('==========Hit an obstacle!!==========');
temp = 1;
break;
end
end
if temp == 1
break;
end
% movcount = movcount+1;
% mov(movcount) = getframe(gcf);% 记录动画帧
end
toc; %输出程序运行时间 形式:时间已过 ** 秒。
disp(abc)
%movie2avi(mov,'movie.avi'); %录制过程动画 保存为 movie.avi 文件
%% 绘制所有障碍物位置 ok
% 输入参数:obstacle 所有障碍物的坐标 obstacleR 障碍物的半径
function [] = DrawObstacle_plot(obstacle,obstacleR)
r = obstacleR;
theta = 0:pi/20:2*pi;
for id=1:length(obstacle(:,1))
x = r * cos(theta) + obstacle(id,1);
y = r *sin(theta) + obstacle(id,2);
plot(x,y,'-m');
end
%plot(obstacle(:,1),obstacle(:,2),'*m');hold on; % 绘制所有障碍物位置
%% DWA算法实现 ok
% model 机器人运动学模型 最高速度[m/s],最高旋转速度[rad/s],加速度[m/ss],旋转加速度[rad/ss], 速度分辨率[m/s],转速分辨率[rad/s]]
% 输入参数:当前状态、模型参数、目标点、评价函数的参数、障碍物位置、障碍物半径
% 返回参数:控制量 u = [v(m/s),w(rad/s)] 和 轨迹集合 N * 31 (N:可用的轨迹数)
% 选取最优参数的物理意义:在局部导航过程中,使得机器人避开障碍物,朝着目标以较快的速度行驶。
function [u,trajDB] = DynamicWindowApproach(x,model,goal,evalParam,ob,R)
% Dynamic Window [vmin,vmax,wmin,wmax] 最小速度 最大速度 最小角速度 最大角速度速度
Vr = CalcDynamicWindow(x,model); % 1)根据当前状态 和 运动模型 计算当前的参数允许范围
% 评价函数的计算 evalDB N*5 每行一组可用参数 分别为 速度、角速度、航向得分、距离得分、速度得分
% trajDB 每5行一条轨迹 每条轨迹都有状态x点串组成
[evalDB,trajDB]= Evaluation(x,Vr,goal,ob,R,model,evalParam); % 2)evalParam 评价函数参数 [heading,dist,velocity,predictDT]
if isempty(evalDB)
disp('no path to goal!!');
u=[0;0];return;
end
% 各评价函数正则化
evalDB = NormalizeEval(evalDB);
% 3)最终评价函数的计算 - 从诸多可以选择的轨迹中,选择一个“最优”的路径
feval=[];
for id=1:length(evalDB(:,1)) % 遍历各个可运行的路径,分别计算其评价得分
feval = [feval;evalParam(1:3)*evalDB(id,3:5)']; %根据评价函数参数 前三个参数分配的权重 计算每一组可用的路径参数信息的得分
end
evalDB = [evalDB feval]; % 最后一组;加最后一列,每一组速度的最终得分
[maxv,ind] = max(feval);% 4)选取评分最高的参数 对应分数返回给 maxv 对应下标返回给 ind
u = evalDB(ind,1:2)';% 返回最优参数的速度、角速度
%% 评价函数 内部负责产生可用轨迹 ok
% 输入参数 :当前状态、参数允许范围(窗口)、目标点、障碍物位置、障碍物半径、评价函数的参数
% Vr保存着机器人当前状态可达到的 最小最大的速度与角速度 model保存着机器人的一些性能参数,如该函数中使用的 速度和角速度的分辨率
% 返回参数: (返回一堆可以行进的轨迹~这些轨迹还需进行评价函数的筛选,从而得到最终的前进路径)
% evalDB N*5 每行一组可用参数 分别为 速度、角速度、航向得分、距离得分、速度得分
% trajDB 每5行一条轨迹 每条轨迹包含 前向预测时间/dt + 1 = 31 个轨迹点(见生成轨迹函数)
function [evalDB,trajDB] = Evaluation(x,Vr,goal,ob,R,model,evalParam)
