ROS-ROS运行管理-ROS元功能包
2023-12-13 20:55:25
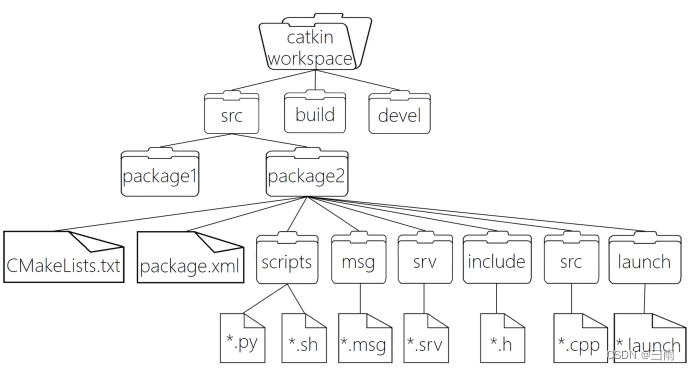
ROS是多进程(节点)的分布式框架,一个完整的ROS系统实现:
- 可能包含多台主机;
- 每台主机上又有多个工作空间(workspace);
- 每个的工作空间中又包含多个功能包(package);
- 每个功能包又包含多个节点(Node),不同的节点都有自己的节点名称;
- 每个节点可能还会设置一个或多个话题(topic)…
场景:完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模块下有地图、定位、路径规划…等不同的子级功能包。那么调用者安装该模块时,需要逐一的安装每一个功能包吗?
显而易见的,逐一安装功能包的效率低下,在ROS中,提供了一种方式可以将不同的功能包打包成一个功能包,当安装某个功能模块时,直接调用打包后的功能包即可,该包又称之为元功能包(metapackage)。
概念
MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
例如:
- sudo apt install ros-noetic-desktop-full命令安装ros时就使用了元功能包,该元功能包依赖于ROS中的其他一些功能包,安装该包时会一并安装依赖。
还有一些常见的MetaPackage:navigation moveit! turtlebot3 …
作用
方便用户的安装,我们只需要这一个包就可以把其他相关的软件包组织到一起安装了。
实现
首先:新建一个功能包
然后:修改package.xml ,内容如下:
<exec_depend>被集成的功能包</exec_depend>
.....
<export>
<metapackage />
</export>
最后:修改 CMakeLists.txt,内容如下:
cmake_minimum_required(VERSION 3.0.2)
project(demo)
find_package(catkin REQUIRED)
catkin_metapackage()
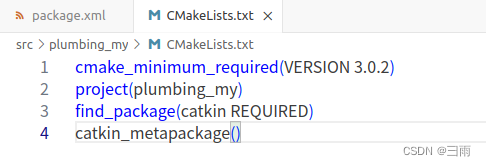
其他的都删掉
PS:CMakeLists.txt 中不可以有换行。
参考:
[1]Autolabor-ROS机器人入门课程《ROS理论与实践》季基础教程
[2]【Autolabor初级教程】ROS机器人入门
[3]胡春旭.ROS机器人开发实践[M].机械工业出版社,2018.
文章来源:https://blog.csdn.net/qq_46276154/article/details/134979094
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!