异步通知
一、异步通知
1、应用场景
当应用程序不想休眠时,可以使用异步通知的方式;当驱动程序有数据时主动通知应用程序,应用程序收到信号后执行信息处理函数。
2、执行流程(基于读取按键值的情景)
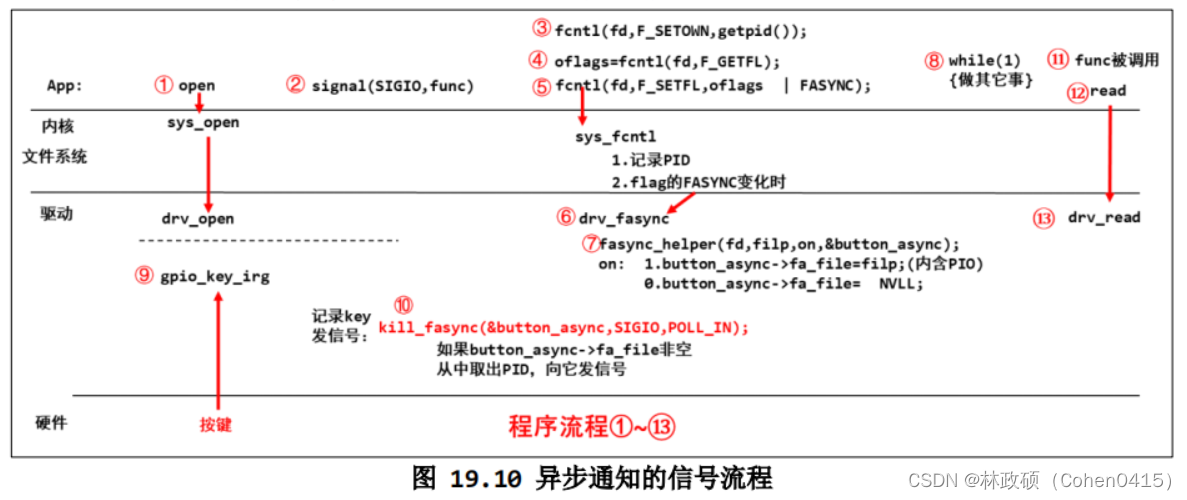
大致思想:驱动程序会发送信号给应用程序,应用程序收到信号会执行指定函数;
应用程序使用的关键函数:
- sighandler_t signal(int signum, sighandler_t handler)
- int fcntl(int fd, int cmd, … /* arg */ )
驱动程序使用的关键函数:
- int fasync_helper(int fd, struct file * filp, int on, struct fasync_struct **fapp)
- void kill_fasync(struct fasync_struct **fp, int sig, int band)
2.1、应用程序具体做什么?
以下涉及的函数并不是函数原型,而是从实际程序里复制出来的;以下步骤序号和上图序号无关联;
①、应用程序需要使用 signal(SIGIO, func) 函数绑定信号与函数,这样收到驱动程序发送的信号后func()函数会自动执行,读按键操作就在func()函数里完成;
②、那驱动程序到底发送信号给谁是由 fcntl(fd, F_SETOWN, getpid()) 函数决定,这个函数是把应用程序的pid告诉驱动程序;
③、随后使用 flags = fcntl(fd, F_GETFL) 来获取标志位;再通过 fcntl(fd, F_SETFL, flags | FASYNC) 启动fasync功能,启用fasync功能实际上就会调用驱动层的drv_fasync()函数,下面介绍drv_fasync();
2.2、驱动程序具体做什么?