evalDB = [];
trajDB = [];
for vt = Vr(1):model(5):Vr(2) %根据速度分辨率遍历所有可用速度: 最小速度和最大速度 之间 速度分辨率 递增
for ot=Vr(3):model(6):Vr(4) %根据角度分辨率遍历所有可用角速度: 最小角速度和最大角速度 之间 角度分辨率 递增
% 轨迹推测; 得到 xt: 机器人向前运动后的预测位姿; traj: 当前时刻 到 预测时刻之间的轨迹(由轨迹点组成)
[xt,traj] = GenerateTrajectory(x,vt,ot,evalParam(4)); %evalParam(4),前向模拟时间;
% 各评价函数的计算
heading = CalcHeadingEval(xt,goal); % 前项预测终点的航向得分 偏差越小分数越高
[dist,Flag] = CalcDistEval(xt,ob,R); % 前项预测终点 距离最近障碍物的间隙得分 距离越远分数越高
vel = abs(vt); % 速度得分 速度越快分越高
stopDist = CalcBreakingDist(vel,model); % 制动距离的计算
if dist > stopDist && Flag == 0 % 如果可能撞到最近的障碍物 则舍弃此路径 (到最近障碍物的距离 大于 刹车距离 才取用)
evalDB = [evalDB;[vt ot heading dist vel]]; % flag 是否会碰到障碍物的标志
trajDB = [trajDB;traj]; % 每5行 一条轨迹
end
end
end
%% 归一化处理 ok
% 每一条轨迹的单项得分除以本项所有分数和
function EvalDB=NormalizeEval(EvalDB)
% 评价函数正则化
if sum(EvalDB(:,3))~= 0 % 航向得分
EvalDB(:,3) = EvalDB(:,3)/sum(EvalDB(:,3)); %矩阵的数除 单列矩阵的每元素分别除以本列所有数据的和
end
if sum(EvalDB(:,4))~= 0 % 距离得分
EvalDB(:,4) = EvalDB(:,4)/sum(EvalDB(:,4));
end
if sum(EvalDB(:,5))~= 0 % 速度得分
EvalDB(:,5) = EvalDB(:,5)/sum(EvalDB(:,5));
end
%% 单条轨迹生成、轨迹推演函数. ok
% 输入参数: 当前状态、vt当前速度、ot角速度、evaldt 前向模拟时间、机器人模型参数(没用到)
% 返回参数; 返回 预测的x和到达该x所经过的若干点 (将后者依次连线,就可得到一条预测的轨迹)
% x : 机器人模拟时间内向前运动 预测的终点位姿(状态);
% traj: 当前时刻 到 预测时刻之间 过程中的位姿记录(状态记录) 当前模拟的轨迹
% 轨迹点的个数为 evaldt / dt + 1 = 3.0 / 0.1 + 1 = 31
function [x,traj] = GenerateTrajectory(x,vt,ot,evaldt)
global dt;
time = 0;
u = [vt;ot];% 输入值
traj = x; % 机器人轨迹
while time <= evaldt
time = time+dt; % 时间更新
x = f(x,u); % 运动更新 前项模拟时间内 速度、角速度恒定
traj = [traj x]; % 每一列代表一个轨迹点 一列一列的添加
end
%% 计算制动距离 ok
%根据运动学模型计算制动距离, 也可以考虑成走一段段圆弧的累积 简化可以当一段段小直线的累积
% 利用 当前速度和机器人可达到的加速度,计算其速度减到0所走距离
function stopDist = CalcBreakingDist(vel,model)
global dt;
MD_ACC = 3;% 加速度
stopDist=0;
while vel>0 %给定加速度的条件下 速度减到0所走的距离
stopDist = stopDist + vel*dt;% 制动距离的计算
vel = vel - model(MD_ACC)*dt;%
end
%% 障碍物距离评价函数 ok
%(机器人在当前轨迹上与最近的障碍物之间的距离,如果没有障碍物则设定一个常数)
% 输入参数:位姿、所有障碍物位置、障碍物半径
% 输出参数:当前预测的轨迹终点的位姿距离所有障碍物中最近的障碍物的距离 如果大于设定的最大值则等于最大值
% 距离障碍物距离越近分数越低
function [dist,Flag] = CalcDistEval(x,ob,R)
dist=100; % 无障碍物的默认值
for io = 1:length(ob(:,1))
disttmp = norm(ob(io,:)-x(1:2)')-R; % 位置x到某个障碍物中心的距离 - 障碍物半径 !!!有可能出现负值吗
if disttmp <0 % 该位置会碰到障碍物
Flag = 1;
break;
else % 碰不到障碍物
Flag = 0;
end
if dist > disttmp % 大于最小值 则选择最小值
dist = disttmp;
end
end
% 障碍物距离评价限定一个最大值,如果不设定,一旦一条轨迹没有障碍物,将太占比重
if dist >= 3*R %最大分数限制
dist = 3*R;
end
%% heading的评价函数计算 ok
% 输入参数:当前位置、目标位置
% 输出参数:航向参数得分 = 180 - 偏差值
% 当前车的航向和相对于目标点的航向 偏离程度越小 分数越高 最大180分
function heading = CalcHeadingEval(x,goal)
theta = toDegree(x(3));% 机器人朝向
goalTheta = toDegree(atan2(goal(2)-x(2),goal(1)-x(1)));% 目标点相对于机器人本身的方位
% 下面的 targetTheta 也就是 小车当前航向与目标点的差值 (正数)
if goalTheta > theta
targetTheta = goalTheta-theta;% [deg]
else
targetTheta = theta-goalTheta;% [deg]
end
heading = 180 - targetTheta;
%% 计算动态窗口 model - 速度加速度等基本参数。 ok
% 返回 最小速度 最大速度 最小角速度 最大角速度速度
function Vr = CalcDynamicWindow(x,model)
V_SPD = 4;%机器人速度
W_ANGLE_SPD = 5;%机器人角速度
MD_MAX_V = 1;% 最高速度m/s]
MD_MAX_W = 2;% 最高旋转速度[rad/s]
MD_ACC = 3;% 加速度[m/ss]
MD_VW = 4;% 旋转加速度[rad/ss]
global dt;
% 车子速度的最大最小范围 依次为:最小速度 最大速度 最小角速度 最大角速度速度
Vs=[0 model(MD_MAX_V) -model(MD_MAX_W) model(MD_MAX_W)];
% 根据当前速度以及加速度限制计算的动态窗口 依次为:最小速度 最大速度 最小角速度 最大角速度速度
Vd = [x(V_SPD)-model(MD_ACC)*dt x(V_SPD)+model(MD_ACC)*dt ...
x(W_ANGLE_SPD)-model(MD_VW)*dt x(W_ANGLE_SPD)+model(MD_VW)*dt];
% 最终的Dynamic Window
Vtmp = [Vs;Vd]; % 2 X 4矩阵 每一列依次为:最小速度 最大速度 最小角速度 最大角速度速度
Vr = [max(Vtmp(:,1)) min(Vtmp(:,2)) max(Vtmp(:,3)) min(Vtmp(:,4))]; % 设定的参数 与 计算的速度 比较
%% Motion Model 根据当前状态推算下一个控制周期(dt)的状态。 oh!坐标变换的计算原理?
% u = [vt; wt];当前时刻的速度、角速度 x = 状态[x(m),y(m),yaw(Rad),v(m/s),w(rad/s)]
function x = f(x, u)
global dt;
F = [1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 0 0
0 0 0 0 0];
B = [dt*cos(x(3)) 0
dt*sin(x(3)) 0
0 dt
1 0
0 1];
x= F*x+B*u; % 为何这样计算,暂不明白
% 弧度和角度之间的换算
%% degree to radian
function radian = toRadian(degree)
radian = degree/180*pi;
%% radian to degree
function degree = toDegree(radian)
degree = radian/pi*180;
%% END
文章来源:https://blog.csdn.net/ljjjjjjjjjjj/article/details/135280282
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!