以下涉及的函数并不是函数原型,而是从实际程序里复制出来的;以下步骤序号和上图序号无关联;
①、驱动程序里需要实现drv_fasync()函数,而该函数里只需要调用 fasync_helper(fd, file, on, &button_fasync) 函数,button_fasync是一个fasync_struct类型的结构体,里面会存放应用程序的pid,后续发送信号时也会用到button_fasync;
②、信号的发送在按键中断程序里,调用 kill_fasync(&button_fasync, SIGIO, POLL_IN) 发送信号;
三、程序
1、驱动程序
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
struct gpio_key{
int gpio;
struct gpio_desc *gpiod;
int flag;
int irq;
};
static struct gpio_key *gpio_keys_f1c100s;
static int major = 0;
static struct class *key_class;
static int g_key = 0;
struct fasync_struct *button_fasync;
static DECLARE_WAIT_QUEUE_HEAD(gpio_key_wait);
static ssize_t key_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
wait_event_interruptible(gpio_key_wait, g_key);
err = copy_to_user(buf, &g_key, 4);
g_key = 0;
return 4;
}
static int key_drv_fasync(int fd, struct file *file, int on)
{
if (fasync_helper(fd, file, on, &button_fasync) >= 0)
return 0;
else
return -EIO;
}
static struct file_operations key_drv = {
.owner = THIS_MODULE,
.read = key_drv_read,
.fasync = key_drv_fasync,
};
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
struct gpio_key *gpio_key = dev_id;
int val;
val = gpiod_get_value(gpio_key->gpiod);
printk("key %d %d\n", gpio_key->gpio, val);
g_key = (gpio_key->gpio << 8) | val;
wake_up_interruptible(&gpio_key_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN); //发送信号
return IRQ_HANDLED;
}
static int f1c100s_key_probe(struct platform_device *pdev)
{
struct device_node *node = pdev->dev.of_node;
int err;
int i;
int count;
enum of_gpio_flags flag;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
count = of_gpio_count(node); //获取GPIO数量
if(!count)
{
printk("%s %s line %d, there isn't any gpio available\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
gpio_keys_f1c100s = kzalloc(sizeof(struct gpio_key) * count, GFP_KERNEL);
if(gpio_keys_f1c100s == NULL)
{
printk("%s %s line %d, kzalloc fail\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
for(i = 0; i < count; i++)
{
gpio_keys_f1c100s[i].gpio = of_get_gpio_flags(node, i, &flag);
if (gpio_keys_f1c100s[i].gpio < 0)
{
printk("%s %s line %d, of_get_gpio_flags fail\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
gpio_keys_f1c100s[i].gpiod = gpio_to_desc(gpio_keys_f1c100s[i].gpio);
gpio_keys_f1c100s[i].flag = flag & OF_GPIO_ACTIVE_LOW;
gpio_keys_f1c100s[i].irq = gpio_to_irq(gpio_keys_f1c100s[i].gpio); //获取中断号
}
for(i = 0; i < count; i++)
{
err = request_irq(gpio_keys_f1c100s[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING, "f1c100s_gpio_key", &gpio_keys_f1c100s[i]); //申请中断
}
major = register_chrdev(0, "f1c100s_key", &key_drv);
key_class = class_create(THIS_MODULE, "f1c100s_key_class");
if (IS_ERR(key_class)) {
unregister_chrdev(major, "f1c100s_key");
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return PTR_ERR(key_class);
}
device_create(key_class, NULL, MKDEV(major, 0), NULL, "keys-key");
return 0;
}
static int f1c100s_key_remove(struct platform_device *pdev)
{
struct device_node *node = pdev->dev.of_node;
int count;
int i;
device_destroy(key_class, MKDEV(major, 0));
class_destroy(key_class);
unregister_chrdev(major, "f1c100s_key");
count = of_gpio_count(node);
for (i = 0; i < count; i++)
{
free_irq(gpio_keys_f1c100s[i].irq, &gpio_keys_f1c100s[i]);
}
kfree(gpio_keys_f1c100s);
return 0;
}
static const struct of_device_id f1c100s_key_table[] = {
{ .compatible = "f1c100s,keysdrv" },
{ },
};
static struct platform_driver f1c100s_key_driver = {
.probe = f1c100s_key_probe,
.remove = f1c100s_key_remove,
.driver = {
.name = "f1c100s_keys",
.of_match_table = f1c100s_key_table,
},
};
static int __init f1c100s_key_init(void)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
err = platform_driver_register(&f1c100s_key_driver);
return err;
}
static void __exit f1c100s_key_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
platform_driver_unregister(&f1c100s_key_driver);
}
module_init(f1c100s_key_init);
module_exit(f1c100s_key_exit);
MODULE_LICENSE("GPL");
2、测试应用程序
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>
static int fd;
static void sig_func(int sig)
{
int bit = 1;
int val;
read(fd, &val, 4);
bit &= val;
val >>= 8;
printf("get %d button : %d\n", val, bit);
bit = 1;
}
/*
* ./button_test /dev/keys-key
*
*/
int main(int argc, char **argv)
{
int flags;
/* 1. 判断参数 */
if (argc != 2)
{
printf("Usage: %s <dev>\n", argv[0]);
return -1;
}
signal(SIGIO, sig_func); //绑定信号与函数
/* 2. 打开文件 */
fd = open(argv[1], O_RDWR);
if (fd == -1)
{
printf("can not open file %s\n", argv[1]);
return -1;
}
fcntl(fd, F_SETOWN, getpid()); //传入应用程序pid
flags = fcntl(fd, F_GETFL); //获取flags
fcntl(fd, F_SETFL, flags | FASYNC); //启动fasync功能,驱动程序的key_drv_fasync()会被调用
/* 3. 写文件 */
while(1)
{
printf("asyn button test\n");
sleep(2);
}
close(fd);
return 0;
}
三、总结
1、以上专业术语或名词解释有个人理解,感谢指点纠错!
2、视频学习B站韦东山:【第5篇】嵌入式Linux驱动开发基础知识 - 异步通知
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!